

NVIDIA Isaac ROS: 자율 주행의 한계를 넘는 시각적 인식 기술의 정수
1. 서론: 비정형 환경에서의 결정론적 상태 추정(Deterministic State Estimation)
로보틱스 연구에 있어 자율 주행의 성패는 비이상적이고 동적인 매니폴드(Non-idealized, non-static manifolds) 상에서 로봇이 자신의 상태를 얼마나 정교하게 추정하느냐에 달려 있습니다. 하지만 실제 현장은 실험실과 다릅니다. 센서의 스토캐스틱 노이즈(Stochastic noise), 누적되는 드리프트(Drift), 그리고 실시간 제어 루프의 결정성을 해치는 연산 지연(Computational latency)은 전통적인 기하학적 SLAM이 직면한 거대한 장벽입니다.

NVIDIA Isaac ROS는 이러한 물리적 한계를 소프트웨어 알고리즘과 하드웨어 가속의 긴밀한 결합으로 돌파합니다. 본고에서는 Isaac ROS 3.2 릴리즈를 중심으로, 가속 컴퓨팅 아키텍처가 어떻게 현대 로보틱스의 인식 기술을 재정의하고 있는지 핵심 인사이트를 분석합니다.
——————————————————————————–
2. [Takeaway 1] 250 FPS의 혁신: cuVSLAM이 구현한 제어 루프의 안정성
고속 이동 로봇이나 드론에게 있어 위치 추정의 빈도는 단순한 수치가 아닌 제어 루프의 ‘타이트함(Tightness)’을 결정하는 척도입니다. Isaac ROS의 cuVSLAM은 Jetson AGX Xavier 플랫폼에서 압도적인 실시간성을 증명합니다.
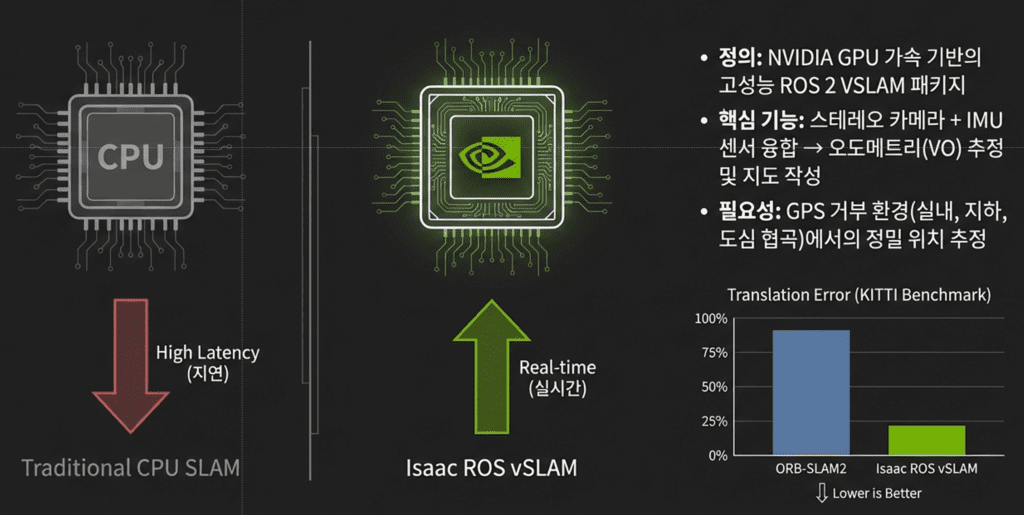
성능 지표 분석 (KITTI Visual Odometry 2012 Benchmark)
- Runtime: 0.007s (특정 설정에서 최대 250 FPS 달성)
- Translation Error: 0.94%
- Rotation Error: 0.0019 deg/m
- Comparison (ORB-SLAM2): Runtime 0.06s / Translation Error 1.15% / Rotation Error 0.0027 deg/m (x86_64 2 cores @ >3.5GHz 기준)
여기서 주목해야 할 전문가적 관점은 단순히 GPU가 빨라서 성능이 좋은 것이 아니라는 점입니다. 가속 컴퓨팅은 실시간으로 더 많은 키포인트를 매칭할 수 있게 하며, 이를 통해 전체적인 재투영 오차(Reprojection Error)를 최소화합니다. 또한, NITROS(NVIDIA Isaac Transport for ROS) 아키텍처를 통한 제로 카피(Zero-copy) 데이터 전달은 지연 시간을 극단적으로 낮추어, 센서 데이터가 제어 명령으로 이어지는 경로를 최적화합니다.
——————————————————————————–
3. [Takeaway 2] RealSense의 역설: 60Hz 인터리빙을 통한 센서 간섭 해결
Intel RealSense D400 시리즈는 고품질의 깊이 정보를 생성하기 위해 액티브 스테레오 프로젝터를 활용합니다. 하지만 이 투사 패턴은 역설적으로 VSLAM의 특징점 추출을 방해하는 노이즈가 됩니다.
“The RealSense D400 series uses an inbuilt optical projector to achieve active stereo vision for improved depth quality. However, the emitted pattern visible on the stereo IR images disrupts VSLAM performance.”
Isaac ROS는 이를 ‘RealSense Splitter’ 노드로 영리하게 해결했습니다. 핵심은 60Hz 주기로 이미터(Emitter) 상태를 껐다 켜는 인터리빙(Interleaving) 방식에 있습니다. Splitter 노드는 메타데이터를 감지하여 이미터가 꺼진 프레임은 VSLAM으로, 이미터가 켜진 고품질 깊이 프레임은 nvblox 매핑용으로 분리하여 전달합니다. 이를 통해 위치 추정의 정밀도와 매핑의 정확도라는 상충하는 목표를 동시에 달성합니다.

——————————————————————————–
4. [Takeaway 3] cuVGL: ‘Kidnapped Robot Problem’을 해결하는 계층적 인덱싱
로봇이 작동 중 위치를 완전히 소실하거나(Kidnapped Robot Problem), 이전에 방문한 대규모 환경에 재진입했을 때 자신의 위치를 찾는 Global Localization은 매우 난해한 과제입니다. Isaac Mapping 패키지의 **cuVGL(CUDA-accelerated Visual Global Localization)**은 SIFT 피처 추출과 BoW(Bag of Words) 메커니즘을 통해 이를 해결합니다.
학술적 관점에서 주목할 점은 어휘집(Vocabulary) 생성 방식의 이원화입니다.
- KMeans: 완전히 새로운 시각적 어휘집을 처음부터 구축할 때 사용됩니다.
- BIRCH (Balanced Iterative Reducing and Clustering using Hierarchies): 대규모 환경에서 기존 어휘집을 **점진적으로 확장(Incremental build)**하거나 정교화하는 데 효율적입니다.
또한, VisualGlobalLocalizationNode는 vmap(map_frame)과 base_link(base_frame) 사이의 좌표 변환을 관리하며, 사용자는 vgl_localization_precision_level 파라미터(0~2)를 통해 정밀도(Precision)와 재현율(Recall) 사이의 트레이드오프를 연구 목적에 맞게 조정할 수 있습니다.
——————————————————————————–
5. [Takeaway 4] 다중 센서 융합의 철학: 물리적 결함에 대응하는 ‘다양성’
단일 센서 시스템은 반드시 물리적 한계에 부딪힙니다. NVIDIA의 설계 철학은 서로 다른 물리적 원리를 가진 센서를 결합하는 **’다양성(Diversity)’**에 기반합니다.
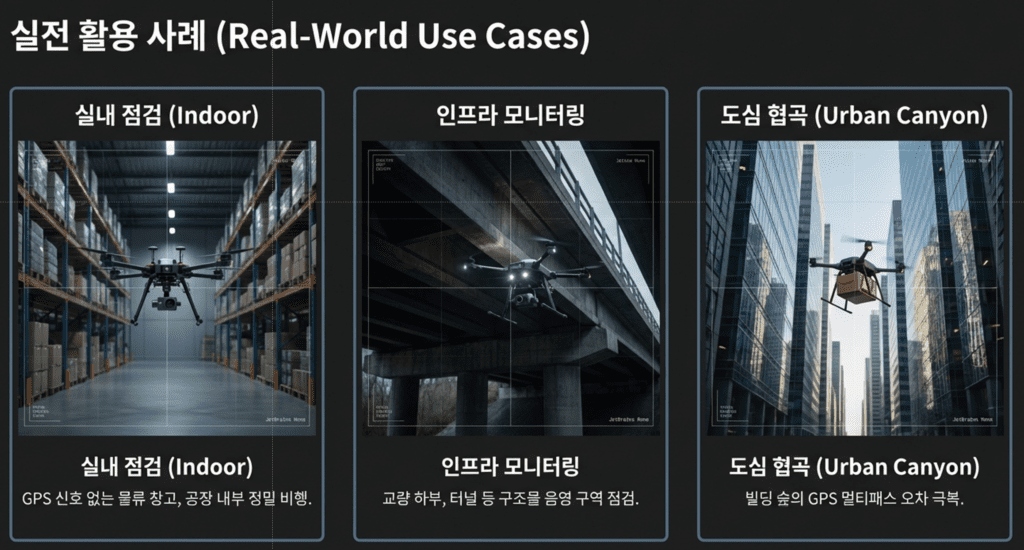
- 물리적 실패 모드 대응: 검은 표면이 LiDAR 광원을 흡수하거나, 낮은 마찰력의 지면에서 바퀴가 미끄러지는(Wheel slip) 등의 상황에서 단일 오도메트리는 붕괴됩니다.
- VIO (Visual-Inertial Odometry): 시각적 특징점이 부족한 무채색 벽면 환경에서 IMU 데이터를 결합하여 위치 추정의 단절을 방지합니다.
- 결함 감지 아키텍처: VSLAM, LiDAR, 바퀴 오도메트리 등 3개 이상의 독립적인 추정치를 동시에 운용함으로써, 시스템은 통계적으로 특정 센서의 오류를 감지하고 격리할 수 있는 견고함을 갖추게 됩니다.
——————————————————————————–
6. [Takeaway 5] 자율 비행과 모바일 플랫폼을 위한 통합 아키텍처
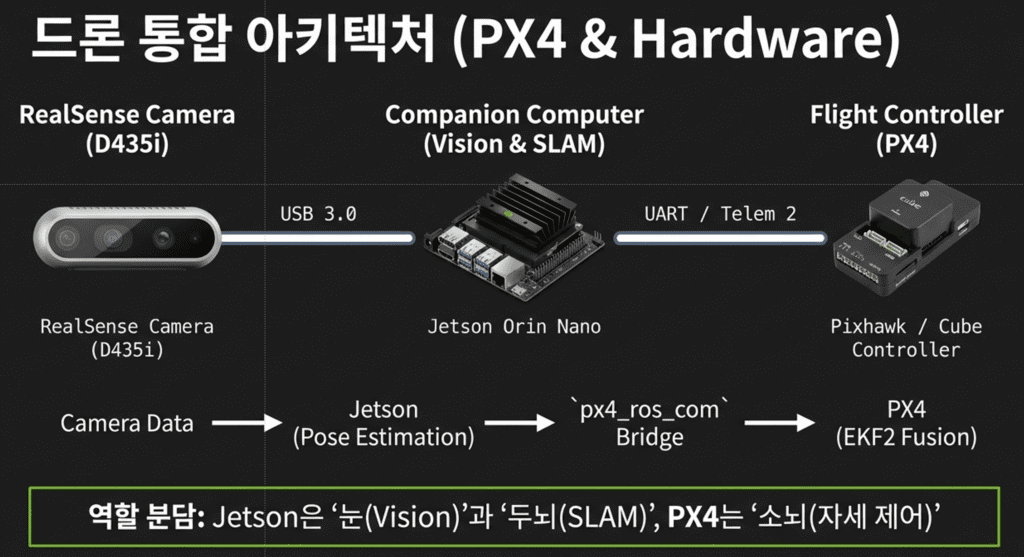
Isaac ROS의 기술적 정수는 Nova Carter와 같은 지상 로봇을 넘어 드론 연구소(QUAD)의 자율 비행 아키텍처로 확장됩니다.
최근 2024년 말(3.2 release) 업데이트를 통해 다중 카메라 구성(Multi-camera setup)의 확장성이 비약적으로 향상되었습니다. 이는 로봇 주변의 전방위 시야를 통합된 좌표계로 가속 처리할 수 있음을 의미합니다. 특히 드론 플랫폼에서는 MicroXRCEDDSAgent를 통해 ROS 2와 PX4 통신 레이어를 결합, 고속 이동 중에도 GPU 가속 VSLAM 데이터를 비행 제어기(FC)에 실시간으로 공급함으로써 더욱 정밀한 자율 비행을 가능케 합니다.
——————————————————————————–
7. 결론: 센서 데이터의 물리적 한계를 넘어서
NVIDIA Isaac ROS는 로봇의 ‘눈’을 진화시키는 방식이 단순히 더 좋은 센서를 쓰는 것에 있지 않음을 보여줍니다. RealSense의 패턴 간섭을 60Hz 인터리빙으로 극복하고, 방대한 BoW 인덱싱을 GPU로 가속하며, 센서 간의 물리적 결함을 통계적 융합으로 보완하는 아키텍처야말로 로보틱스 엔지니어링의 정수입니다.
우리는 이제 질문을 던져야 합니다. 센서 데이터의 물리적 한계와 연산 자원의 제약을 하드웨어 가속 알고리즘으로 어디까지 극복할 수 있을까요? Isaac ROS는 이미 실시간 결정론적 상태 추정이라는 자율 주행의 가장 어려운 숙제에 대해 강력한 해답을 제시하고 있습니다.

Author: maponarooo, CEO of QUAD Drone Lab
Date: February 7, 2026
![[MAVSDK C++ Part 4] Building Your Own App: Project Setup and Drone Connection](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0314_인포그래피-768x512.png)
![PX4 MAVSDK – C++ Programming 제 [2편] MAVSDK 활용을 위한 C++ 핵심 문법](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0312_인포그래픽-768x768.jpg)
![PX4 MAVSDK – C++ Programming [10편] 사용자 정의 로깅 및 통합 테스트(gtest)](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0320_인포그래피-768x419.jpg)
![PX4 MAVSDK – C++ Programming [Part 9] Precision Drone Control: Offboard Mode](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0319_인포그래픽-768x429.jpg)
![PX4 MAVSDK – C++ Programming [5편] 시스템 정보 쿼리 및 원격 측정(Telemetry) 활용](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0315_인포그래피-768x512.png)
![[PX4 튜닝 시리즈 부록] 레이싱 드론 튜닝 가이드 (Racer Setup): 한계를 뛰어넘는 극강의 퍼포먼스](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Racing-Drone-Minimalism-and-Balance-768x429.png)