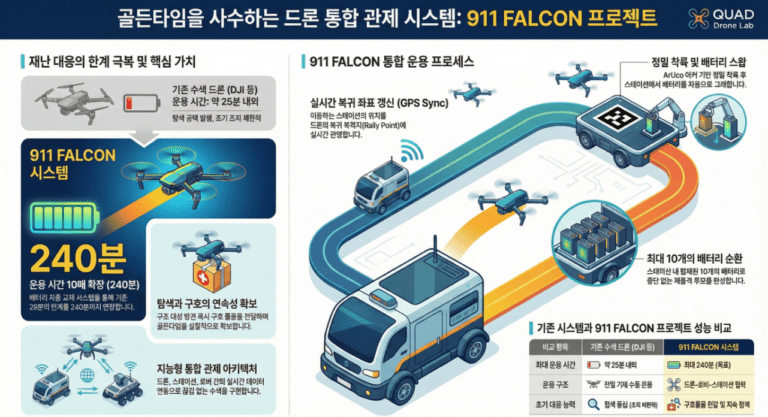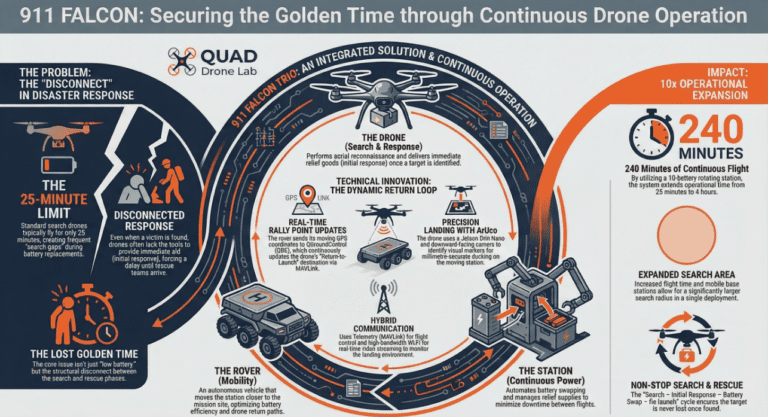
System Communication Architecture for Search-Drone Return : 911 FALCON Project
Hello, this is QUAD Drone Laboratory.I’m Geunchan Lee, Senior Researcher at QUAD Drone Lab. In Week 1, I summarized the background behind launching the 911 FALCON project and outlined the operational concept we designed to address field limitations—namely short flight time and the lack of immediate response capability.In Week 2, I will introduce the system…