PX4 MAVLink-Python 프로그래밍: 2. Python MAVLink 라이브러리 사용
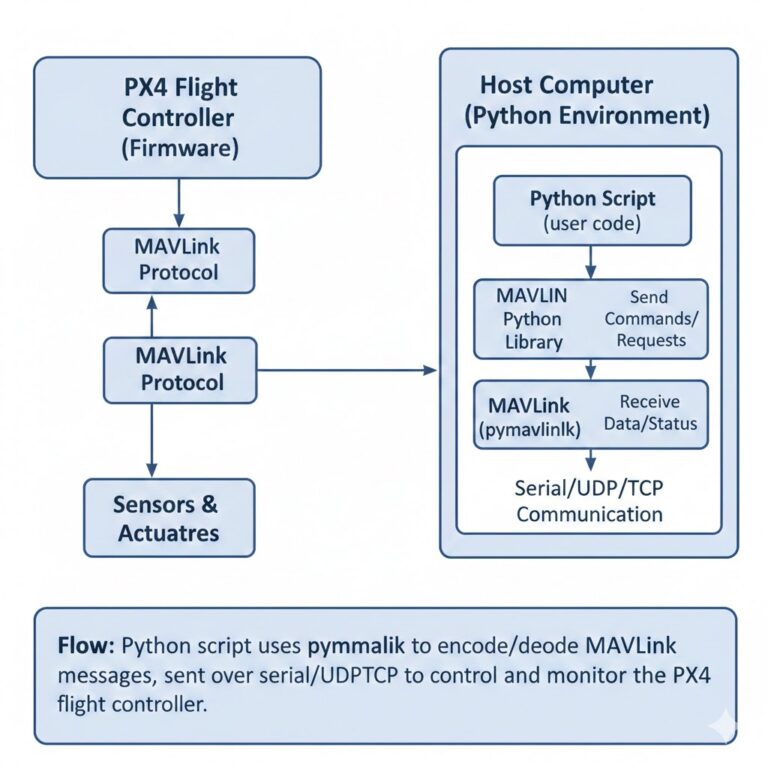
안녕하세요. 마케팅팀 에이든(Aiden)입니다. 오늘은 PX4 MAVLINK-PYTHON 프로그래밍 그 중에서도 Python MAVLink 라이브러리 사용에 대해 소개해드리려 합니다. 해당 내용은 저희 QUAD 드론 연구소의 저작권으로 등록되어있는 내용이며 무단 배포는 양해주시길 부탁 드립니다. Python MAVLink 라이브러리 사용 개요 pymavlink 패키지에는 메시지를 인코딩 및 디코딩하고 서명을 적용 및 확인하는 저수준 기능을 제공하는 언어별 생성 모듈이 포함되어 있습니다. pymavlink 패키지 의 모듈 세트는 다음과…