
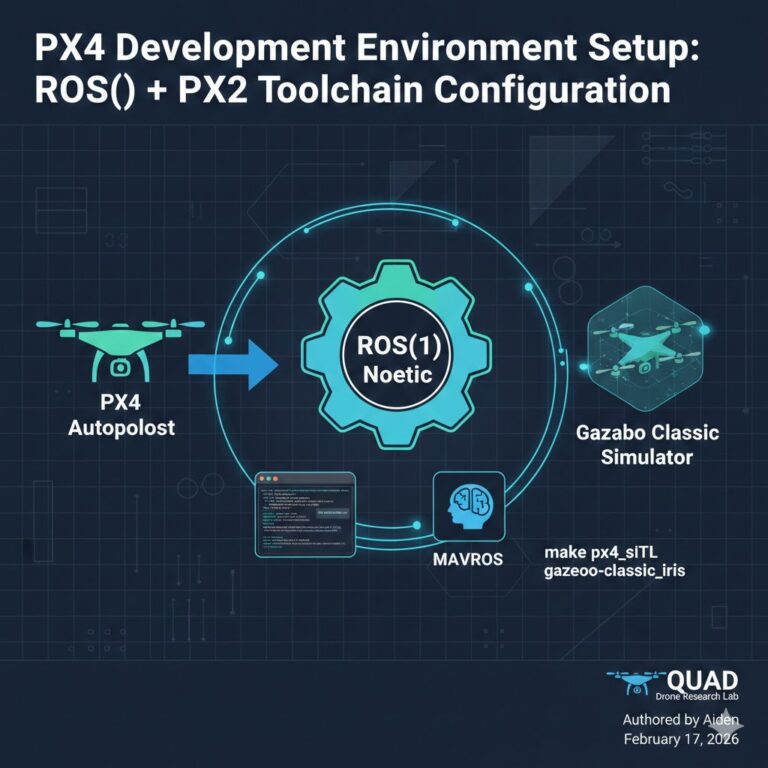
Setting Up PX4 Development Environment – Configuring ROS(1) + PX4 Toolchain
Hello. This is Aiden from the Marketing Team. his time, I would like to introduce the configuration of the PX4 development environment, specifically focusing on the ROS(1) + PX4 Toolchain setup. Please be advised that this content is the registered intellectual property of QUAD Drone Lab, and we kindly ask that you refrain from any…