

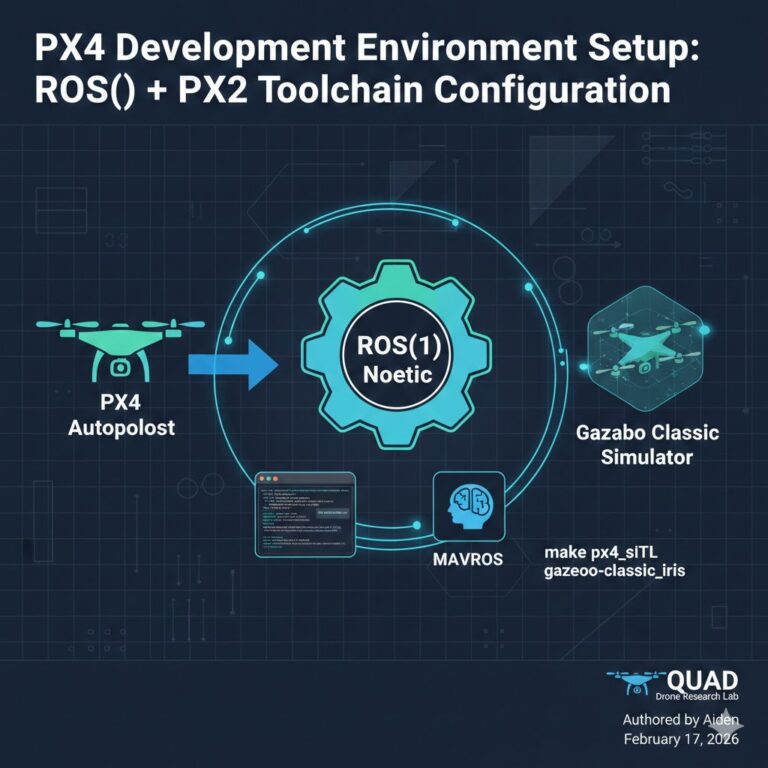
PX4 개발환경 구성 – Gazebo Classic 시뮬레이터 사용하기
안녕하세요. 마케팅팀 에이든(Aiden)입니다. 이어서 PX4 개발환경 구성 그 중에서도 Gazebo Classic 시뮬레이터 사용법에 대해 소개해드리려 합니다. 해당 내용은 저희 QUAD 드론 연구소의 저작권으로 등록되어있는 내용이며 무단 배포는 지양해주시길 부탁 드립니다. Gazebo Classic은 객체 회피 및 컴퓨터 비전 테스트에 특히 적합한 자율 로봇을 위한 강력한 3D 시뮬레이션 환경입니다. 이 페이지에서는 SITL 및 단일 차량에서의 사용에 대해…


![[Seminar Review] AI-Powered Pixhawk (PX4) Autonomous Flight Training at Goheung Drone Center](https://quad-drone-lab.co.kr/wp-content/uploads/2026/02/Snapshot_4-768x432.png)