
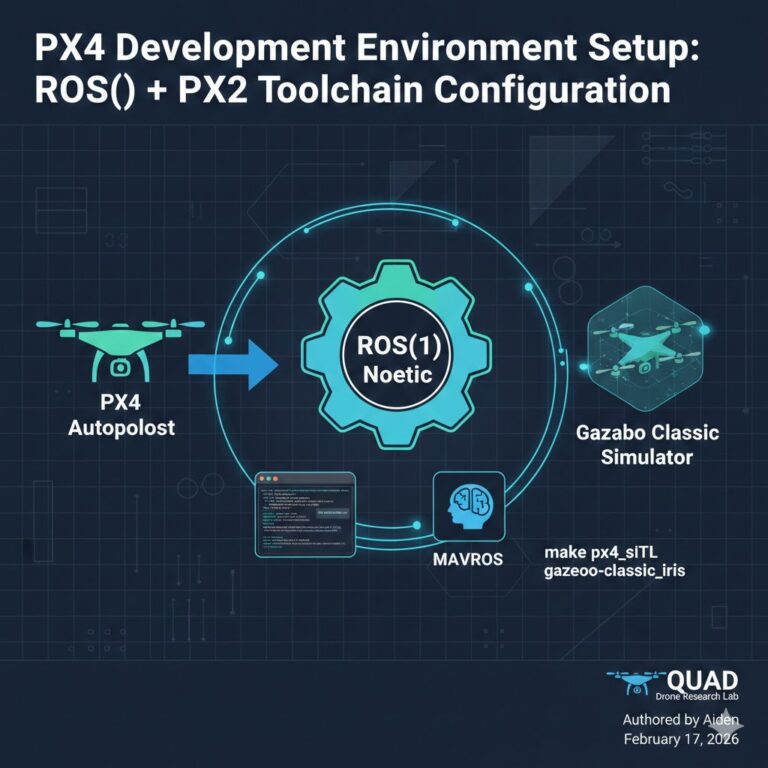
PX4 개발환경 구성 – ROS2 + PX4 Toolchain 구성
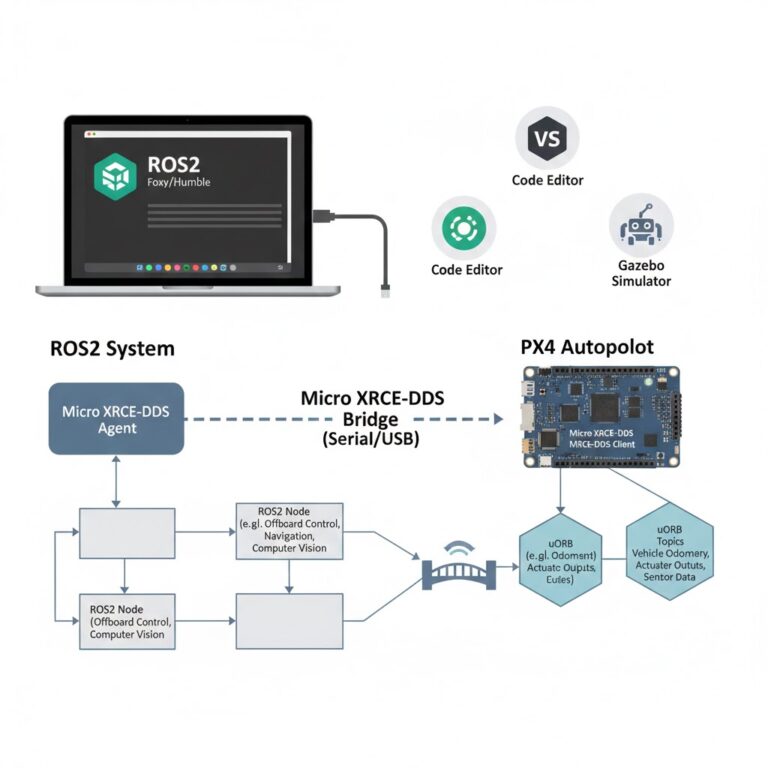
안녕하세요. 마케팅팀 에이든(Aiden)입니다. 오늘은 PX4 개발환경 구성 그 중에서도 ROS2 + PX4 Toolchain 구성에 대해 소개해드리려 합니다. 해당 내용은 저희 QUAD 드론 연구소의 저작권으로 등록되어있는 내용이며 무단 배포는 양해주시길 부탁 드립니다. ROS2 + PX4 Toolchain 구성 하단의 유튜브 영상과 함께 순차적으로 작업해주시길 바랍니다. 1. Ubuntu 22.04 + ROS2 Humble 설치 ROS2 Humble 설치는 링크를 참고 하십시오. 2….



![[Seminar Review] AI-Powered Pixhawk (PX4) Autonomous Flight Training at Goheung Drone Center](https://quad-drone-lab.co.kr/wp-content/uploads/2026/02/Snapshot_4-768x432.png)