

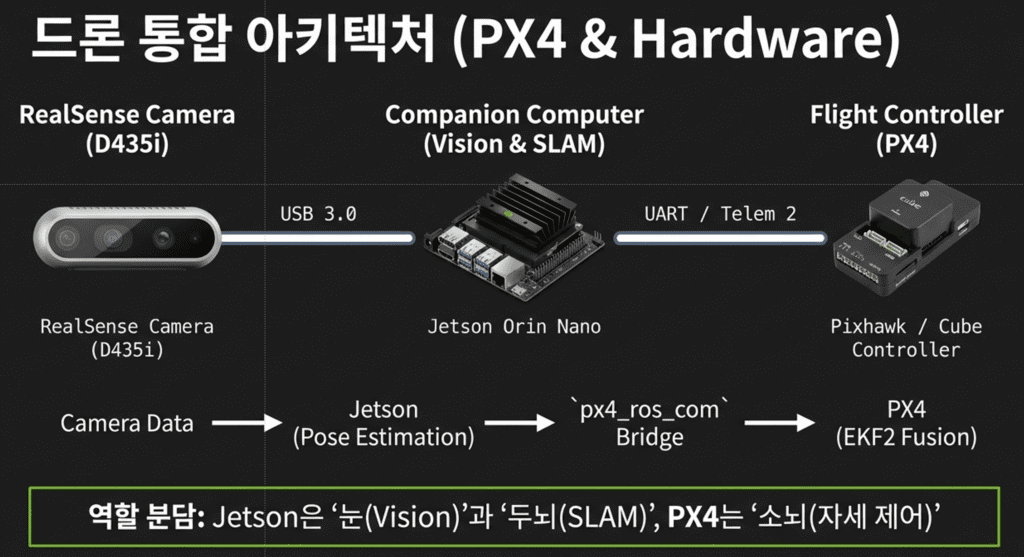
GPS가 끊겨도 드론은 멈추지 않는다: Isaac ROS V-SLAM으로 여는 자율 비행의 신세계
실내 공간이나 거대한 빌딩 숲 사이로 드론을 날려본 적이 있나요? 갑자기 GPS 수신 불가를 알리는 경고등이 켜지고 드론이 흐르기 시작할 때, 조종사가 느끼는 공포는 상상 이상입니다. 하지만 우리는 이제 이 공포에서 해방될 준비를 해야 합니다. 쿼드(QUAD) 드론연구소가 제시하는 해법, Isaac ROS V-SLAM은 드론의 ‘눈(Camera)’과 ‘감각(IMU)’만을 활용해 GPS가 없는 극한의 환경에서도 완벽한 위치 추정을 가능케 합니다. 이 기술이 왜 자율 비행 연구의 판도를 바꾸고 있는지, 전문가의 시선으로 분석해 보겠습니다.

Point 1: 250 fps의 압도적 속도, 세계 최고 수준의 성능을 증명하다
NVIDIA GPU 가속을 통해 실시간 제어의 생명인 초고속·저지연(Low-latency) 연산 성능을 보장합니다.
자율 비행 중인 드론에게 지연 시간은 곧 사고를 의미합니다. Isaac ROS V-SLAM은 GPU 가속을 통해 수백 개의 특징점을 실시간으로 추적하며, 무려 250 fps라는 경이로운 성능을 뽑아냅니다. 단순히 빠른 것을 넘어, 드론의 급격한 기동 속에서도 오차 없는 위치 정보를 피드백한다는 뜻입니다.
특히, 신뢰성을 뒷받침하는 기술적 근거는 국제 벤치마크 데이터에서 확연히 드러납니다.

“VSLAM은 실시간 애플리케이션을 위한 KITTI 시각적 주행 거리 측정/SLAM 평가 2012에서 측정된 최저 평행 이동 및 회전 오류를 보유한 동급 최고의 패키지입니다.”
Point 2: VO에서 SLAM까지, 환경의 한계를 넘는 기술 프레임워크
시각 정보와 관성 센서의 결합, 그리고 재투영 오차 최소화를 통해 완벽한 지도를 완성합니다.
복잡한 개념처럼 들리지만, Isaac ROS VSLAM의 구조는 매우 논리적입니다. 초보 연구자부터 전문가까지 반드시 이해해야 할 세 가지 핵심 단계를 정리해 드립니다.
- VO (Visual Odometry): 연속된 이미지 프레임의 특징점을 비교해 이동 거리를 계산합니다.
- VIO (Visual-Inertial Odometry): 특징점을 잡기 힘든 **단색 벽면(Solid colored wall)**이나 어두운 복도에서는 시각 정보만으로 한계가 있습니다. 이때 IMU(관성 측정 장치) 데이터를 결합해 움직임을 보완하며 끊김 없는 위치 추정을 유지합니다.
- SLAM (Simultaneous Localization and Mapping): 이동하며 지도를 그리는 동시에 자신의 위치를 잡습니다. 특히 루프 폐쇄(Loop Closure) 기술은 이전에 방문한 장소를 인식할 때 재투영 오차(Reprojection error)를 최소화하여 누적된 오차를 획기적으로 교정하고 지도의 정밀도를 극대화합니다.
Point 3: 드론에게 V-SLAM이 ‘보조’가 아닌 ‘생존 필수’인 이유
바퀴가 없는 드론에게 VSLAM은 유일하고 강력한 기본 주행 거리계(Primary Odometry) 역할을 수행합니다.
지상 로봇은 바퀴의 회전수를 측정하는 ‘휠 오도메트리’라는 확실한 기준이 있습니다. 하지만 공중에 떠 있는 드론에게는 그런 기준이 존재하지 않습니다. 따라서 입체 카메라(Stereo Camera)를 통해 3D 모션을 추정하는 VSLAM은 드론이 자신의 위치를 파악할 수 있는 가장 강력한, 때로는 유일한 **기본 주행 거리계(Primary Odometry)**가 됩니다. 이것이 바로 드론 연구에서 Isaac ROS가 선택이 아닌 필수인 이유입니다.
Point 4: 리얼센스의 한계를 넘는 NVIDIA의 묘수, ‘스플리터(Splitter)’
교차 프레임(Interleaved frames) 방식을 통해 깊이 정보와 위치 추정 성능을 동시에 확보합니다.
Intel RealSense 카메라를 사용하면 딜레마에 빠지게 됩니다. 정확한 깊이(Depth) 인식을 위해 쏘는 적외선 패턴이 VSLAM의 시각적 특징점 추적을 방해하기 때문입니다. NVIDIA는 이를 ‘RealSense Splitter’ 노드로 해결했습니다.
이 노드는 교차 프레임(Interleaved frames) 기법을 사용하여, 적외선 프로젝터가 켜진 프레임은 NVBloX(장애물 인식)로 보내고, 프로젝터가 꺼진 깨끗한 프레임은 VSLAM(위치 추정)으로 분기 처리합니다. 하드웨어의 물리적 한계를 소프트웨어적 알고리즘으로 극복한 놀라운 해법입니다.

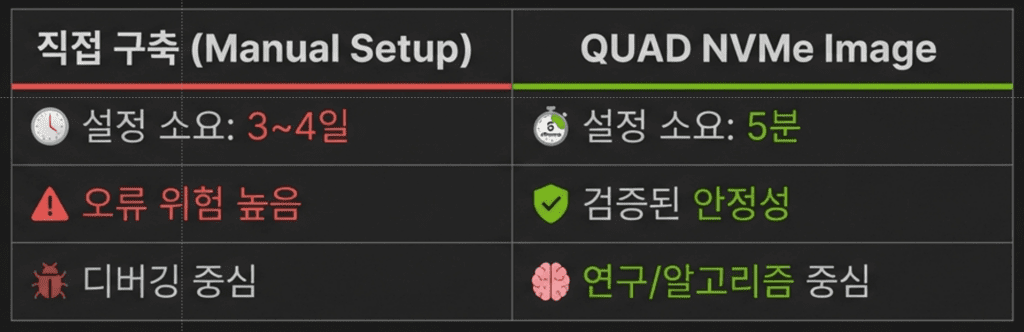
Point 5: 쿼드(QUAD) 드론연구소 NVMe 이미지 – 설치의 고통에서 해방되다
터미널 한 줄로 VSLAM, 통신, 시각화 스택을 일괄 실행하는 압도적인 개발 편의성을 제공합니다.

아무리 훌륭한 기술도 환경 구축에 며칠씩 걸린다면 연구의 동력은 떨어지기 마련입니다. 쿼드(QUAD) 드론연구소의 전용 NVMe 이미지는 이 과정을 혁신적으로 단축합니다. 오리지널 소스에는 없는 ‘통합 런치 파일’ 덕분에, 터미널 한 줄만으로 다음의 복잡한 스택을 즉시 구동할 수 있습니다.
- Isaac ROS VSLAM 및 RealSense 노드 최적화 실행
- MicroXRCEDDSAgent 및 px4_bridgy: 비행 컨트롤러(FC)와의 완벽한 통신 환경 구축
- px4_visualizer: 실시간 데이터 모니터링
- Foxglove Bridge: 별도의 복잡한 설정 없이 Foxglove Studio를 통해 드론이 바라보는 세상을 직관적인 3D로 시각화
이제 여러분은 설치의 고통에서 벗어나, 곧바로 자율 비행 알고리즘의 본질에 집중할 수 있습니다.
——————————————————————————–
결론: 당신의 드론이 스스로 길을 찾기 시작할 때
NVIDIA Isaac ROS VSLAM의 강력한 연산 성능과 쿼드(QUAD) 드론연구소의 사용자 친화적 솔루션이 결합되어, 이제 드론 자율 주행 연구의 문턱은 그 어느 때보다 낮아졌습니다. GPS라는 외부 가이드 없이, 드론이 오직 자신의 감각만으로 복잡한 미로를 이해하고 통과하는 시대가 열린 것입니다.
마지막으로 질문을 던져봅니다. 여러분의 드론이 GPS라는 가이드 없이, 오직 자신의 시각만으로 복잡한 미로를 통과하는 첫 번째 순간은 언제일까요? 그 혁신의 여정에 Isaac ROS가 함께할 것입니다.

Author: maponarooo, CEO of QUAD Drone Lab
Date: February 7, 2026
![[PX4 Tuning Series 6] Trajectory Generator and Setpoint Tuning: The Art of Flight Feel and Smooth S-Curves](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Drone-Trajectory-Comparison-768x429.png)
![[PX4 Tuning Series 7] Land Detector Configuration: The Essential Guide for a Perfect Flight Conclusion](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Drone-Ground-Contact-Landing-Logic-768x429.png)