
[Everything About Drone Batteries]Part 3: The Evolution to High-Voltage Systems: The World of 6S, 8S, and 12S
Hello to all the drone developers and engineers who seamlessly bridge hardware and software to push the boundaries of flight! In our previous installment, we uncovered the hidden truths behind the Discharge Rate (C-Rating) and explored the physical impact that Internal Resistance (IR) has on flight dynamics.
In the third part of our series today, we will dive deep into the most monumental paradigm shift occurring across the drone industry—from small FPV quads to massive industrial platforms: The Evolution to High-Voltage Systems. We will thoroughly examine why upgrading system voltage from 4S to 6S, 8S, and upwards to 12S is far more than a simple power boost. From an engineering perspective, we will break down the practical advantages this brings to overall efficiency, Electronic Speed Controller (ESC) stability, and firmware integration (such as PX4 and ArduPilot).
1. Why High-Voltage Systems?: The Physics of Electrical Efficiency and I²R
As the payload capacity and required flight endurance of drones increase, the total power (Watts, W) demanded by the propulsion system rises exponentially. As you well know, the fundamental formula for electrical power is P=V×I.
Imagine a scenario where your drone requires 2,000W of thrust to hover. If your system voltage (V) is low, you inevitably have to pull a massive amount of current (I) from the battery. The core problem lies here. Every component—the drone’s wiring, connectors, the MOSFETs in the ESCs, and the motor windings—possesses a minute amount of internal resistance (R). When current flows, the power lost as wasted heat (Joule Heating) is determined by the following formula:
Heat Loss (Ploss) = I2×R
Notice that heat loss is proportional to the ‘square’ of the current. This means if you double the voltage, you cut the required current in half, which in turn slashes your heat generation and energy loss not just by half, but down to one-quarter (1/4).
For a developer, adopting a high-voltage system triggers a chain reaction of massive benefits:
- Wiring Weight Reduction: The heavy 8AWG wires needed to handle massive currents can be slimmed down to 10AWG or 12AWG, significantly reducing the overall weight of the aircraft.
- Reduced ESC Stress: The thermal load applied to the switching components (MOSFETs) of the ESC drops dramatically, virtually eliminating the risk of thermal cutoffs or mid-air fires caused by overheating.
- Minimized Voltage Sag: The internal voltage drop within the battery during aggressive throttle punch-outs is drastically reduced, allowing the drone to maintain consistent thrust even in the later stages of flight.

2. The New Standard for 5-Inch FPV and Small Drones: 6S (22.2V)
Just a few years ago, the absolute standard for developing 5-inch freestyle or racing drones was the 4S (14.8V) system. Today, however, almost the entire ecosystem has migrated to 6S (22.2V, 25.2V fully charged).
[6S Tuning Points for Developers] When migrating a drone from a 4S to a 6S powertrain, the current supplied to the motors drops significantly. From the perspective of the Flight Controller (FC), this means the throttle response becomes remarkably sharper and far more linear. It becomes vastly easier to manage Prop Wash (the turbulent wobbling during a rapid descent), and developers gain a much wider margin when tuning the D-term (Derivative) in the PID controller loop. Recently, the industry trend has shifted towards pairing 6S setups with 1000mAh to 1300mAh LiHV (High-Voltage Lithium Polymer, 4.35V per cell) batteries, effectively maximizing energy density while maintaining a lightweight footprint.
3. The Realm of Extreme Power and Cinelifters: 8S (29.6V) and Molicel P45B
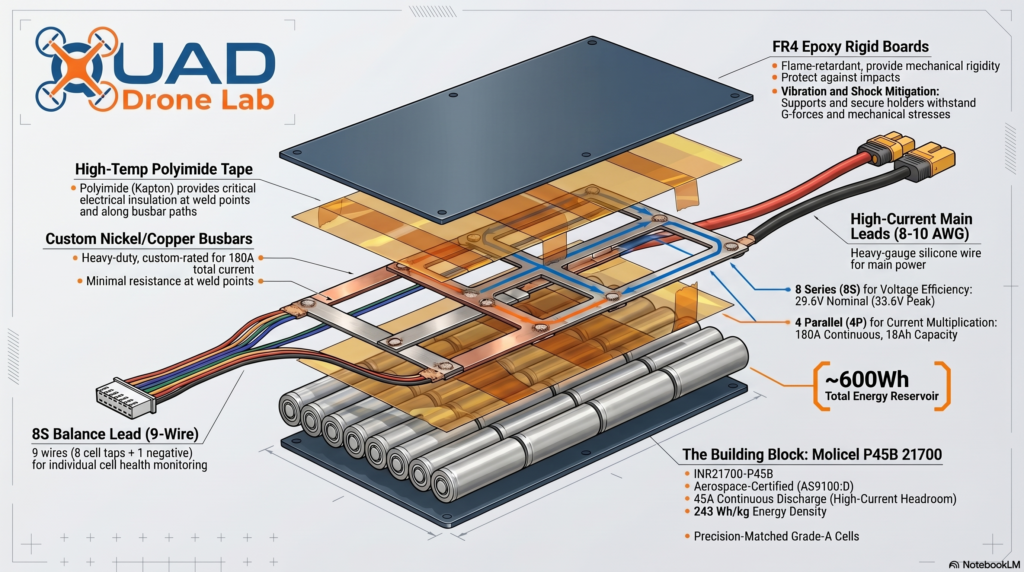
For developers building Cinelifters designed to carry heavy, expensive cinema cameras (like RED or ARRI) through acrobatic maneuvers at over 100 km/h, or those designing large X8 coaxial arrays, the 8S (29.6V nominal, 33.6V max) system has become the architecture of choice.
When custom-designing packs in this high-performance tier, the Molicel P45B (INR21700-P45B) is currently the undisputed king of cells.
- Superior Specs: This 21700 form-factor cylindrical cell boasts an impressive energy density of approximately 243 Wh/kg while supporting an extreme 45A continuous discharge rate.
- 8S4P Custom Architecture: By configuring these cells in an 8S4P array (8 in series, 4 in parallel), developers use 32 cells to create a monstrous battery pack with an 18Ah capacity capable of delivering a staggering 180A of continuous discharge.
- Reliability: Because Molicel cells hold AS9100:D (Aerospace Quality Management System) certification, developers can confidently guarantee reliability for aircraft carrying highly expensive payloads.
When designing 8S battery packs, developers must focus heavily on structural integrity and conductivity. To deliver explosive current without bottlenecks, it is critical to spot-weld pure copper sandwich nickel busbars and utilize robust FR4 epoxy boards to ensure structural rigidity.
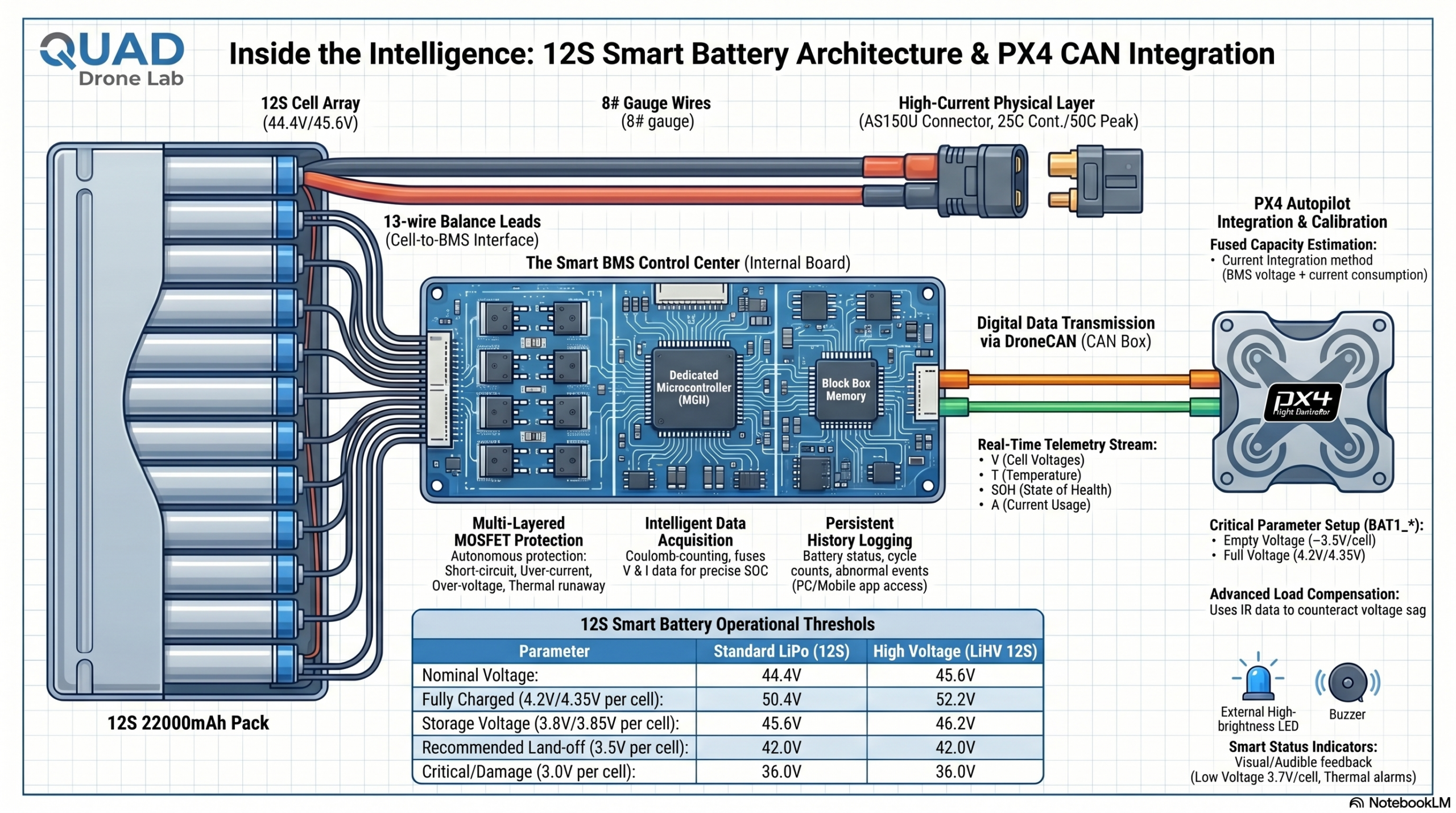
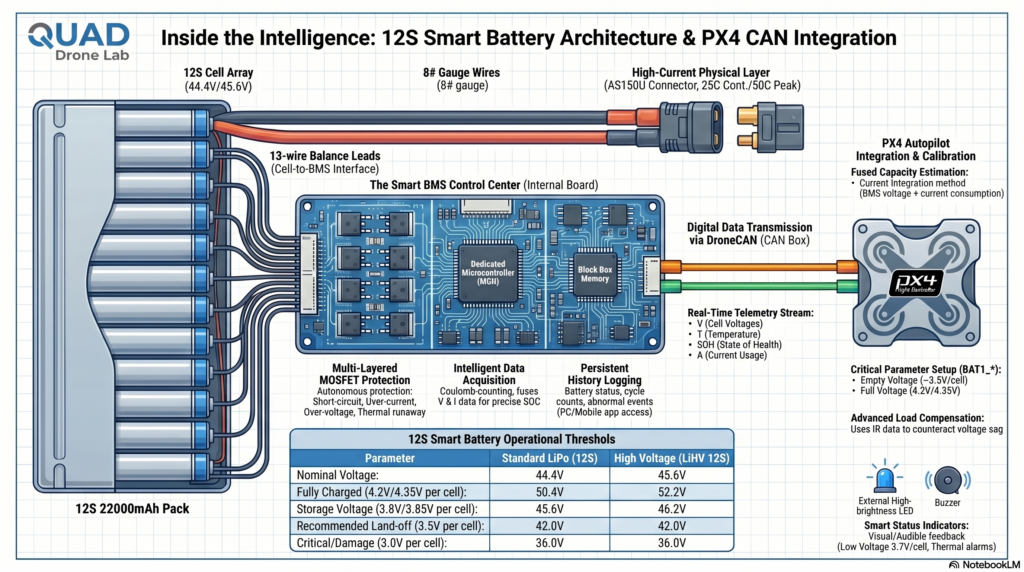
4. The Industrial Standard for Large Agricultural Drones: 12S (44.4V) and Smart BMS
In the realm of agricultural spraying, logistics delivery, and long-range mapping drones with a Maximum Takeoff Weight (MTOW) approaching 20kg to 50kg, the 12S (44.4V nominal, 50.4V max) system is the unshakable industrial standard. At this weight class, a battery is no longer just a bundle of cells; the software integration of a Smart Battery Management System (BMS) becomes the core focus of development.
[The Dramatic Reduction of Current] To illustrate, if a drone consumes 2,000W of power, a 4S system forces a punishing 135A of current through the ESCs. In stark contrast, a 12S system requires only 45A to do the exact same amount of work. This singular change exponentially elevates the stability of the entire hardware system.
[Integrating Tattu 12S Smart Batteries with the FC (PX4/ArduPilot)] Industrial 12S packs (e.g., Tattu 12S 22000mAh) are embedded with powerful BMS microchips. A drone developer’s job goes far beyond merely supplying power; they must integrate the battery with the Flight Controller (FC) using communication protocols like CAN Bus or SMBUS.
- Intelligent Communication: Firmware like PX4 or ArduPilot can fetch real-time telemetry from the BMS, including individual cell voltages, current temperatures, State of Health (SOH), and charge/discharge cycle counts. This data is utilized to calculate highly precise ‘Return to Home’ (RTH) estimations.
- Anti-Spark Design: Plugging a massive 50V 12S battery into an ESC can generate a terrifying, connector-destroying spark. Smart batteries utilize internal BMS coordination and anti-spark resistors built into connectors (like the AS150U) to completely eliminate this hazard.
- Smart Storage Mode: Even if a developer accidentally leaves a fully charged battery on the bench after testing, the BMS will detect a 5-day period of inactivity. It will then automatically engage internal resistors to slowly discharge the cells down to a safe 3.8V storage voltage. This is the ultimate failsafe against LiPo swelling (puffing).
5. Simulating High-Voltage System Efficiency with Python
As a drone developer, when you are in the initial phases of designing a new aircraft’s powertrain, it is absolutely essential to pre-calculate the expected current draw and the relative heat loss (I2) applied to your cables and ESCs based on your target voltage.
The Python example code below is designed to help developers intuitively simulate and visualize the efficiency improvements gained by altering the series (S) configuration under a constant power load.
import matplotlib.pyplot as plt
import pandas as pd
import numpy as np
# Set font for English display (Modify based on your OS environment)
plt.rcParams['font.family'] = 'sans-serif'
plt.rcParams['axes.unicode_minus'] = False
def simulate_hv_efficiency(target_power_w):
"""
Simulates the required current (A) and relative heat loss factor (I^2)
based on the battery series (S) configuration under a constant power demand (W).
"""
# Nominal voltage for LiPo batteries (3.7V per cell base)
systems = {
'4S (Legacy Small)': 14.8,
'6S (Modern FPV)': 22.2,
'8S (Cinelifter)': 29.6,
'12S (Industrial)': 44.4,
'14S (Next-Gen Solid-State)': 51.8
}
results = []
# Initial calculation to set the 4S system's heat loss as the baseline (100%)
baseline_current = target_power_w / systems['4S (Legacy Small)']
baseline_heat_loss = baseline_current ** 2
for name, voltage in systems.items():
# I = P / V (Calculate required current)
current = target_power_w / voltage
# Heat loss is proportional to the square of the current (Assuming resistance R is constant)
heat_loss_factor = current ** 2
# Calculate relative heat loss percentage compared to the 4S baseline (%)
heat_loss_percent = (heat_loss_factor / baseline_heat_loss) * 100
results.append({
'System': name,
'Voltage (V)': voltage,
'Current (A)': round(current, 2),
'Heat Loss (%)': round(heat_loss_percent, 2)
})
return pd.DataFrame(results)
# --- Run Simulation ---
target_watts = 2000 # Assume a hovering power demand of 2000W for a medium-to-large drone
df = simulate_hv_efficiency(target_watts)
print(f"=== System Load Comparison by Drone Battery Voltage at {target_watts}W Output ===")
print(df.to_string(index=False))
print("-" * 60)
# --- Data Visualization (Graph showing current and heat reduction) ---
fig, ax1 = plt.subplots(figsize=(11, 6))
# X-axis: System types
x = np.arange(len(df['System']))
width = 0.35
# Bar chart 1: Required Current (A)
bars1 = ax1.bar(x - width/2, df['Current (A)'], width, label='Required Current (A)', color='#1f77b4')
ax1.set_ylabel('Required Current (A)', fontsize=12, color='#1f77b4')
ax1.tick_params(axis='y', labelcolor='#1f77b4')
ax1.set_xticks(x)
ax1.set_xticklabels(df['System'], rotation=15, ha='right', fontsize=10)
# Create secondary Y-axis
ax2 = ax1.twinx()
# Bar chart 2: Relative Heat Loss (%)
bars2 = ax2.bar(x + width/2, df['Heat Loss (%)'], width, label='Heat Loss vs 4S (%)', color='#ff7f0e')
ax2.set_ylabel('Heat Loss Ratio (%)', fontsize=12, color='#ff7f0e')
ax2.tick_params(axis='y', labelcolor='#ff7f0e')
ax2.set_ylim(0, 110)
# Add data labels to bars
for bar in bars1:
yval = bar.get_height()
ax1.text(bar.get_x() + bar.get_width()/2, yval + 1, f'{yval}A', ha='center', va='bottom', fontsize=10)
for bar in bars2:
yval = bar.get_height()
ax2.text(bar.get_x() + bar.get_width()/2, yval + 1, f'{yval}%', ha='center', va='bottom', fontsize=10)
plt.title(f'Current Reduction and Heat Control Effects by Drone Voltage System ({target_watts}W Load)', fontsize=15, fontweight='bold')
fig.tight_layout()
plt.show()
When you execute this Python script in your development environment, the numbers and graphs will clearly demonstrate the physics: To produce 2,000W of power, a 4S system demands a brutal 135A, threatening to melt your wiring. However, the 12S system requires only 45A, successfully suppressing heat generation (thermal loss) to a mere 11.1% compared to the 4S system (an ~89% reduction in heat). You can even use this script to factor in the dramatic efficiency of the 14S (51.8V) systems currently being researched for next-generation platforms.
Conclusion
For drone developers, migrating to a High-Voltage (HV) system is no longer just an option; it is an absolute survival strategy in modern engineering. The ultimate goal is not just to “increase power by increasing voltage,” but rather to “lower the system’s current load to control thermal output, reduce the weight of internal wiring, and elevate the performance ceiling of your flight controllers and ESCs.” This is the true essence of 6S, 8S, and 12S architectural design.
If you are an engineer designing an aircraft from scratch, we highly recommend using this Python simulation methodology—factoring in your target payload and endurance—to lock in your optimal “system voltage” and motor KV ratings before touching anything else.
In [Part 4], we will examine the engineering technologies required to protect these incredibly powerful, high-capacity, high-voltage batteries from fire and thermal runaway. We will take a deep technical dive into “Extreme Battery Thermal Management Systems (BTMS), Liquid Cooling, and Phase Change Material (PCM) Technology.” Please look forward to the next installment!
YouTube

Author: maponarooo, CEO of QUAD Drone Lab
Date: May 5, 2026
![ROS2 Mastery [Part 1] Complete Guide to ROS2 Jazzy Development Environment and Workspace](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0330_인포그래픽-1-768x429.png)
