
PX4 MAVLink-Python 프로그래밍: 6.비행 모드 (PX4 멀티콥터)
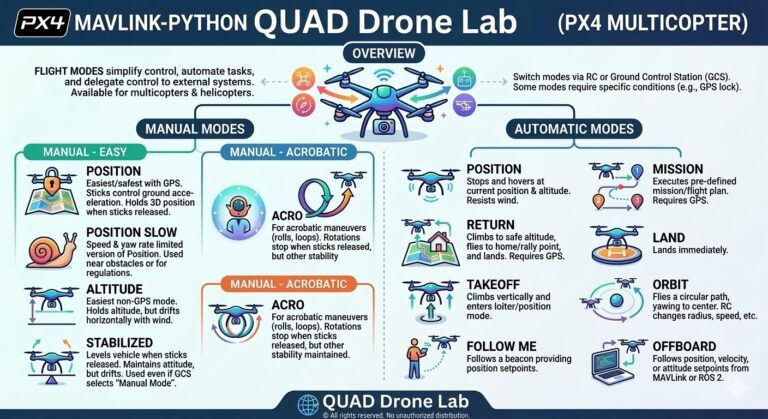
안녕하세요. 마케팅팀 에이든(Aiden)입니다. 오늘 소개해드릴 내용은 PX4 MAVLINK-PYTHON 프로그래밍 – 비행모드(PX4 멀티콥터)입니다. 해당 내용은 저희 QUAD 드론 연구소의 저작권으로 등록되어있는 내용이며 무단 배포는 지양해주시길 부탁드립니다. 비행 모드는 자동 조종 기능을 지원하여 차량을 수동으로 조종하고, 이륙 및 착륙과 같은 일반적인 작업을 자동화하고, 자율 임무를 실행하거나 비행 제어를 외부 시스템에 위임하는 작업을 더 쉽게 해줍니다. 이 주제에서는 멀티콥터와…