드론 자재 선정 – 추력부 : 911 FALCON 프로젝트
안녕하세요, 쿼드(QUAD) 드론연구소의 이근찬 선임연구원입니다.
지난 2주차 글에서는 911 FALCON의 GPS 기반 복귀 목적지 갱신 구조를 포함한 통신 시스템 아키텍처(System Architecture)를 정리해 보았습니다.
이번 3주차부터는 드론 제작에 앞서 기체 자재 선정 과정을 파트별로 정리해 보겠습니다. 한 번에 다 담기엔 내용이 많아, 추력부 → 전원부 → 제어·통신부 순서로 나누어 연재할 예정입니다.
이번 글에서는 그 첫 번째로 추력부(모터·ESC·프롭·배터리)를 Iteration(반복 수렴)을 통한 선정과정을 중심으로 정리해 보겠습니다.

임무 요구조건 정의
시작으로 임무 요구조건을 먼저 정의했습니다. 목표는 구호 POD를 투하한 뒤에도 안정적으로 복귀해, 운용 루프를 끊기지 않게 이어갈 수 있는 기체를 만드는 것입니다.
임무 요구조건을 수치화하기 위해, 아래 세 가지를 핵심 성능 지표(KPI)로 확정했습니다.
- 페이로드 1kg 실운반 가능
- 페이로드 적재 시에도 운용시간 20분 이상 확보(현실 운용 기준)
- 바람/기동 여유 확보를 위한 추력비(TWR) 약 2.2 이상 목표
이 기준을 먼저 고정한 이유는, 추력계는 최대 추력보다 실제 임무 구간에서의 효율과 안정성이 전체 운용을 결정하기 때문입니다. 페이로드 1kg은 구호물품 실운반이라는 임무 자체를 수치화한 기준이고, 20분 운용시간은 투하 이후에도 복귀·재출격까지 이어지는 운용 루프를 고려한 최소 운용 기준입니다. 또한 TWR≈2.2는 바람과 기동 상황에서도 제어 여유를 확보해, 배터리 임계치 구간에서도 안정적으로 복귀할 수 있도록 잡은 안전 마진입니다. 결과적으로 이 세 KPI는 이후 모터·프롭·배터리 조합을 반복 수렴할 때 판단 기준이 되어, 선정 과정이 한쪽으로 치우치지 않도록 중심을 잡아줍니다.

STEP 1 : 프레임 선정(벤치마킹을 통한 스케일 업)
STEP 1에서는 프레임을 선정했습니다. 초기에는 기존에 보유한 7인치 FPV 롱레인지 기체 사용을 고려했습니다.
하지만 7인치 기체는 페이로드 0.7~1.2kg 구간에서 효율·발열·비행시간이 급격히 악화되는 경향이 있고, 특히 페이로드 1kg을 넘기면 비행시간이 10분대 이하로 떨어질 가능성이 커 “투하 후 복귀” 같은 임무 루프에서 운용 여유가 부족해질 수 있다는 결론을 얻었습니다. 즉, 7인치급 기체는 운용한계가 명확하며 반복 출격과 현장 운용을 전제로 하면 발열·효율 저하·복귀 안정성 측면의 리스크가 커집니다.

또한 상용수색 드론으로 가장 많이 사용하는 DJI사의 Matrice 30 시리즈(M30/M30T)는 약 668mm급 기체이며, 전용 프로펠러(1671)의 디스크 직경이 약 40.6cm(16인치)로 명시되어 있습니다. 이는 페이로드를 싣고 안정적으로 장시간 운용하기 위해선 대구경(≈16인치) 프로펠러와 그에 맞는 프레임 스케일이 필요하다는 방향성을 뒷받침합니다.

반복 수렴(Iteration) 방식을 통한 부품선정 절차
추력계 설계에서 발생하는 상호 의존성을 해소하기 위해, 반복 수렴(Iteration) 방식으로 사양을 확정했습니다. 추력계는 총 중량(AUW)과 모터/배터리 사양이 서로 의존적이기 때문에, 단일 계산으로 한 번에 확정하기가 어렵습니다. 따라서 아래의 흐름을 따라 부품을 수렴하도록 하겠습니다.
- 기준 고정: 임무 요구조건, 플랫폼 스케일(15인치급), 전압 체계(6S) 확정
- 프롭 선고정: 직경/피치 먼저 확정 → 모터 후보군 범위 제한
- 드라이 중량 산출: 배터리 제외 구성요소 합산으로 중량 범위 산출
- 배터리 중량 및 총중량(AUW) 산정: 배터리 비율 가정으로 AUW 타깃 수렴
- 모터 1차 선정: AUW 기준 호버 추력(AUW/4) + 목표 TWR(≈2.2) 요구 추력 계산
- 벤치 검증: 후보 모터의 호버 스로틀/최대추력/최대전류 확인
- 스펙업 결정: 목표 TWR 미달 시 상위 체급 모터로 전환
- ESC 확정: 최대전류에 운용 마진(1.3~1.5) 적용해 정격 결정
- 배터리 수렴 및 확정: 6S 고정 상태에서 목표 운용시간 기준 용량/중량 후보 수렴 후 최종 결정
STEP 2 : 프레임/프로펠러 확정
STEP 2에서는 효율을 우선으로 프레임과 프로펠러를 먼저 고정했습니다. 장시간 체공과 페이로드 운용에서는 동일한 추력을 내더라도 프로펠러 디스크 면적이 커질수록 호버 효율이 좋아지고, 그만큼 전류가 내려가 비행시간이 늘어나는 방향으로 설계가 가능합니다.
따라서 추력계의 기준을 먼저 잡기 위해 아래 구성으로 프레임/프롭을 확정했습니다.
- 프레임: 15인치 프로펠러급 프레임(650mm급)
- 프롭: GEMFAN 1540 (15×4) Slow Fly Carbon Fiber
15×4 조합을 선택한 이유는 다음과 같습니다. 15인치 직경으로 디스크 면적을 확보해 호버 효율을 높이고, 저 피치(4”) 구성으로 호버·저속 구간에서 과부하를 줄여 전류와 발열을 낮출 수 있기 때문입니다. 또한 ‘Slow Fly’ 성격은 고속 기동보다는 정속/호버 중심 임무 프로파일과 잘 맞아, 수색 및 복귀 루프를 안정적으로 수행하는 데 유리합니다.


[GEMFAN] 1540 Slow Fly Carbon Fiber
STEP 3 : 드라이 중량 산출과 AUW(All-Up Weight)설정
STEP 3에서는 모터/ESC/배터리가 아직 미정인 상태에서도 AUW를 합리적으로 잡기 위해, 먼저 드라이 중량(배터리 제외 기체 중량)을 정의하고 범위 기반으로 1차 산출한 뒤, 대표값을 확정하고 배터리 비율(30~35%)을 적용해 기체 총 중량 AUW를 수렴했습니다.
3-1) 드라이 중량 산출
배터리가 미정인 단계에서 AUW를 먼저 잡기 위해, 배터리를 제외한 기체 중량을 드라이 중량(Drone Dry Weight)으로 정의했습니다. 이 단계에서는 모터/ESC도 아직 미정이므로, 15인치급 플랫폼에서 현실적으로 들어갈 수 있는 구성요소를 항목별로 합산해 범위를 설정했습니다.
- 프레임(약): 0.81 kg
- 프로펠러 15인치급(4개): 0.08 ~ 0.15 kg
- 모터(4개): 0.40 ~ 0.80 kg
- ESC(4개): 0.10 ~ 0.28 kg
- 전장/분배(FC, GPS, 수신기, Jetson, PDB 등): 0.50 kg
- 배선/커넥터(XT90)·나사류: 0.10 ~ 0.20 kg
- 랜딩기어/브라켓/마운트류: 0.15 ~ 0.40 kg
- 전원부(레귤레이터/BEC/센서 등): 0.05 ~ 0.15 kg
- Payload(운용 가정치): 1.00 kg
이를 합산하면 드라이 중량 범위는 다음과 같습니다.
3-2) 드라이 중량 평균값
이후 계산을 위한 대표값으로 평균값을 사용했습니다.
따라서 대표 드라이 중량 = 3.74 kg으로 확정했습니다.
3-3) 배터리 비율(30~35%) 가정 → AUW/배터리 중량 산정
배터리 비율을 변수 로 가정하고(ex: 30%, )
대표 드라이 중량을 기준으로 AUW는 다음과 같이 역산할 수 있습니다.
— 배터리 비율 30% 가정() —
— 배터리 비율 35% 가정() —
결과
- 대표 드라이 중량 = 3.74 kg
- 배터리 중량: 1.60 ~ 2.01 kg
- AUW(All-Up Weight): 5.34 ~ 5.75 kg (≈ 5.3 ~ 5.8 kg)

이후 모터/ESC/배터리 선정 단계에서는 위에서 확정한 AUW(5.34~5.75kg)를 입력값으로 사용해 추력계를 수렴하겠습니다.
STEP 4 : 1차 모터 선정 및 데이터 시트 기반 출력검증
STEP 4에서는 1차 모터 후보를 선정하고 AUW를 기준으로 모터 1개당 필요한 추력 요구치를 계산했습니다. 이후 데이터 시트에서 호버링 구간이 적절한지 확인했습니다.
- →
- →
즉, 호버링 시 모터 1개당 약 1.33~1.44kgf의 추력이 필요합니다.
다음으로 MN4010 KV370의 데이터 시트를 기준으로(22.2V, 프로펠러 T-MOTOR 15×5 CF) 호버링 스로틀 구간을 매칭했습니다.
- 65%: 1300g, 7.0A, 155.4W
- 75%: 1620g, 9.3A, 206.5W
- 100%: 2240g, 14.6A, 324.1W
호버링 추력 요구치는 65~75% 스로틀 구간에 걸쳐 위치합니다. 65% 근방에서는 요구치에 거의 일치해 효율적으로 호버링이 가능하지만, 스로틀 구간 75%에 가까워질수록 의미가 “여유 증가”가 아니라 스로틀 마진 감소로 바뀝니다. 즉 바람·급기동·상승처럼 추가 추력이 필요한 순간에, 확보할 수 있는 여유가 줄어들 수 있습니다.

STEP 5 : MN4010 기준 1차 ESC 선정
STEP 5에서는 초기안(MN4010)을 기준으로 1차 ESC를 선정했습니다. 먼저 데이터 시트에서 확인된 MN4010 KV370(+ 1550 prop)의 최대 전류는 14.6A이며, 실운용에서의 발열·환경 변동을 고려해 운용 마진 1.3~1.5를 동일하게 적용했습니다.
즉, 계산상 요구 전류 정격은 약 19~21.0A 범위로 산정됩니다. 이를 안정적으로 상회하고, 실제 운용에서의 발열 여유와 신뢰성까지 확보하기 위해 초기 ESC 후보군은 30A급으로 선정했습니다.

STEP 6 : MN4010의 TWR 계산 및 추력
STEP 6에서는 목표 추력비(Thrust-to-Weight Ratio) TWR≈2.2를 만족하는지 재검증하기 위해, AUW 기준으로 요구되는 최대 추력과 MN4010 370KV의 최대추력을 정량적으로 비교했습니다.
먼저 목표 TWR(2.2)에서 모터 1개당 요구되는 최대 추력은 다음과 같습니다.
- →
- →
즉, 목표 TWR≈2.2를 만족하려면 모터 1개당 약 2.94~3.16kgf 수준의 최대추력이 필요합니다.
다음으로 MN4010 KV370(+ 1550 prop)의 데이터 시트 최대추력을 비교했습니다. MN4010의 데이터 시트 최대추력은 2240g = 2.24kgf로 확인되며, 이는 목표치와 비교하면 다음 관계가 됩니다.
따라서 목표 TWR≈2.2 기준에서는 MN4010의 추력 여유가 부족하다는 결론입니다.
이를 실제 TWR 수치로도 명시하면, MN4010의 모터 1개당 최대추력 2.24kgf 기준 전체 최대추력은
이고, AUW(5.34~5.75kg)에서의 실제 TWR은 (*TWR = Thrust(추력) ÷ Weight(무게))
즉 MN4010의 TWR은 약 1.56~1.68 수준으로, 목표(TWR≈2.2)에 미달합니다.
결론적으로 MN4010은 호버는 가능하지만, 본 프로젝트의 운용 여유 기준(TWR≈2.2)을 만족시키기에는 부족하여 상위 체급 모터로의 스펙업이 필요했습니다.
STEP 7 : 2차 모터 선정 및 데이터 시트 기반 출력검증
STEP 7에서는 모터를 상위 체급으로 스펙업한 뒤, AUW 기준으로 모터 1개당 필요한 추력 요구치를 계산했습니다. 이후 데이터 시트에서 호버링 구간이 적절한지 확인했습니다.
AUW에서 모터 1개당 호버 요구 추력은 다음과 같습니다.
- →
- →
즉, 호버링 시 모터 1개당 약 1.33~1.44kgf가 필요합니다.
다음으로 MN5212 KV420의 데이터 시트를 기준으로(22.2V, 프로펠러 T-MOTOR 15×5 CF) 호버링 스로틀 구간을 매칭했습니다.
- 50%: 1204g
- 55%: 1478g (≈ 호버 요구치 근접)
- 65%: 1983g
- 75%: 2589g
- 85%: 3230g (≈ 목표 TWR 구간 핵심)
- 100%: 4175g
호버링 추력 요구치는 약 55% 스로틀 구간에서 충족됩니다. 이는 초기안(MN4010) 대비 호버링 스로틀이 낮아진 구성으로, 실제 운용 구간에서 전류·발열 부담을 줄이고 제어 여유(스로틀 마진)를 확보하는 데 유리합니다.

STEP 8 : MN5312 기준 2차 ESC 선정
STEP 8에서는 최종 모터(MN52120)를 기준으로 2차 ESC를 선정했습니다. 먼저 데이터 시트에서 확인된MN5212 KV420( + 1550 prop)의 최대전류는 36.7A이며, 실운용에서의 발열·환경 변동을 고려해 운용 마진 1.3~1.5를 동일하게 적용했습니다.
즉, 요구 정격은 약 47.7~55.1A 범위로 산정됩니다. 이를 안정적으로 상회하고, 연속 운용에서의 발열 여유까지 확보하기 위해 최종 ESC는 60A급으로 확정했습니다.

STEP 9 : MN5212, 목표추력 충족 여부 검증
STEP 9에서는 목표 추력비 TWR≈2.2를 만족하는지 재검증하기 위해, AUW 기준으로 요구되는 최대 추력과 MN5212 KV420의 최대추력을 정량적으로 비교했습니다.
먼저 목표 TWR(2.2)에서 모터 1개당 요구되는 최대 추력은 다음과 같습니다.
즉, 목표 TWR≈2.2를 만족하려면 모터 1개당 약 2.94~3.16kgf 수준의 최대추력이 필요합니다.
다음으로 MN5212 KV420(+ 1550 prop)의 데이터 시트 최대추력을 비교했습니다. MN5212의 데이터 시트 최대추력은 4175g = 4.175kgf로 확인되며, 이는 목표치와 비교하면 다음 관계가 됩니다.
따라서 목표 TWR≈2.2 기준에서 MN5212는 목표 최대추력을 충분히 상회하며, 추력 여유를 확보할 수 있습니다.
이를 실제 TWR 수치로도 명시하면, MN5212의 모터 1개당 최대추력 4.175kgf 기준 전체 최대추력은
이고, 설계 타깃 AUW(5.34~5.75kg)에서의 실제 TWR은
즉 MN5212의 TWR은 약 2.90~3.13 수준으로, 목표(TWR≈2.2)를 충분히 만족합니다.
결론적으로, MN5212는 호버링은 물론 목표 추력 기준에서도 운용 여유가 확보되며, 본 프로젝트의 운용 여유 기준(TWR≈2.2)에 적합한 선택입니다.
STEP 10 : 핵심 성능 지표(KPI)를 충족, 배터리 선정
STEP 10에서는 6S 체계를 고정한 상태에서, 30분 목표 체공시간을 만족하는 배터리 용량/중량 후보군을 먼저 수렴한 뒤, 최종적으로 실측과 구매 제품 스펙을 기준으로 확정했습니다.
접근 방식은 다음과 같습니다.
- 30분 목표에서 필요한 에너지(Wh)를 추정
- 에너지(Wh)를 Ah로 환산
- 중량 증가로 AUW가 커지는 악순환을 피하도록 후보군을 정리
10-1) 운용시간 30분 목표, 기준 용량 후보군
30분(0.5h) 체공에 필요한 에너지는 “호버 효율(W/kg) × AUW × 시간”으로 근사할 수 있습니다. 단, 배터리를 100%까지 사용하지 않고 유효 사용률 80%(0.8)만 사용한다고 가정했습니다.
- 호버 효율 가정: 100~140 W/kg
- 체공시간: 0.5h(30분)
- 사용 가능 비율: 0.8
본 설계의 AUW은 STEP 4에서 도출한 이므로, 이를 기준으로 계산하면 6S 기준 대략 다음 범위로 수렴합니다.
- 효율 좋음(100~120 W/kg) → 6S 16Ah ~ 20Ah
- 효율 보통(120~140 W/kg) → 6S 19Ah ~ 22Ah
따라서 30분 목표 기준 용량 후보군은 6S 16Ah ~ 22Ah로 설정했습니다.
10-2) 중량 관점 수렴
배터리는 용량을 키우면 체공시간이 늘어나는 반면, 배터리 중량이 증가해 AUW가 커지고 호버 전력도 함께 증가하는 악순환이 생길 수 있습니다. 그래서 용량 후보군을 “중량 범위”로도 함께 제약했습니다.
- 6S 16Ah: 약 1.6~2.0kg
- 6S 22Ah: 약 2.2~2.8kg
용량을 무리하게 키우는 방식은 AUW 상승을 유발해 결과적으로 효율이 떨어질 수 있으므로, 본 설계에서는 STEP 4에서 도출한 배터리 중량 타깃(약 1.60~2.01kg)과 정합성을 우선으로 두었습니다.
10-3) 현 단계 배터리 확정 기준
따라서 설계 단계에서는 STEP 4의 배터리 중량 타깃(1.60~2.01kg)과 정합한 6S 16Ah급을 중심 후보로 두고, 필요 시 효율(실측 W/kg)에 따라 상향 여부를 판단하는 전략을 채택했습니다.
- 용량 후보군: 6S 16Ah ~ 22Ah (30분 목표 충족 가능 범위)
- 중량 목표: STEP 4 기준 1.60~2.01kg 정합
- 전략: 16Ah를 중심으로 시작 → 실측 결과로 확장 여부 결정
10-4) 최종 배터리 확정
위 기준(중량 정합성 + 용량 후보군)을 바탕으로 최종 배터리는 아래 제품으로 확정했습니다.
- DXF 22.2V(6S) 16000mAh 25C
- 무게 약 2000g
해당 제품은 16Ah 중심 후보군에 속하면서, 약 2.0kg 수준으로 STEP 4에서 도출한 배터리 중량 타깃 범위와 맞습니다. 또한 25C 방전률과 XT90(안티스파크) 적용으로 전류가 커지는 구간에서도 전압 강하·스파크·발열 리스크를 낮출 수 있어, 현 단계 최종 배터리로 확정했습니다.

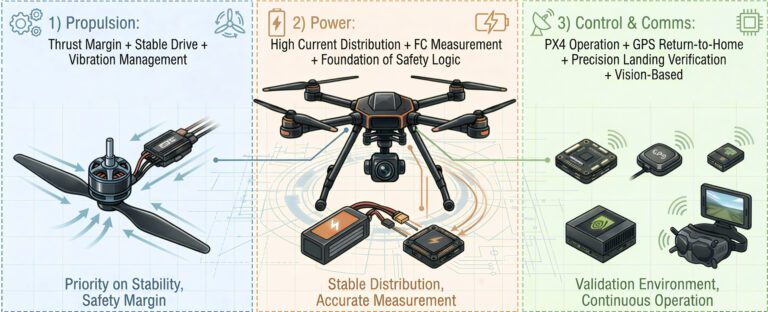
이번 글에서는 911 FALCON 드론의 추력부 부품선정 과정을 정리해 보았습니다. 임무 요구조건을 KPI로 먼저 고정한 뒤, 프레임/프로펠러 체급 결정을 먼저 선정한 후 Iteration(반복 수렴) 방식으로 AUW 수립 → 모터 · ESC · 배터리 확정까지 단계적으로 수렴해 나간 흐름을 공유 드렸습니다.
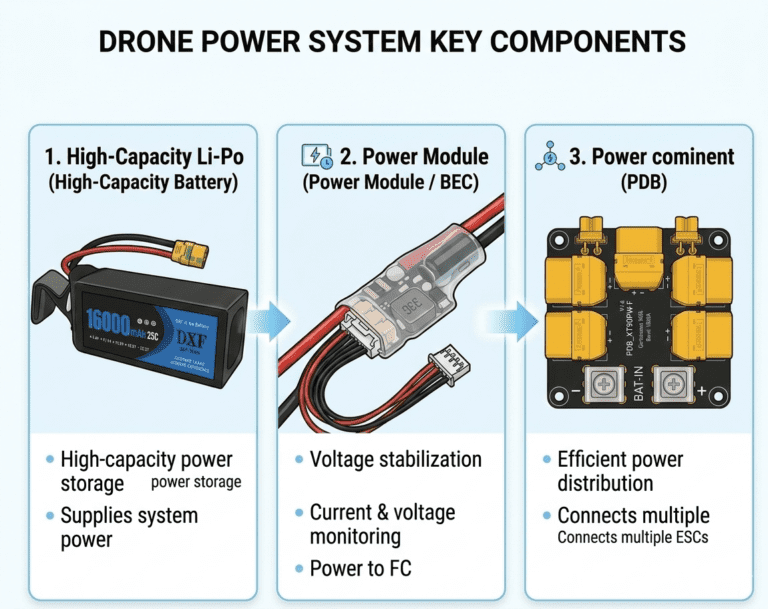
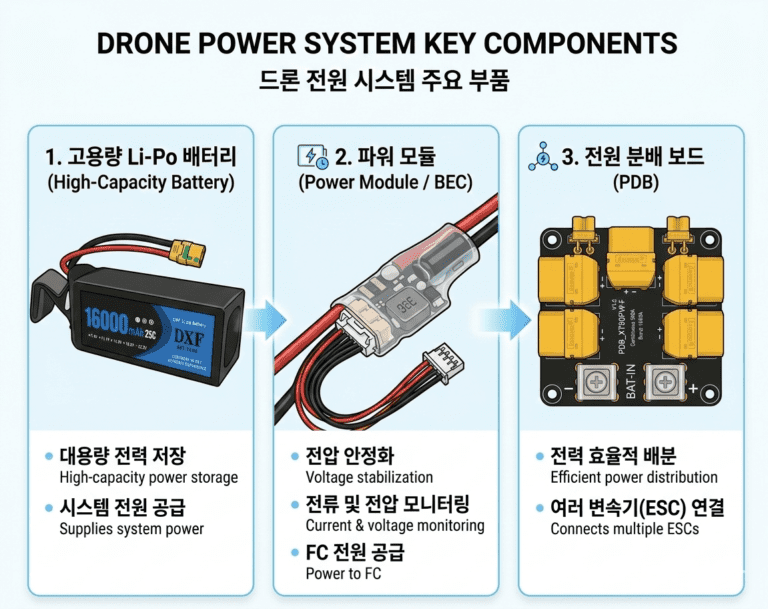
다음 편에서는 전원부(배터리·PDB·파워모듈)를 다루겠습니다. 추력부가 만들어내는 힘을 안정적으로 공급하고, 전압·전류 계측을 기반으로 임계치 운용이 흔들리지 않도록 전원 구성을 어떻게 잡았는지 정리하겠습니다.
그 다음 편에서는 통신부(FC·GPS·수신기·Jetson 및 링크 구성)를 중심으로, 비행제어와 데이터 흐름을 어떤 구성으로 연결했는지 이어서 공유드리겠습니다. 감사합니다.

작성자: 이근찬, 쿼드(QUAD) 드론연구소 선임연구원
기고일: 2026.02.25