
Drone Component Selection – Control & Communication Section : 911 FALCON Project
Hello, this is QUAD Drone Laboratory.
I’m Geunchan Lee, Senior Researcher at QUAD Drone Lab.
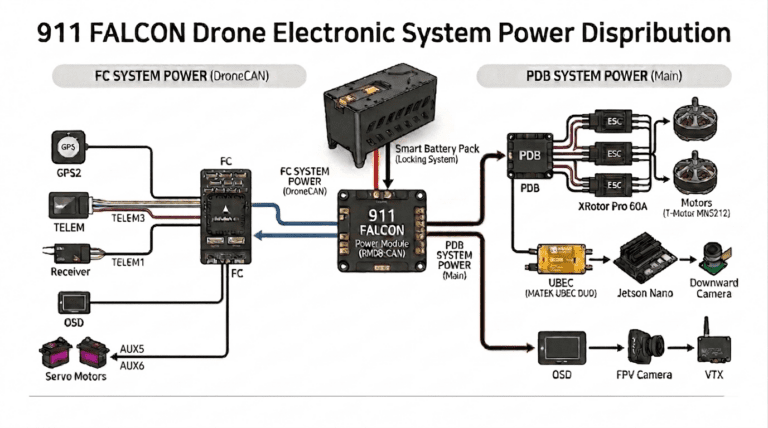
In the previous article, we covered the design and component selection process for the power system of the 911 FALCON drone. Based on the power requirements of the propulsion system, we determined the battery capacity, selected a power module and PDB to ensure stable power delivery to the flight controller and ESCs, and organized the overall power architecture, including how power is distributed to each device.
In this article, we move on to the next stage and discuss the Control & Communication System, which is directly responsible for the drone’s flight and operation.
We will review the criteria used to select key components for flight control, including the Flight Controller and Companion Computer, as well as the GPS, control link, video transmission system, and telemetry communication that connect the aircraft to external systems. Finally, we will summarize the overall control and communication architecture centered on the Pixhawk, showing how each communication device is interconnected within the system.
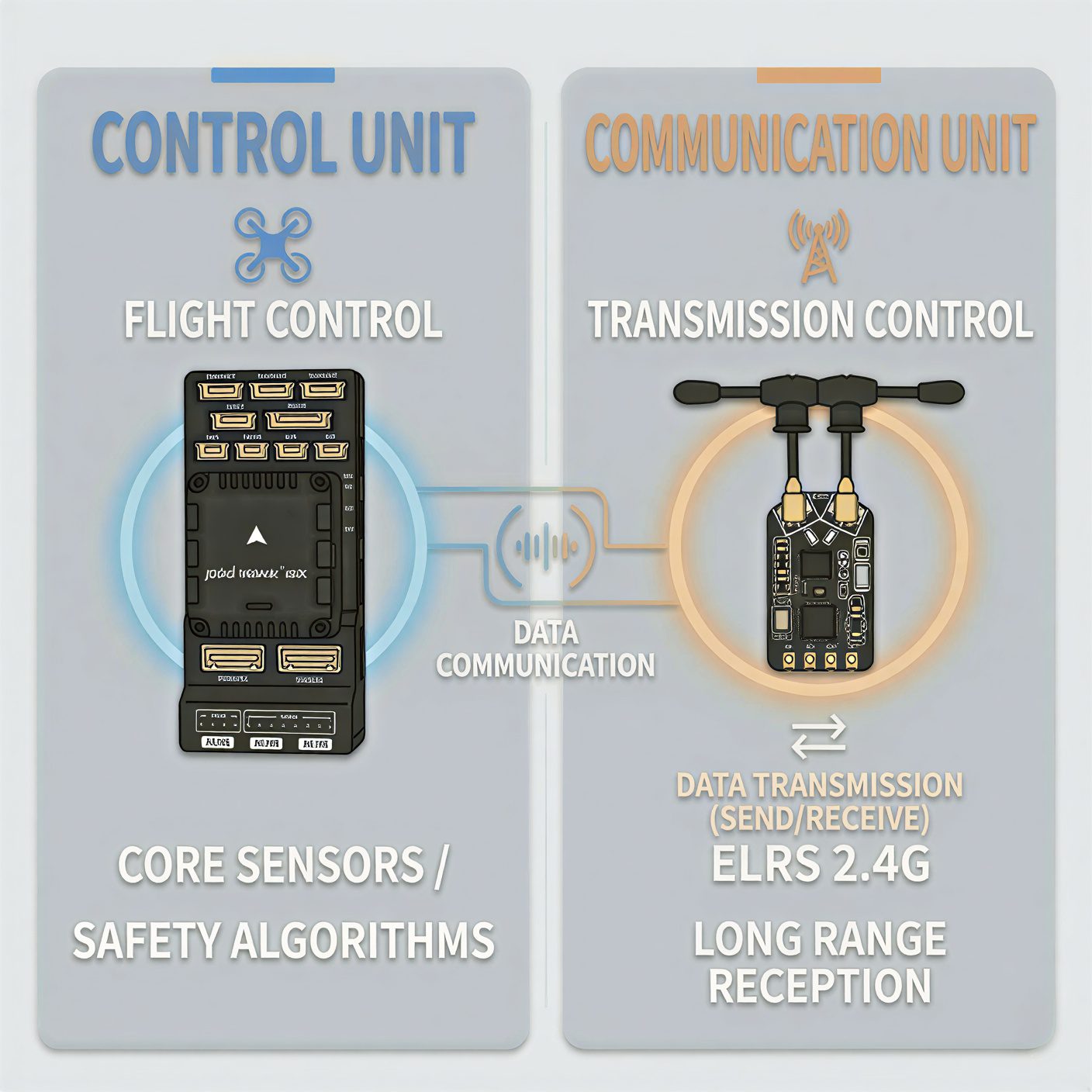
1. Flight Control System
1-1) Flight Controller (FC)
Product :
Pixhawk 6X

System Requirements
The 911 FALCON is a system that uses GPS-based flight, RTL (Return To Launch), and Companion Computer integration. Therefore, the flight controller must provide not only stable attitude control, but also sufficient expandability to support the simultaneous connection of various sensors and communication devices.
Key Specifications
- STM32H7 MCU (480 MHz)
- Dual IMU architecture
- Multiple UART / CAN interfaces
- Supports PX4 / ArduPilot
Selection Rationale
The Pixhawk 6X is a flight controller widely used in industrial drones and research platforms, making it a proven platform in terms of both stability and expandability. In addition, because it provides a variety of communication ports, it is well suited for the simultaneous integration of multiple devices such as GPS, telemetry, and a Companion Computer.
Therefore, for this aircraft, the Pixhawk 6X was selected as the flight controller in order to secure both flight stability and system expandability.
1-2) Companion Computer
Product :
Jetson Orin Nano

System Requirements
The 911 FALCON was designed not as a simple flight platform, but as a drone system intended to eventually perform survivor search and precision landing functions. To achieve this, an onboard computing device capable of performing vision processing and AI inference based on camera imagery was required.
Key Specifications
- NVIDIA Ampere GPU-based computing platform
- Up to 67 TOPS of AI computing performance
- Supports MIPI CSI camera interface
- Enables MAVLink communication with Pixhawk
Selection Rationale
Jetson Orin Nano is a platform capable of performing computer vision and AI inference through GPU-based parallel processing. This makes it possible to run survivor detection and ArUco marker-based precision landing algorithms.
Therefore, for this aircraft, the Jetson Orin Nano was selected as the Companion Computer for vision-based mission execution.
2. Communication System
The communication system of the 911 FALCON is configured with the following structure.
- Position data acquisition : GPS
- Control signal transmission : RC Link
- Video transmission : FPV System
- Flight data communication : Telemetry
Since each communication system serves a different role, they were designed as independent links to ensure stable operation.
2-1) GPS
Product :
Holybro M10 GPS

System Requirements
The 911 FALCON requires reliable position data because it uses GPS-based position hold, mission flight, and RTL functionality.
Key Specifications
- u-blox M10 GNSS chipset
- Supports multiple satellite constellations
- High positioning accuracy
- Built-in compass
Selection Rationale
The M10 GNSS module offers improved reception performance compared to the previous M8 series, allowing it to receive a greater number of satellites simultaneously while also improving positioning accuracy and initial satellite acquisition speed.
Therefore, for this aircraft, the M10 GPS module was selected to ensure the stability of autonomous flight and return-to-home functionality.
2-2) Control Signal (RC Link)
Transmitter
Product :
Jumper T20s

System Requirements
Even in an autonomous flight system, a control link that allows immediate manual intervention is essential during the development and test flight phases.
Key Specifications
- Supports ExpressLRS
- High-power RF module
- Capable of long-range RC link operation
Selection Rationale
The Jumper T20 is a transmitter well suited for use with the ExpressLRS system, as it provides a stable RF link and a wide range of configuration options. For this reason, it is a suitable transmitter for both test flights and the development environment.
Receiver
Product :
Radiomaster RP3 ExpressLRS Receiver

System Requirements
For the control link, low latency and stable signal reception are critical.
Key Specifications
- Based on ExpressLRS 2.4 GHz
- Dual-antenna diversity architecture
- Built-in LNA / PA
- High-sensitivity reception structure
Selection Rationale
The RP3 receiver can improve signal stability even when the aircraft attitude changes or when the frame causes signal blockage, thanks to its dual-antenna diversity architecture. In addition, it supports long-range RC link operation of over 10 km, making it a suitable receiver for search missions that require coverage over a wide area.
3. Video System (FPV System)
3-1) FPV Camera
Product :
Foxeer Razer Mini

System Requirements
A low-latency FPV video system was required to monitor the aircraft status and support test flights.
Key Specifications
- Low-latency FPV camera
- Compact and lightweight structure
- Compatible with FPV systems
Selection Rationale
The Foxeer Razer camera is widely used in FPV drones and is well suited for an FPV system because it provides stable image quality and low-latency performance.
3-2) OSD
Product :
Holybro Micro OSD V2

System Requirements
The 911 FALCON required an interface that allows the operator to intuitively monitor the aircraft’s status during both test flights and operation. In particular, it was necessary to display flight information such as battery voltage, flight mode, and altitude directly on the video screen, so that the operator could quickly assess the aircraft’s condition.
Key Specifications
- Compatible with Pixhawk-based flight controllers
- Supports analog FPV video overlay
- Displays battery voltage, flight mode, and basic telemetry
- Compact and lightweight structure
Selection Rationale
The Holybro Micro OSD V2 is an OSD module that can display telemetry data transmitted from the flight controller as an overlay on the FPV video feed. Through this, the operator can intuitively monitor the aircraft’s basic status directly from the video screen, without needing to check a separate ground control station display.
Therefore, for this aircraft, the Holybro Micro OSD V2 was selected so that both the video system and flight information can be monitored together.
3-3) VTX (Video Transmitter)
Product :
AKK FX2 Ultimate VTX

System Requirements
Because the 911 FALCON is a platform designed with search mission operations in mind, it required a video transmission system that would allow the footage captured by the aircraft to be reliably monitored from the ground.
Key Specifications
- 5.8 GHz analog video transmission
- Up to 1200 mW output power
- Adjustable power levels
- Compact and lightweight structure
Selection Rationale
The AKK FX2 Ultimate VTX supports video transmission with an output power of up to 1200 mW and provides performance capable of achieving a video transmission range of over 5 km in open environments. These characteristics allow the operator to reliably monitor the video feed even in search environments where the distance between the aircraft and the operator may become significant.
Therefore, for this aircraft, the AKK FX2 Ultimate VTX was selected to secure a long-range video link.
4. System Communication
4-1) Pixhawk – Jetson Communication
Product :
FTDI USB-UART Converter

System Requirements
MAVLink communication between the Pixhawk and the Companion Computer is required.\
Key Specifications
- USB-to-UART conversion
- Supports stable serial communication
Selection Rationale
The FTDI-based converter provides high UART communication stability, making it well suited for establishing a reliable MAVLink data communication link between the Pixhawk and the Jetson.
4-2) Pixhawk – Ground Control Communication
Product :
Microair LR900-F Telemetry Module

System Requirements
The ground control station must be able to monitor the aircraft status in real time and reliably receive flight data.
Key Specifications
- 900 MHz band communication
- Up to 500 mW (27 dBm) output power
- Long-range LoRa-based data link
- Supports MAVLink communication
Selection Rationale
The Microair LR900-F is a long-range telemetry module that operates in the 900 MHz band, enabling long-distance data communication in environments with minimal obstacles.
The expected communication range varies depending on the terrain, as shown below.
- Urban environment: approximately 1–5 km
- Mountainous terrain: from less than 1 km to over 20 km
- Marine environment: approximately 20–30 km or more
Therefore, the LR900-F was considered a suitable telemetry module for a search platform, as it can reliably receive aircraft status data even in drone missions that require operation over a wide area.
Control & Communication Architecture Summary
The following is a summary of the overall connection architecture of the control and communication system.
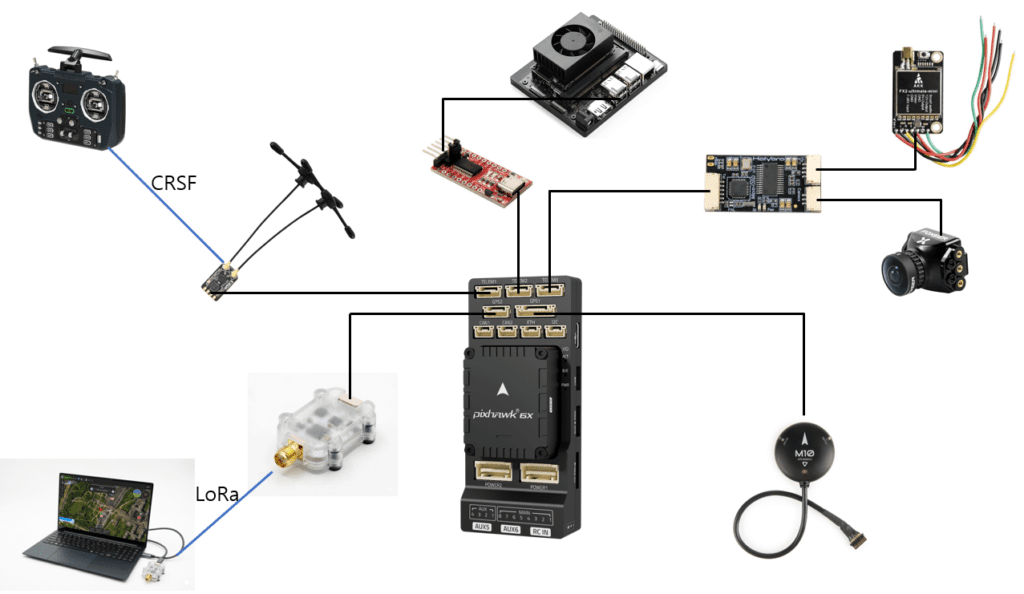
In the 911 FALCON drone, the Pixhawk 6X serves as the central hub, with the GPS, control link, telemetry, video system, and Jetson Orin Nano each connected to it, allowing flight control and data communication to operate within a single integrated architecture.
In this post, we reviewed the selection criteria for the key components that make up the control and communication systems of the 911 FALCON drone. The flight controller and Companion Computer are responsible for flight stabilization and vision processing within the aircraft, while the GPS, control link, video system, and telemetry module form the communication architecture that connects the aircraft with external systems.
In the next post, we’ll cover the next stage of the drone development process: the airframe CAD design and structural design process. We will focus on how the propulsion system, power system, and control & communication system components selected so far were actually arranged within the airframe, how dimensions and interference were reviewed, and what structural design criteria were established for manufacturing. Thank you.

Author: Guenchan lee, Senior Researcher of QUAD Drone Lab.
Date: March 15, 2026
![[ROS2 Mastery 5편] ROS2 Topic 프로그래밍 (2) – Subscriber로 위치 정보 수신하기](https://quad-drone-lab.co.kr/wp-content/uploads/2026/05/0516_인포그래피-768x429.jpg)
![[하이브리드 항법 시스템: 특별편] GPS 교란을 버텨라! PX4 Dead-Reckoning (추측 항법) 모드 완벽 가이드](https://quad-drone-lab.co.kr/wp-content/uploads/2026/05/Resilient_Drone_Dead-Reckoning_Navigation-768x429.jpg)