
Pixhawk 오픈소스 주간 동향: 2025년 11월 4주차
📣 쿼드(QUAD) 드론연구소 홈페이지 OPEN !!✨✨✨
쿼드(QUAD) 드론연구소의 홈페이지가 오픈 되었습니다.
1. PX4 기술·커뮤니티 동향

1-1. 11월 26일 PX4 Dev Call 핵심 정리
PX4 공식 Dev Call(2025-11-26)에서 공유된 내용들:discuss.px4.io
- 커뮤니티 비행 테스트 팀
- 미국 시카고의 Ascend Engineering 팀이 PX4 커뮤니티 공식 비행 테스트 팀으로 활동.
- GitHub 이슈에서
@PX4PX4PX4PX4/testflights태그, Discord Flight Testing & Log Analysis 채널을 통해 테스트 요청 가능.
- RTK GPS 테스트 계획
- PX4 v1.17 알파(1.17.0-alpha1) 브랜치에서 RTK GPS 기능을 본격적으로 시험할 계획.
- 릴리스 논의
- v1.16.1: 안정 브랜치용 버그 픽스를 backport한 RC2 태그가 이미 컷(cut).
- v1.17.0-alpha1: 차세대 기능을 실험하는 알파 버전이 GitHub에 공개되어 테스트 중.
- uORB 메시지 정의·문서화 개선
- uORB 메시지 정의 파일에서 “주석 정렬(align) vs 단일 공백” 스타일을 두고 논쟁.
- 향후 uORB 문서 파서 개선 및 문서 우선 워크플로를 강화하겠다는 계획이 언급됨.
실무 관점 요약
- 운용/상용 기체: 지금 당장에는 1.16.x 안정 브랜치 사용이 안전한 선택.
- R&D·실험 기체: RTK, 신규 기능 실험은 1.17-alpha 조합을 “별도 실험기”에 올려서 테스트하는 전략이 적절.
- 테스트 아웃소싱: Ascend Engineering 커뮤니티 테스트 팀을 활용하면, 국내에서 만들기 힘든 환경(대형기, 특수 페이로드 등)을 대신 검증해 달라고 요청할 수 있다.
1-2. PX4 Developer Summit 2025 (애틀랜타)
PX4 Developer Summit 2025가 11월 10–11일, 미국 조지아주 애틀랜타에서 개최되었다.LF Events+1
- Dronecode Foundation이 “PX4 생태계의 연례 플래그십 행사”라고 부를 정도로, 이제 하나의 독립된 컨퍼런스급 행사로 자리 잡음.
- 주요 트랙:
- PX4 코어 개발, 시뮬레이션, 안전성·인증
- MAVSDK, QGC, MAVLink 기반 응용
- 상용·연구 기관들의 PX4 도입 사례
한국 개발자/교육자 관점
- 세션 영상·자료가 공개되면,
→ ROS 2 + PX4 강의, 멤버십 강좌, 기업 컨설팅에 바로 재활용 가능. - PX4를 “취미용 오픈소스 FC” 수준이 아니라,
→ **“산업·연구용 표준 스택”**으로 보는 흐름이 더 강해지고 있다.
2. ArduPilot 기술 동향

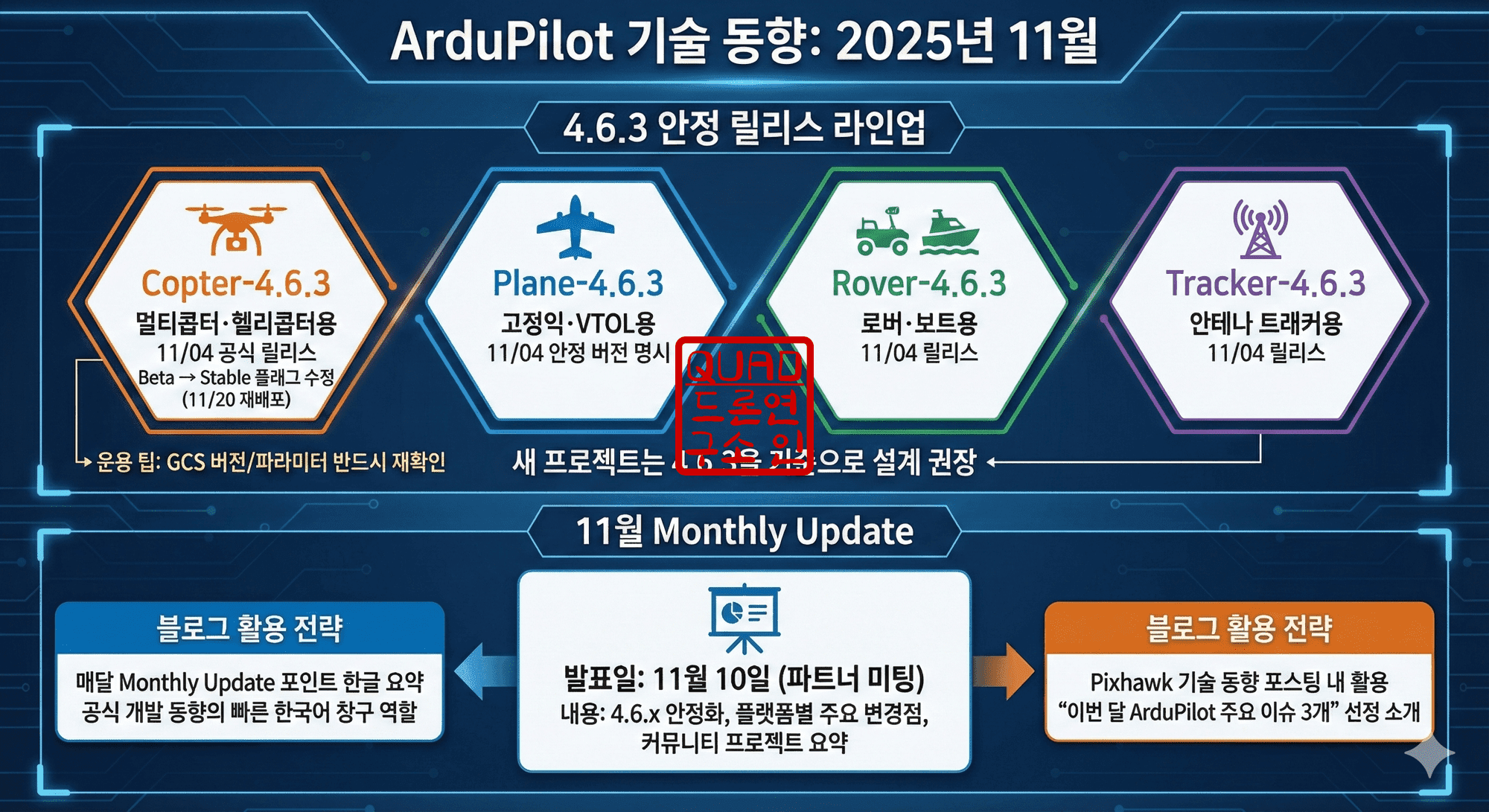
2-1. 4.6.3 계열 안정 릴리스 라인업
ArduPilot은 11월에 주요 플랫폼을 4.6.3 버전으로 정리했다.GitHub
- Copter-4.6.3
- 멀티콥터·헬리콥터용 안정 버전.
- 공식 릴리스일: 2025-11-04
- 초기에 빌드 플래그가 “Beta”로 남아 있어서, 11월 20일에 Stable로 재배포되었다는 주석이 릴리스 페이지에 추가됨.GitHub
- Plane-4.6.3
- 고정익·VTOL용 안정 버전.
- “Plane-4.6.3 was released as the stable version for planes and VTOLs on 04-Nov-2025” 명시.GitHub
- Rover-4.6.3 / Tracker-4.6.3
- 로버·보트, 안테나 트래커용 안정 버전으로 동일한 날 릴리스.GitHub
운용 팁
- 새 프로젝트는 4.6.3을 기준으로 설계하는 게 좋다.
- 특히 Copter 4.6.3는 “Beta → Stable 플래그 수정” 이슈가 있었으므로,
- 펌웨어 업데이트 후 GCS에서 버전 표기와 파라미터 세트를 반드시 다시 확인해야 한다.
2-2. 11월 Monthly Update
- 11월 10일자 ArduPilot Monthly Update for Nov 2025가 파트너 미팅에서 발표되고, 슬라이드가 공개되었다.discuss.ardupilot.org+1
- 내용은 4.6.x 안정화 진행 상황, 각 플랫폼별 주요 변경점, 커뮤니티 프로젝트 등을 요약하는 구조.
3. Pixhawk & 오토파일럿 하드웨어 동향
3-1. Pixhawk 6 계열 재편
- Holybro Pixhawk 6X (Rev3)
- 제품 페이지에 “Product has discontinued. It has been replaced by this new version” 라고 명시.
- 단, 요청 시 추가 생산은 가능하다고 안내.Holybro Store
- Pixhawk 6C
- 여전히 PX4/ArduPilot 양쪽에서 가장 널리 쓰이는 6세대 보드 중 하나
- STM32H743 + Bosch & InvenSense 센서를 사용하고, PX4가 기본 탑재된 상태로 판매.
- Pixhawk 6 세대 FMU 오픈 스펙은 여전히 공개되어 있으며, 호환 보드 설계의 기준점 역할을 한다.
국내 활용 관점
- 6X 기반으로 이미 시스템을 구축한 경우:
- 교육/실험용이면 예비 보드를 지금 확보해 두는 게 안전.
- 앞으로 새 기체·연구 플랫폼 설계:
- Pixhawk 6C, 6X 후속 보드, FMUv6X 호환 보드를 우선 후보로 두고 검토하는 것이 장기 유지보수에 유리.
- 자체 FC 개발을 고민 중인 팀:
- FMU v6 오픈 스펙을 기초로 설계하면 PX4·ArduPilot·QGC와의 호환성을 확보하기 편하다.
4. 드론 오토파일럿 시장·비즈니스 동향
4-1. 글로벌 오토파일럿 시장 성장률
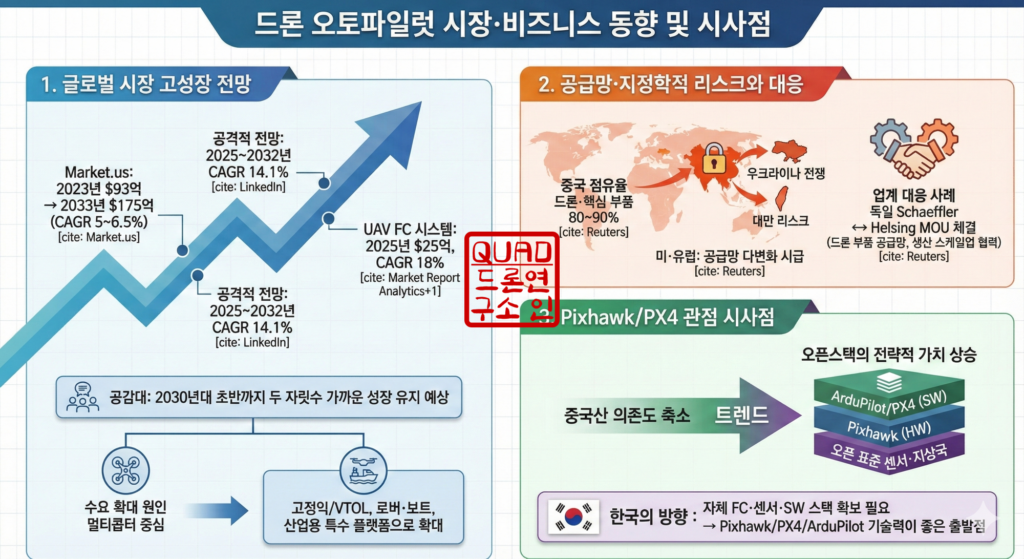
최근 업데이트된 시장 리포트들은 공통적으로 **“향후 10년간 고성장”**을 예측한다.
- Market.us 자료:
- 글로벌 드론 오토파일럿 시장 규모는 2023년 약 93억 달러에서
2033년 175억 달러 수준으로 성장 예상. - 이 리포트는 CAGR(연평균 성장률)을 약 5~6.5% 수준으로 본다.Market.us
- 글로벌 드론 오토파일럿 시장 규모는 2023년 약 93억 달러에서
- 다른 리포트에서는 2025~2032년 기간의 CAGR을 **14.1%**로 보는 공격적인 전망도 존재.LinkedIn
- 또 다른 분석은 2025년 기준 시장 규모를 약 136억 달러로 추정한다.LinkedIn
- UAV Flight Control System 시장만 따로 보면, 2025년 약 25억 달러, CAGR 18% 수준이라는 분석도 있다.Market Report Analytics+1
요약 해석
- 리포트마다 수치·CAGR은 다르지만,
- **“2020년대 후반 ~ 2030년대 초반까지 두 자릿수에 가까운 성장을 유지한다”**는 방향성에는 공감대가 있다.
- 멀티콥터 중심이던 수요가
- 고정익/VTOL, 로버·보트, 산업용 특수 플랫폼까지 플랫폼 전체로 확대되는 것이 핵심 원인.
4-2. 공급망·지정학 이슈
- 한 국제 기사에 따르면,
- 드론과 희토류·핵심 부품에서 중국이 80~90% 수준의 점유율을 차지하고 있으며,
- 우크라이나 전쟁과 대만 리스크로 인해 미·유럽이 공급망 다변화를 서두르고 있다는 분석이 나왔다.Reuters
- 독일에서는 자동차 부품 업체 Schaeffler가 방산 테크 기업 Helsing과 드론 개발 협력 MOU를 체결했다.
- 드론 시스템용 부품 공급, 공급망 구축, 생산 스케일업을 목표로 한다.Reuters
Pixhawk/PX4 관점 시사점
- 서방 국가 입장에서는 “중국산 드론/부품 의존도 축소”가 강한 트렌드다.
- 이 흐름과 맞물려,
- **오픈스택(ArduPilot·PX4 + Pixhawk 하드웨어 + 오픈 표준 센서·지상국)**의 전략적 가치가 더 커지는 중.
- 한국도 결국
- 완제품·부품의 중국 의존을 줄이고
- 자체 FC·센서·소프트웨어 스택을 확보하는 방향으로 갈 가능성이 높다.
- 이때 Pixhawk 오픈 스탠더드와 PX4/ArduPilot 기술력은 좋은 출발점이 된다.
5. 응용·신기술: AI 자율비행과 전장 활용
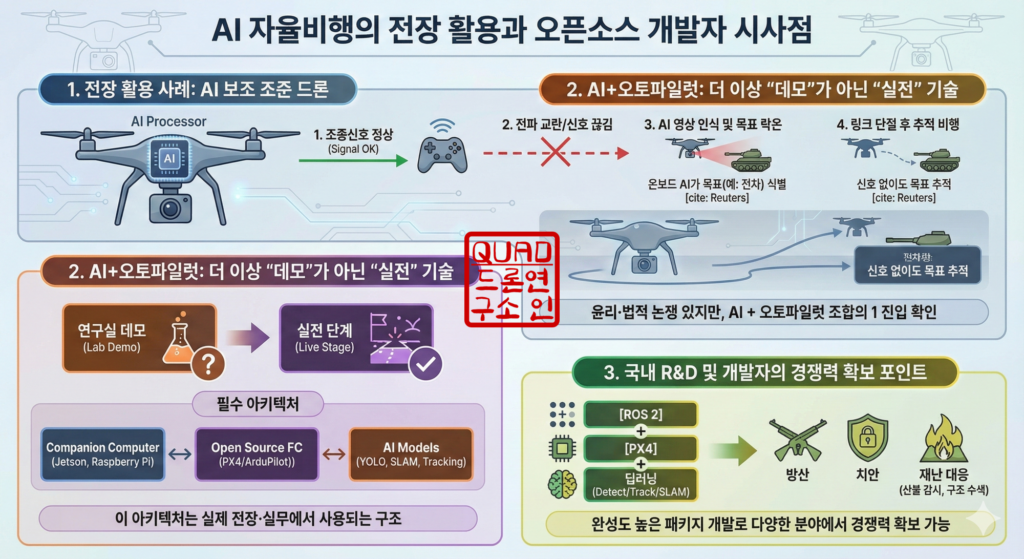
- 최근 보도에 따르면, 우크라이나군은 AI 보조 조준 시스템을 탑재한 드론을 실제 전장에 활용하고 있다.Reuters
- 러시아의 전파 교란 때문에 조종신호가 끊겨도,
- 드론이 영상 기반으로 목표(예: 전차)를 인식·락온한 뒤,
- 링크가 끊겨도 목표를 추적해 비행하도록 설계.
- 윤리·법적 논쟁(“AI 무기화”)은 있지만,
- 온보드 AI + 오토파일럿 조합이 이미 실전 단계에 접어들었다는 게 핵심.
Pixhawk/오픈소스 FC 개발자에게 의미하는 것
- Jetson/Orin, Raspberry Pi 같은 컴패뇬 컴퓨터 + PX4/ArduPilot + YOLO/SLAM/Tracking 구조는
- 더 이상 “연구실 데모”가 아니라 실제 전장·실무에서도 쓰이는 구조다.
- 국내 R&D 포인트:
- ROS 2 + PX4 + 딥러닝(Detect/Track/SLAM)을 묶은 완성도 높은 패키지를 만들면,
- 방산·치안·재난(산불 감시, 구조 수색) 영역에서 경쟁력이 생긴다.

작성자: 마포나루 (QUAD Drone Lab. 대표)
기고일: 2025-12-03
주) 본문에 사용된 이미지의 저작권 표시가 제거된 원본이 필요하신 분은 maponarooo@naver.com 으로 연락 주시기 바랍니다.
![[드론 배터리의 모든 것]Part 3: 고전압 시스템으로의 진화: 6S, 8S, 그리고 12S의 세계](https://quad-drone-lab.co.kr/wp-content/uploads/2026/05/Inside-the-Intelligence-Battery-Diagram-768x429.png)
![[PX4 튜닝 시리즈 7] 착륙 감지기 설정 (Land Detector Configuration): 완벽한 비행의 마무리를 위한 필수 가이드](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Drone-Ground-Contact-Landing-Logic-768x429.png)
![[PX4 튜닝 시리즈 부록] 레이싱 드론 튜닝 가이드 (Racer Setup): 한계를 뛰어넘는 극강의 퍼포먼스](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Racing-Drone-Minimalism-and-Balance-768x429.png)
![[ROS2 Mastery 2편] ROS2 핵심 통신 개념 및 강력한 유틸리티 ‘RQT’ 활용법](https://quad-drone-lab.co.kr/wp-content/uploads/2026/05/0505_인포그래픽-768x419.jpg)