

차세대 AI 및 V-SLAM 연구를 위한 최적의 플랫폼: QUAD Q250-V3 심층 분석
안녕하세요. 마케팅팀 에이든 입니다.
오늘은 연구자분들의 귀한 시간을 아껴드리고, 오직 연구 본연의 성과에 집중할 수 있도록 설계된 저희 쿼드(QUAD)의 Q250-V3 Opti 자율주행 드론 플랫폼을 소개해 드리고자 합니다.

1. 서론: 현대 UAV 연구의 핵심 과제와 플랫폼의 필연성
오늘날 무인 항공기(UAV) 연구는 단순한 비행 제어를 넘어 AI 기반 상황 인식, 실내 비순응 환경(Non-GPS)에서의 자율 주행, 그리고 ROS2 기반의 군집 비행으로 그 패러다임이 완전히 전환되었습니다. 이러한 고차원적인 연구를 수행하는 대학 연구실과 기업 R&D 센터가 직면한 가장 큰 장벽은 ‘하드웨어의 안정성‘과 ‘소프트웨어 통합의 복잡성‘입니다.
연구자에게 가장 소중한 자산은 ‘시간‘입니다. 비행 제어기(FC)의 하드웨어 이슈나 컴패니언 컴퓨터와의 통신 설정에 수주를 허비하는 것은 연구 경쟁력 저하로 직결됩니다. 따라서 연구 목적에 최적화된 검증된 플랫폼을 선택하는 것은 연구의 성패를 결정짓는 연역적 전제 조건이 됩니다. 이번 글에서는 쿼드(QUAD) 드론연구소의 Q250-V3가 왜 현대 드론 연구의 표준이 되어야 하는지 설명드리겠습니다.
2. 시장 분석: 기존 연구용 플랫폼의 한계와 연구자의 요구사항
현재 시장에서 통용되는 연구용 드론 플랫폼들은 각기 다른 타겟층을 가지고 있으나, 최신 AI/V-SLAM 연구에는 명확한 한계를 보입니다.
주요 제품 사양 및 장단점 비교
| 구분 | Holybro X500 V2 | Hexoon TD650 (Cube) | NXP HoverGames |
| 주 용도 | 캡스톤 디자인, 일반 비행 제어 연구, 군집 비행 | 라이다 매핑, 물류 배송 실험, 고중량 센서 탑재 | 임베디드 SW 교육, AI 영상 처리, 코딩 대회 |
| 추천 FC | Pixhawk 6C / 6X | Cube Orange+ (ADS-B 내장) | FMUK66 (전용 FC) |
| 크기/무게 | 500mm / 소형~중형 | 650mm / 중형 | 500mm 미만 / 소형 |
| 난이도 | ★★☆☆☆ (쉬움) | ★★★☆☆ (보통) | ★★★★☆ (SW 세팅 복잡) |
| 가격대 | 중간 (약 50~80만 원 선, FC 포함) | 높음 (약 100만 원 이상, 부품 구성에 따라 다름) | 중간 |
위의 분석에서 알 수 있듯, 연구자들은 실내외를 가리지 않는 기동성(250mm급)을 갖추면서도, Jetson Orin과 같은 고성능 AI 모듈을 안정적으로 구동할 수 있는 고출력 플랫폼을 갈구해 왔습니다.
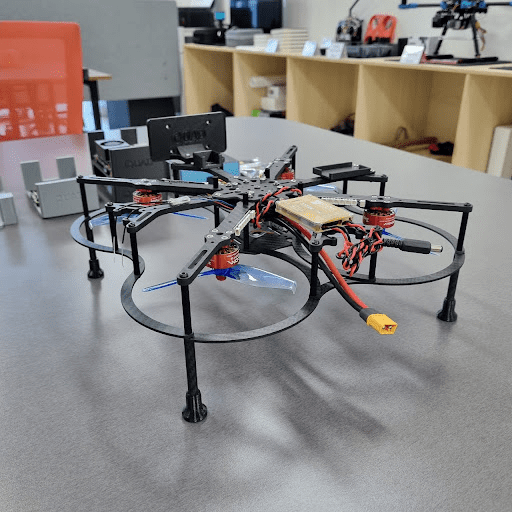
3. Q250-V3의 기술적 우위성 Ⅰ: 하드웨어 설계의 정밀도
Q250-V3는 기존 소형 드론의 한계를 뛰어넘는 하드웨어 스펙을 자랑합니다.
3.1. 고성능 비행 제어 및 파워 트레인
Q250-V3는 현존 최고 사양인 H7 프로세서 탑재 Pixhawk 호환 FC(STM32H743, 480MHz)를 기반으로 합니다. 이는 복잡한 EKF2/3 필터와 실시간 진동 제어(FFT)를 수행하면서도 연산 자원에 여유를 제공합니다. 또한, BrotherHobby 고성능 BLDC 모터와 65A BLHeli_32 ESC를 조합하여 이륙 중량 1.2kg 상태에서도 민첩한 기동을 보장합니다.
3.2. Solder-less 기반의 신속한 조립 및 유지보수
연구용 기체의 핵심은 ‘재구성 가능성’입니다. Q250-V3는 무납땜(Solder-less) 설계를 지향하여, 연구원들이 인두기를 들고 시간을 낭비하는 대신 전용 케이블 연결만으로 시스템을 구축할 수 있도록 설계되었습니다.


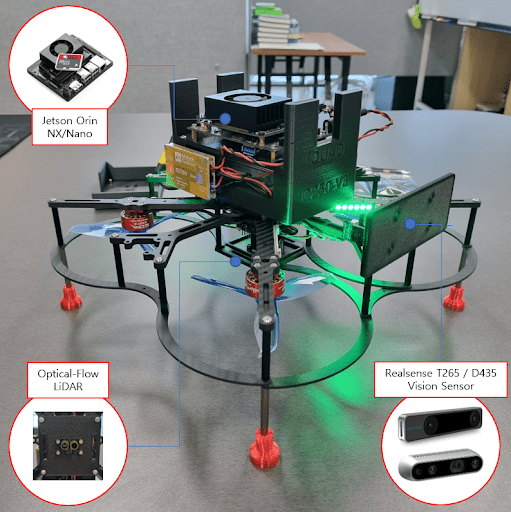
4. Q250-V3의 기술적 우위성 Ⅱ: 센서 및 컴패니언 컴퓨터 통합 생태계
자율주행 드론 연구의 성패는 컴패니언 컴퓨터(NVIDIA Jetson)와 센서(RealSense, LiDAR)를 어떻게 물리적·논리적으로 통합하느냐에 달려 있습니다.
4.1. 3D 프린팅 기반의 모듈형 마운트 시스템
Q250-V3는 Jetson Orin Nano, Raspberry Pi 4/5 등 다양한 연산 모듈을 즉시 장착할 수 있는 전용 3D 프린팅 마운트를 제공합니다. 또한, Intel RealSense T265/D435와 같은 비전 센서를 기계적 오차 없이 정밀하게 고정할 수 있는 전용 브라켓이 포함되어 V-SLAM 연구의 정밀도를 높여줍니다.

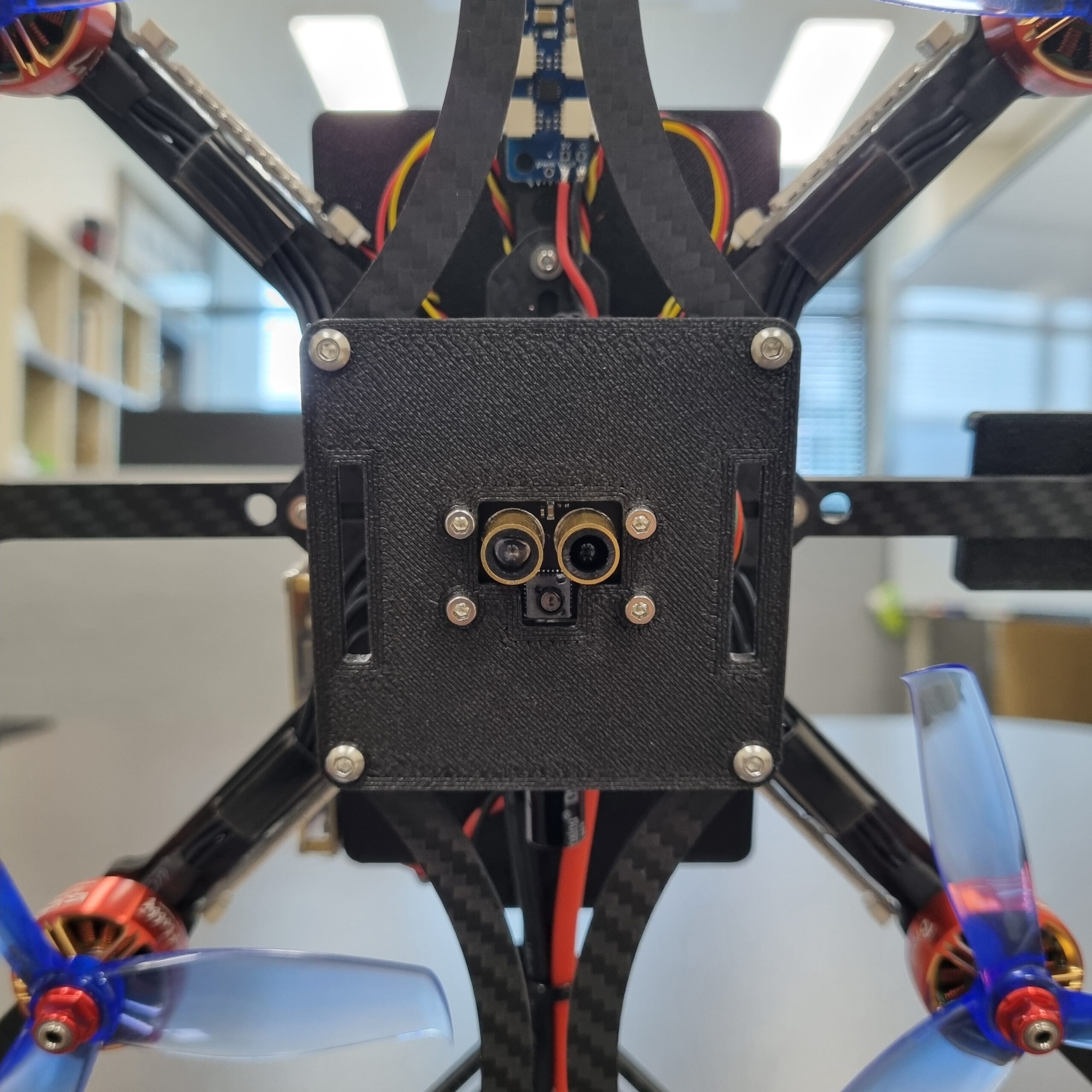
4.2. 실내 자율주행을 위한 Optical Flow / LiDAR 통합
GPS 신호가 두절된 실내나 터널 환경에서의 연구를 위해 하단부에 Optical-Flow와 LiDAR 센서를 기본 배치할 수 있는 구조를 갖추고 있습니다. 이를 통해 연구자는 실내 정밀 호버링을 즉시 구현할 수 있습니다.
5. 소프트웨어 생태계: 하드웨어를 넘어선 지능형 이미지 제공
Q250-V3는 단순히 부품의 집합이 아닙니다. 쿼드 드론연구소는 연구의 즉각성을 위해 최적화된 소프트웨어 스택(SD카드 이미지)을 제공합니다.
- Ubuntu 22.04 LTS & ROS2 Humble: 최신 로봇 운영체제 표준 완벽 지원
- CUDA 가속 OpenCV & RealSense SDK: NVIDIA GPU를 활용한 초고속 영상 처리 환경 기구축
- Livox MID-360 SDK: Livox사의 MID-360을 이용하여 SLAM을 바로 시작할 수 있는 라이브러리 포함.
- QUAD 컴패니언 소프트웨어 SD: PX4를 즉시 구동할 수 있는 MAVLink, px4_ros_com 라이브러리 포함
이러한 ‘Plug & Play’ 소프트웨어 환경은 연구자가 시스템 세팅에 소요되는 시간을 최소 2주 이상 단축할 수 있게 해줍니다.
6. 비교 분석을 통한 공정한 판단: Q250-V3가 제시하는 연구의 효율성
시장의 기존 제품들과 Q250-V3를 종합 비교했을 때, 본 플랫폼은 다음과 같은 차별적 우위를 점합니다.
- 공간적 유연성: 500mm급 표준형 기체(X500)가 갖지 못한 실내 운용의 안전성과 650mm급 기체(TD650)가 갖지 못한 휴대성을 동시에 확보하였습니다.
- 연산 능력의 최적화: 소형 레이싱 드론급의 기동성에 Jetson Orin이라는 강력한 두뇌를 결합한 유일무이한 폼팩터입니다.
- 학습 및 연구 리소스: 단순 판매에 그치지 않고, GitBook 기반의 한국어 교재와 YouTube 강좌, 페이스북 전문가 커뮤니티를 통해 지속적인 기술 지원을 제공합니다.
7. 결론: 연구의 ‘속도’와 ‘깊이’를 결정짓는 탁월한 선택
UAV 연구의 본질은 알고리즘의 고도화와 데이터의 가치 창출에 있습니다. 하드웨어 조립과 소프트웨어 의존성 해결은 연구의 필수 과정일 수는 있으나, 그 자체가 연구의 목적이 될 수는 없습니다.
QUAD Q250-V3는 연구자가 겪어야 할 불필요한 시행착오를 연구소 차원에서 미리 겪고 해결해 놓은 플랫폼입니다.
안정적인 하드웨어, 정밀한 센서 통합 시스템, 그리고 이미 검증된 소프트웨어 스택은 연구자로 하여금 곧바로 본질적인 문제 해결에 뛰어들 수 있게 합니다. 대학의 캡스톤 디자인부터 석·박사의 심도 있는 V-SLAM 연구, 그리고 기업의 산업용 자율주행 프로토타이핑까지, Q250-V3는 단순한 드론 그 이상의 ‘연구 파트너’로서 여러분의 성과를 가장 빠르게 증명해 보일 것입니다.
지금까지 Q250-V3가 왜 현대 UAV 자율주행 연구의 가장 효율적인 대안이 될 수 있는지 살펴보았습니다. 쿼드(QUAD) 드론연구소가 지향하는 가치는 단순히 우수한 기체 판매에 머물지 않습니다.
쿼드(QUAD) 드론연구소가 추구하는 본질은 연구자가 하드웨어의 한계에 부딪히지 않고 오직 혁신적인 알고리즘 개발과 데이터의 가치 창출에만 전념할 수 있는 연구 몰입 환경을 구축하는 것입니다.
저희는 단순한 기체 공급자를 넘어, 검증된 기술 스택과 교육 리소스를 제공함으로써 연구의 진입장벽을 낮추는 독보적인 생태계를 지향합니다.
이번 Q250-V3 소개를 시작으로, 앞으론 다양한 특수 목적용 플랫폼 라인업과 실전 세미나 자료 공유등이 연재될 예정입니다. 감사합니다.

작성자: 에이든, 쿼드(QUAD) 드론연구소 마케팅팀
기고일: 2026.02.08

![PX4 MAVSDK – C++ Programming [3편] MAVSDK C++ 설치 및 SITL 시뮬레이션 환경 구축](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0313_인포그래픽-768x419.jpg)
![[PX4 튜닝 시리즈 7] 착륙 감지기 설정 (Land Detector Configuration): 완벽한 비행의 마무리를 위한 필수 가이드](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Drone-Ground-Contact-Landing-Logic-768x429.png)
![[PX4 Tuning Series Appendix] Racing Drone Tuning Guide (Racer Setup): Unlocking Extreme Performance](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Racing-Drone-Minimalism-and-Balance-768x429.png)
![PX4 MAVSDK – C++ Programming [Episode 7] Moving to a Specific Location (goto_location) and Understanding the Haversine Formula](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0317_인포-768x512.png)
![PX4 MAVSDK – C++ Programming [Episode 5] Querying System Information and Using Telemetry](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0315_인포그래피-768x512.png)