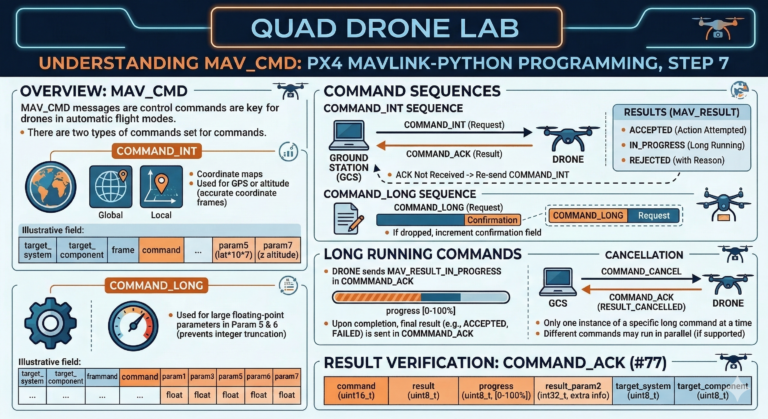
PX4 MAVLink-Python Programming: 7. MAV_CMD
Hello, I’m Aiden from the Marketing Team. Today, I would like to introduce the 7th step of PX4 MAVLINK-PYTHON programming: MAV_CMD. This content is registered as the copyrighted property of our QUAD Drone Lab, so please refrain from unauthorized distribution. MAV_CMD OVERVIEW MAV_CMD Messages is a list of control commands that can be issued to…
![[Reference] What is HMAC-SHA256?](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0308_사진-768x419.jpg)