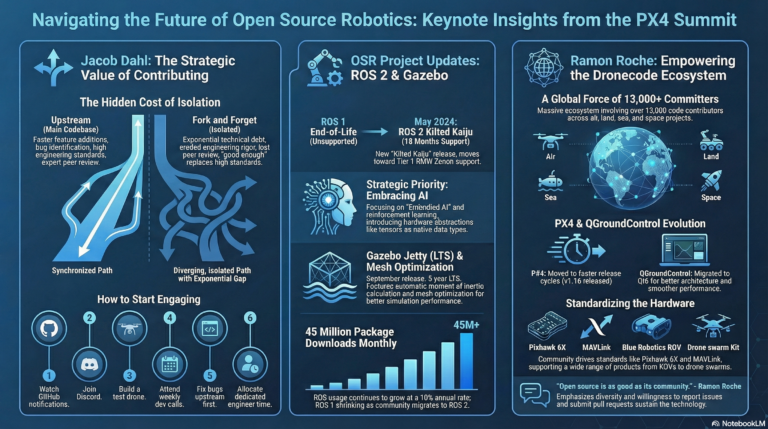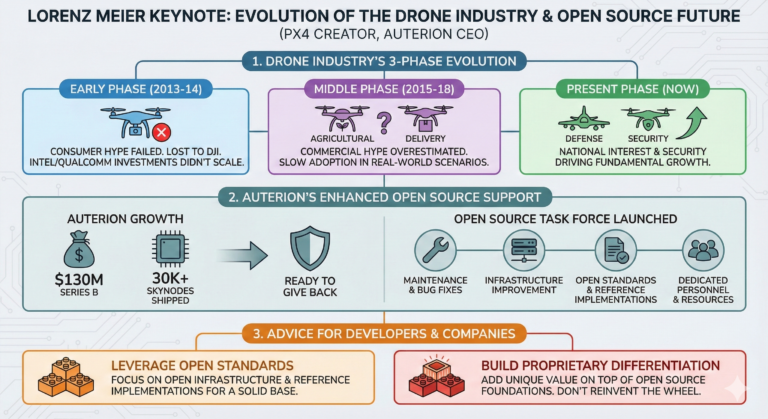
2025 PX4 Developer Summit Review – Part.2: Keynote by Lorenz Meier
Keynote by Lorenz Meier The weather has grown quite cold as Christmas approaches. I hope all our subscribers are staying healthy and avoiding the flu. In today’s post, I want to recap the ‘2025 PX4 Developer Summit’ held in Atlanta, USA, from November 10-11. This content was previously featured on our YouTube channel’s series, “Pixhawk…