

V-SLAM 컴패니언컴퓨터 소프트웨어 – QUAD isaac-ros-vslam NVMe SSD 출시
안녕하세요. 쿼드(QUAD) 드론연구소 입니다.
오늘은 여러분의 자율주행 SLAM 드론 개발 시간을 단축시켜 드릴 PX4 컴패니언 컴퓨터(Jetson Orin Nano)용 V-SLAM 소프트웨어를 소개해 드리겠습니다.
이제 복잡한 NVIDIA isaac-ros-vslam 개발 환경 구축에 많은 시간을 뺏기지 마세요!!! Jetson Orin Nano에 NVMe 디스크를 꼽고 전원을 넣으면 바로 PX4와 함께 V-SLAM을 구현할 수 있습니다.
quad-compsd-orin-nano-cuvslam-1.0.0 포함 소프트웨어
- NVIDIA Jetpack 6.2.1
- Ubuntu 22.04.5 LTS, Kernel 5.15.148-tegra
- ROS2 Humble
- CUDA (v12.6.68)
- cuDNN (v9.3.0.75)
- TensorRT (v10.3.0.30)
- VPI (v3.2.4)
- OpenCV (v4.11.0) – CUDA 빌드!!!
- Jtop
- Terminator Terminal
- NVIDIA isaac-ros-vslam /w RealSense D435i (Docker) – New!!!
NVMe 제작시 100GB로 할당되어 있으나 GParted 소프트웨어를 이용하여 NVMe 용량에 최대치(256GB)까지 확장하여 사용할 수 있습니다.
GParted 설치(
$ sudo apt-get install gparted)
로그인 배너

JetPack 버전 확인
quad@jetson-orin:~$ sudo apt-cache show nvidia-jetpack
[sudo] password for quad:
Package: nvidia-jetpack
Source: nvidia-jetpack (6.2.1)
Version: 6.2.1+b38
Architecture: arm64
Maintainer: NVIDIA Corporation
Installed-Size: 194
Depends: nvidia-jetpack-runtime (= 6.2.1+b38), nvidia-jetpack-dev (= 6.2.1+b38)
Homepage: http://developer.nvidia.com/jetson
Priority: standard
Section: metapackages
Filename: pool/main/n/nvidia-jetpack/nvidia-jetpack_6.2.1+b38_arm64.deb
Size: 29300
SHA256: dd9cb893fbe7f80d2c2348b268f17c8140b18b9dbb674fa8d79facfaa2050c53
SHA1: dc630f213f9afcb6f67c65234df7ad5c019edb9c
MD5sum: 9c8dc61bdab2b816dcc7cd253bcf6482
Description: NVIDIA Jetpack Meta Package
Description-md5: ad1462289bdbc54909ae109d1d32c0a8CUDA
CUDA 12.6.85 사용을 위한 환경 변수는 .bashrc 파일에 설정되어 있습니다.
export CUDA_HOME=/usr/local/cuda
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/local/cuda/lib64:/usr/local/cuda/extras/CUPTI
export PATH=/usr/local/cuda/bin${PATH:+:${PATH}}ROS 2
ROS2 Humble 버전이 설치되어 있습니다.
변경은 ~/.bashrc 파일에 ROS 환경변수의 주석(#) 처리를 변경하여 설정할 수 있습니다.
###ROS2 Env.
source /opt/ros/humble/setup.bash
source /usr/share/colcon_cd/function/colcon_cd.sh
export _colcon_cd_root=/opt/ros/humble/
source /usr/share/colcon_argcomplete/hook/colcon-argcomplete.bash
source ~/ros2_ws/install/setup.bash
alias cb='colcon build --symlink-install'
alias cbp="colcon build --symlink-install --packages-select"
alias cbe="colcon build --symlink-install --event-handlers console_direct+"
alias cbv="colcon build --symlink-install --verbose"
#ROS_DOMAIN_ID=111 #Set your unique IDROS2 PX4 uORB v1.15
~/ros2_ws/src ROS2 작업공간에 설치되어 있습니다.
uORB는 반드시 FC의 PX4 펌웨어 버전과 일치 하여야 합니다. 그렇지 않으면 동작하지 않습니다.
quad@orin-nano:~/ros2_ws/src$ ls -l
total 16
drwxrwxr-x 9 jetson jetson 4096 aug 10 08:30 mavros
drwxrwxr-x 6 jetson jetson 4096 aug 10 11:08 offb_mavros_py
drwxrwxr-x 6 jetson jetson 4096 aug 10 15:26 px4_msgs
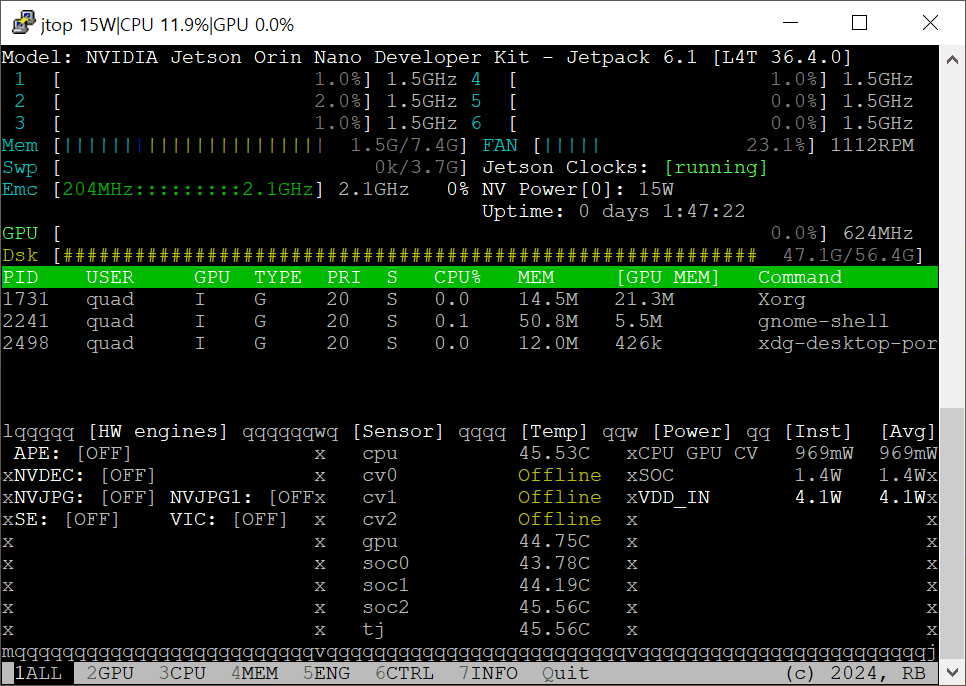
drwxrwxr-x 11 jetson jetson 4096 aug 10 15:27 px4_ros_comjetson-stats
Jetson Nano 실행 모니터링 및 오버 클컥, 냉각 제어 등 다양한 기능을 사용하여 Jetson Nano를 보다 편리하게 사용할 수 있습니다.
OpenCV 4.11.0 (CUDA build version)
CUDA로 빌드된 OpenCV 4.12.0-dev 버전을 탑재하여 GPU를 사용하여 보다 고속의 영상처리를 수행할 수 있습니다.

quad@orin-nano:~/ros2_ws$ python3
Python 3.10.12 (main, Nov 6 2024, 20:22:13) [GCC 11.4.0] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> import cv2
>>> cv2.__version__
'4.11.0-dev'
>>>NVIDIA isaac-ros-vslam /w RealSense D435i
1. 통합 런치 파일 실행
[Terminal 1]
Docker 실행:
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.shisaac_ros_visual_slam_realsense + MicroXRCEDDSAgent + px4_bridgy + px4_visualizer 일괄 실행:
source install/setup.bash
ros2 launch isaac_ros_visual_slam isaac_ros_visual_slam_realsense.launch.py3. foxglove_bridge 실행
[Terminal 2]
Docker 실행:
cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.shfoxglove_bridge 실행:
/workspaces/isaac_ros-dev/src/install_tools.sh
. install/setup.bash
ros2 launch foxglove_bridge foxglove_bridge_launch.xml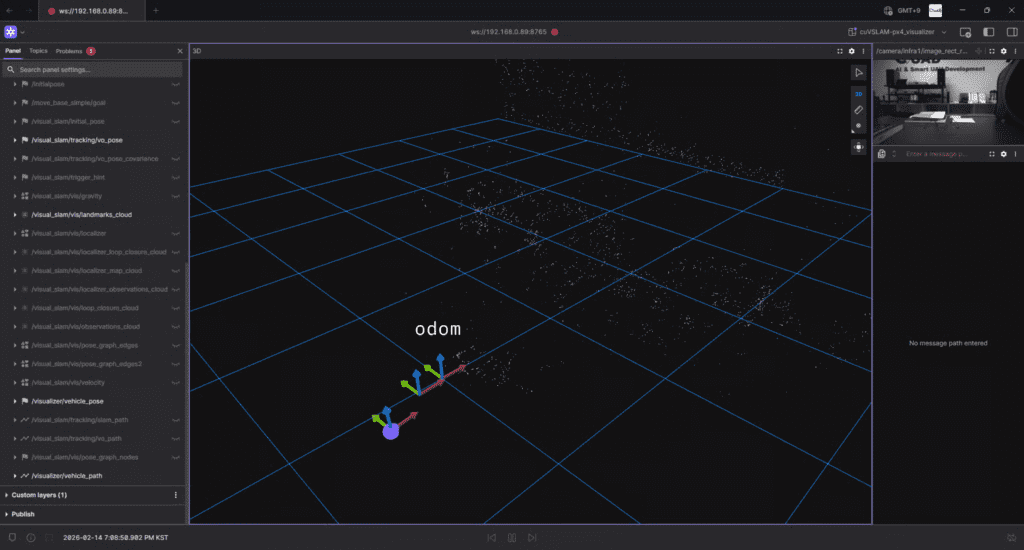
참고 영상
구매는 아래 링크를 참고 하세요!
https://smartstore.naver.com/maponarooo/products/13137989463
![[PX4 Tuning Series 7] Land Detector Configuration: The Essential Guide for a Perfect Flight Conclusion](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Drone-Ground-Contact-Landing-Logic-768x429.png)
![PX4 MAVSDK – C++ Programming 제 [2편] MAVSDK 활용을 위한 C++ 핵심 문법](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0312_인포그래픽-768x768.jpg)
![PX4 MAVSDK – C++ Programming [9편] 정밀한 드론 제어: 오프보드(Offboard) 모드](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0319_인포그래픽-768x429.jpg)
![[MAVSDK C++ Part 4] Building Your Own App: Project Setup and Drone Connection](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0314_인포그래피-768x512.png)
![PX4 MAVSDK – C++ Programming [Part 3] Installing MAVSDK C++ and Setting Up the SITL Simulation Environment](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0313_인포그래픽-768x419.jpg)
![PX4 MAVSDK – C++ Programming [Episode 7] Moving to a Specific Location (goto_location) and Understanding the Haversine Formula](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0317_인포-768x512.png)