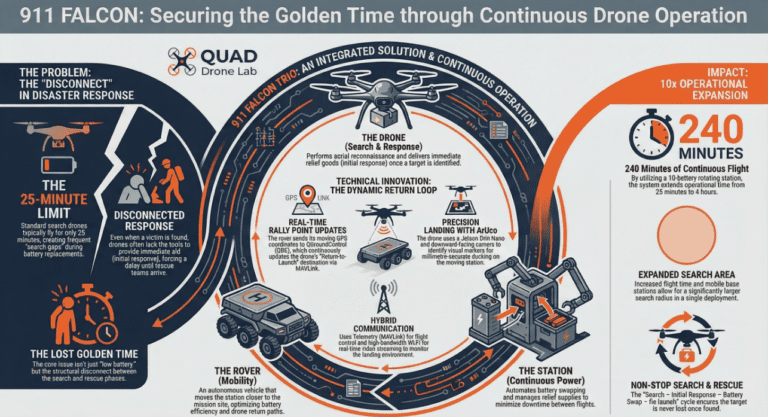
드론 자재 선정 – 전원부 : 911 FALCON 프로젝트
안녕하세요, 쿼드(QUAD) 드론연구소의 이근찬 선임연구원입니다.
지난 편에서는 911 FALCON 드론의 추력부 선정 과정을 정리해 보았습니다. 임무 요구조건을 KPI로 먼저 고정한 뒤, Iteration(반복 수렴) 방식으로 프레임/프로펠러 체급 결정, 타깃 AUW 수립, 모터·ESC·배터리를 단계적으로 수렴해 나간 흐름을 공유드렸습니다.
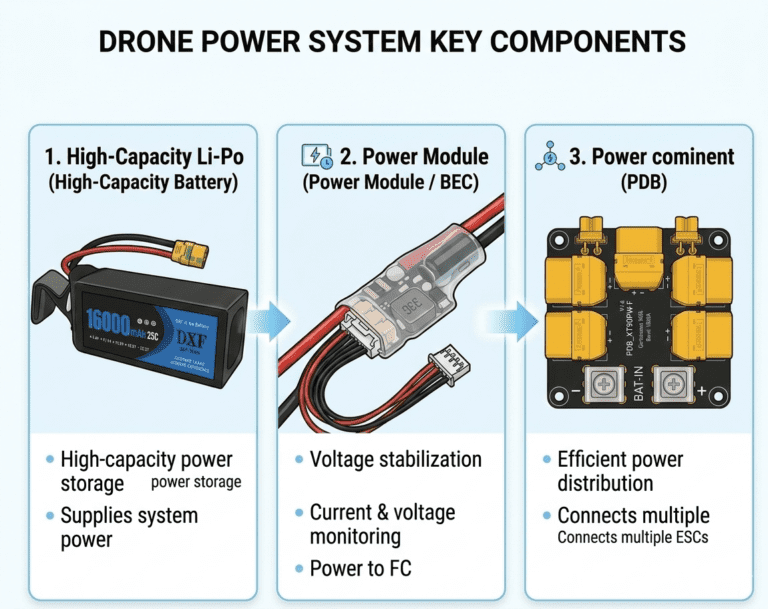
이번 편에서는 그 다음 단계로, 추력부가 안정적으로 동작할 수 있도록 뒷받침하는 전원부(Power System)를 다루겠습니다. 이번 글에서는 배터리, 파워모듈, PDB를 어떤 기준으로 선정했고, 마지막으로 각 장치에 전원이 어떤 경로로 공급되는지까지 함께 정리해 보겠습니다.

전원부 설계 목표
시작으로 임무 요구조건을 먼저 정의했습니다. 목표는 구호 POD를 투하한 뒤에도 안정적으로 복귀해, 운용 루프 911 FALCON의 전원부는 단순히 “전기를 넣는 구조”가 아니라, 아래 조건을 동시에 만족해야 합니다.
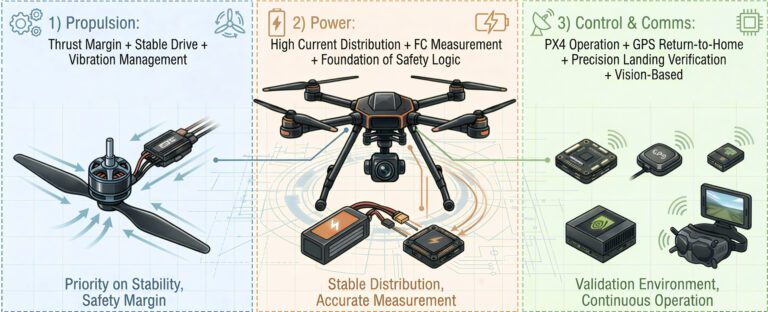
- 추력부(모터/ESC)에 필요한 고전류 전원을 안정적으로 공급할 것
- 비행제어기(FC)가 배터리 상태를 정확히 계측할 수 있을 것
- 반복 운용(복귀–착륙–재출격) 과정에서 전원 계통의 신뢰성과 정비성을 확보할 것
즉, 이번 전원부 설계의 핵심은
배터리 → 전원 분배 → 전압/전류 계측 → 장치별 안정 공급
까지 하나의 구조로 묶는 것입니다.
STEP 1 : 배터리 선정
이번 기체는 추력부 선정 과정에서 6S 전압 체계를 기준으로 설계를 수렴했습니다. 또한 이전 단계에서 배터리 중량 타깃을 약 1.60~2.01kg 범위로 설정했습니다. 이를 바탕으로 배터리 용량 후보군은 6S 16Ah ~ 22Ah 범위로 두고 검토했습니다.
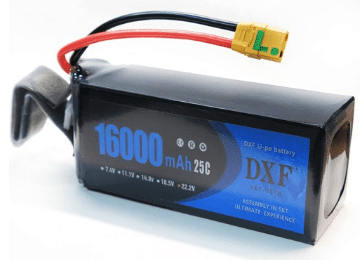
주요 스펙
- 크기: 185 × 76 × 66mm
- 전압: 22.2V (6S)
- 용량: 16000mAh
- 방전율: 25C
- 커넥터: XT90
- 무게: 약 2000g
16000mah 배터리 선정 사유: 용량 후보군은 16Ah~22Ah였지만, 최종 확정은 단순히 “용량이 큰 배터리”를 고르는 방식으로 접근하지 않았습니다. 운용시간은 결국 배터리 용량만이 아니라, AUW(총중량)와 호버 효율(W/kg)의 영향을 함께 받기 때문입니다.
22000Ah급 배터리는 이론적으로 더 긴 운용시간을 기대할 수 있지만, 동시에 배터리 자체의 중량이 증가하면서 AUW가 상승하고, 그에 따라 호버 전력도 증가하게 됩니다. 즉, 용량을 키우는 것이 운용시간 증가로 그대로 이어지지 않을 가능성이 있습니다.
반면 6S 16000mAh 배터리는 약 2.0kg 수준으로, 앞 단계에서 설정한 배터리 중량 타깃 범위와 정합합니다. 따라서 이번 설계에서는 16Ah급 배터리를 우선 확정하고, 이후 실제 운용에서 호버 전력과 W/kg를 실측해 필요 시 상위 용량으로 확장하는 전략을 선택했습니다.
STEP 2 : 파워모듈 선정
파워모듈은 배터리 전원을 기반으로 비행제어기(FC)에 안정적인 전원을 공급하고, 동시에 배터리 전압과 전류를 계측하는 역할을 담당합니다. 전원 구조 상 ESC 구동 전원은 PDB를 통해 공급되고, 파워모듈은 FC 전원 공급과 전력 계측을 담당하는 전원 관리 계층으로 구성됩니다.

파워모듈 선정 기준
이번 기체의 추력부는 MN5212 KV420 모터와 15인치 프로펠러 조합으로 구성되어 있습니다. 벤치 데이터 기준으로 모터 1개당 최대 전류는 약 36.7A 수준이며, 쿼드 구성 기준 최대 스로틀 구간에서는 전체 전류가 약 140A 이상까지 상승할 수 있습니다.
따라서 전원 계측 장치는 이러한 전류 환경에서도 안정적으로 동작할 수 있는 충분한 계측 범위와 전원 안정성을 확보해야 합니다.
Holybro PM02D 파워모듈은
- 6S 배터리 전압 체계 지원
- Pixhawk 계열 FC와 호환되는 6핀 전원 인터페이스
- 비행 로그 기반 전압·전류 모니터링 지원
과 같은 특징을 가지고 있어, 이번 기체의 전원 구조와 운용 환경에 적합한 구성이라고 판단했습니다.
파워모듈은 단순 전원 공급용 부품이 아니라 비행 안정성과 임계치 기반 안전 로직의 기준이 되는 계측 장치라고 볼 수 있습니다. FC가 전압과 전류를 정확하게 인식해야만 설정된 전압 구간에서 저전압 경고, RTL 동작, 비상 복귀 로직이 안정적으로 수행될 수 있기 때문입니다.
STEP 3 : PDB(Power Distribution Board) 선정
PDB는 메인 배터리 전원을 각 ESC에 안정적으로 분배하고, 기체 내부의 고전류 배선을 구조적으로 정리하는 역할을 담당합니다. 이번 기체는 15인치급 추력계를 기반으로 설계되었기 때문에, 단순 병렬 배선보다 고전류 전원 분배를 보드 단위로 정리하는 구조가 필요했습니다. 이에 따라 911 FALCON에서는 PDB(Power Distribution Board)를 적용해 ESC 전원 계통을 구성했습니다.

PDB 선정 기준
이번 기체의 모터 1개당 최대 전류는 약 36.7A 수준입니다. 따라서 쿼드 구성 기준 최대 스로틀 구간에서의 전체 최대 전류는 약 140A 수준으로 계산됩니다. 여기에 실운용 과정에서의 발열, 환경 변동, 순간 피크 전류를 고려해 운용 마진 1.3~1.5를 적용하면, 전원 분배 구조는 최소 약 210A 이상을 안정적으로 처리할 수 있어야 한다고 판단했습니다. 또한 이번 기체는 메인 전원 구조를 XT90 플랫폼으로 구성하고, 주변 장치에는 XT30 커넥터를 통한 보조 전원 공급이 가능해야 했습니다. 이러한 조건을 종합적으로 고려해, 충분한 전류 여유와 전원 분배 구조를 갖춘 Holybro 300A PDB를 최종 선정했습니다.
STEP 4 : 장치별 전원 공급 구조
전원부 설계의 마지막 단계는, 각 장치가 어떤 경로로 전원을 공급받는지 명확하게 정리하는 것입니다. 이번 기체는 전원 공급 구조를 FC / ESC / VTX / Jetson Orin Nano 기준으로 아래와 같이 구성했습니다.
4-1) FC (Flight Controller)
비행제어기 Pixhawk 6X는 파워모듈의 6핀 전원 커넥터를 통해 전원을 공급받습니다.
이 구조를 사용하면 FC 전원을 ESC 구동 전원 계통과 분리할 수 있기 때문에, 전원 노이즈 영향을 줄이고 배터리 전압·전류를 정확하게 계측하는 데 유리합니다. 또한 FC는 파워모듈을 통해 입력된 배터리 상태를 기반으로 저전압 경고, RTL, Fail-safe와 같은 안전 로직을 수행하게 됩니다.
4-2) ESC
ESC는 PDB를 통해 분배된 메인 배터리 전원을 공급받습니다.
즉, 배터리에서 들어온 메인 전원은 먼저 PDB에 입력되고, 이후 각 ESC로 분배됩니다. 이 구조를 통해 4개의 ESC가 필요한 고전류 전원을 안정적으로 공급받을 수 있고, 전원 계통도 구조적으로 정리할 수 있습니다. 이번 기체처럼 15인치급 추력계를 사용하는 경우, ESC 전원선을 단순 병렬로 구성하는 것보다 PDB를 중심으로 전원 구조를 정리하는 편이 더 안정적이라고 판단했습니다.
4-3) VTX (영상 송신기)
영상 송신기(VTX)는 메인 배터리 전압을 직접 사용하는 것이 아니라, BEC를 통해 전압을 강압한 뒤 OSD 모듈을 거쳐 전원을 공급받는 구조로 구성했습니다.
이번 기체는 6S 배터리 기반으로 구동되기 때문에, VTX에 메인 전압을 그대로 인가하는 대신 24V를 9V로 강압해 사용하는 방식이 더 적합하다고 판단했습니다.
전원 흐름은 다음과 같습니다.
Battery / PDB 메인 전원 → BEC(24V → 9V) → OSD 모듈 → VTX
이 구조를 적용한 이유는, VTX가 안정적으로 동작할 수 있는 전압을 별도로 만들어 공급하고, 동시에 OSD 모듈과의 연동까지 하나의 경로로 정리하기 위해서입니다. 즉, 영상 송신 계통은 단순히 전원을 연결하는 것이 아니라, 전압 조건을 맞춘 뒤 OSD를 거쳐 안정적으로 송신기로 전달되는 구조로 구성했습니다.
4-4) Jetson Orin Nano
온보드 컴퓨팅을 담당하는 Jetson Orin Nano는 배터리 전압을 그대로 사용할 수 없기 때문에, UBEC를 통해 강압한 뒤 전원을 공급하는 구조로 구성했습니다.
전원 흐름은 다음과 같습니다.
Battery (6S) → UBEC → Jetson Orin Nano
이 방식은 6S 배터리의 고전압을 Jetson이 요구하는 안정적인 저전압으로 변환해 주며, 온보드 비전/스트리밍 시스템이 안정적으로 동작할 수 있도록 합니다. Jetson은 하방 카메라 스트리밍과 정밀착륙 검증에 직접 연결되는 장치이기 때문에, 전원 공급 역시 별도의 안정적인 경로로 분리하는 것이 중요했습니다.
전원 구조 요약
이번 기체의 전원 구조는 아래와 같이 정리됩니다.

배터리 → 파워모듈 → 전원분배 PDB → 각 ESC → 각 Motors
↓ ↓ ↓
FC 영상시스템, 잿슨나노
이번 글에서는 911 FALCON 드론의 전원부 선정 과정을 정리해 보았습니다. 기체의 전원 구조는 배터리를 중심으로 각 장치에 맞는 방식으로 전원을 분배하는 구조로 정리할 수 있습니다. 이를 통해 추력계, 비행제어기, 영상 송신기, 온보드 컴퓨팅 장치가 각각 필요한 전압 환경에서 안정적으로 동작할 수 있도록 구성했습니다.
다음 편에서는 드론의 통신 및 제어 구조를 중심으로 FC, GPS, 수신기, 온보드 컴퓨팅 간 데이터 흐름과 시스템 구성을 정리해 보겠습니다. 감사합니다.

작성자: 이근찬, 쿼드(QUAD) 드론연구소 선임연구원
기고일: 2026.03.09