
2026년 04월 13일 PX4 주간 개발 동향: CI/CD 혁신, 비행 안정성 및 자율 비행 역량 강화
PX4 주간 통합 브리핑
이번 주 PX4 Autopilot 개발은 시스템의 전반적인 견고성, 안전성, 그리고 개발자 경험 개선에 중점을 둔 다면적인 양상을 보였습니다. 특히, 빌드 및 테스트 자동화 시스템(CI/CD)에 대한 광범위한 리팩토링 및 개선 작업이 두…
PX4 주간 통합 브리핑
이번 주 PX4 Autopilot 개발은 시스템의 전반적인 견고성, 안전성, 그리고 개발자 경험 개선에 중점을 둔 다면적인 양상을 보였습니다. 특히, 빌드 및 테스트 자동화 시스템(CI/CD)에 대한 광범위한 리팩토링 및 개선 작업이 두…
![ROS2 Mastery [Part 1] Complete Guide to ROS2 Jazzy Development Environment and Workspace](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0330_인포그래픽-1-768x429.png)
Hello! I’m Aiden from the Marketing Team. To all the university students and field researchers studying robotics and autonomous driving—welcome to our serial blog based on the QUAD Drone Lab’s “ROS2 Express Master Course.” Before diving into serious robot programming, the most critical foundational step is properly setting up your development environment. If your configuration…
안녕하세요! 마케팅 팀의 에이든(Aiden)입니다. 로봇 공학과 자율주행을 연구하시는 대학생, 그리고 현장의 연구원 여러분. 쿼드(QUAD) 드론연구소의 ‘ROS2 속성 마스터 과정’을 바탕으로 진행되는 연재 블로그에 오신 것을 환영합니다. 본격적인 로봇 프로그래밍에 앞서 가장 중요하고 기초가 되는 단계는 바로 ‘개발 환경을 올바르게 구축하는 것’입니다. 환경 설정이 꼬이면 이후 복잡한 로봇 코드를 작성할 때 원인을 알 수 없는 에러에…
![PX4 MAVSDK – C++ Programming [Episode 11] Complete Comparison of MAVSDK vs MAVROS vs uXRCE-DDS](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0322_인포그래피-768x512.png)
Hello! This is Aiden from the Marketing Team. In our previous episode, we explored how to enhance the reliability of autonomous flight software through custom logging and automated integration testing using gtest. By now, you have built a solid foundation for controlling drones using MAVSDK C++. However, when starting a serious autonomous drone project in…
안녕하세요! 마케팅팀 에이든(Aiden)입니다. 지난 10편에서는 자율 비행 소프트웨어의 신뢰성을 높이기 위한 사용자 정의 로깅과 gtest를 활용한 통합 테스트 자동화 방법에 대해 알아보았습니다. 이제 여러분은 MAVSDK C++를 활용하여 드론을 자유자재로 제어할 수 있는 훌륭한 기반을 갖추었습니다. 하지만 대학원이나 기업 연구소에서 본격적인 자율 주행 드론 프로젝트를 시작하려고 할 때, 시스템 아키텍처 설계 단계에서 반드시 마주치는 가장 큰…
![PX4 MAVSDK – C++ Programming 제 [1편] 라이브러리 개요 및 아키텍처](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0309_인포그래픽-768x419.jpg)
안녕하세요! 마케팅팀 에이든(Aiden)입니다. 오늘은 전 세계적으로 가장 널리 사용되는 오픈 소스 비행 제어 스택인 PX4 Autopilot과, 이를 외부 컴퓨터(Companion Computer)에서 제어하기 위한 핵심 도구인 MAVSDK C++ 라이브러리에 대해 다뤄보려 합니다. 첫 번째 시간인 오늘은 코드를 본격적으로 작성하기 전에 반드시 알아야 할 MAVSDK의 탄생 배경, 통신 프로토콜, 그리고 전반적인 시스템 아키텍처를 설명해 드리겠습니다. MAVSDK의 탄생 배경과…
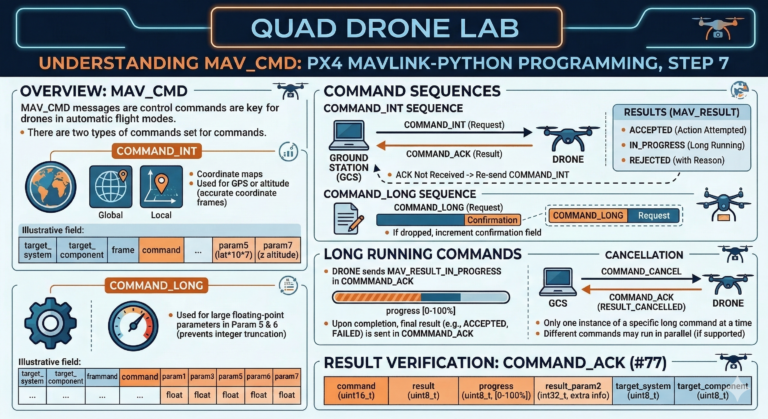
Hello, I’m Aiden from the Marketing Team. Today, I would like to introduce the 7th step of PX4 MAVLINK-PYTHON programming: MAV_CMD. This content is registered as the copyrighted property of our QUAD Drone Lab, so please refrain from unauthorized distribution. MAV_CMD OVERVIEW MAV_CMD Messages is a list of control commands that can be issued to…
안녕하세요. 마케팅팀 에이든(Aiden)입니다. 오늘 소개해드릴 내용은 PX4 MAVLINK-PYTHON 프로그래밍의 7번째 단계인 MAV_CMD입니다. 해당 내용은 저희 QUAD 드론 연구소의 저작권으로 등록되어있는 내용이며 무단 배포는 지양해주시길 부탁드립니다. MAV_CMD 개요 MAV_CMD 메세지는 자동 비행 모드에서 기체에 줄 수 있는 제어명령 목록 입니다. MAV_CMD는 크게 COMMAND_INT 와 COMMAND_LONG 타입이 있으며, 드론에 어떠한 명령을 보낼때 사용합니다. COMMAND_INT 는 GPS 좌표 또는…
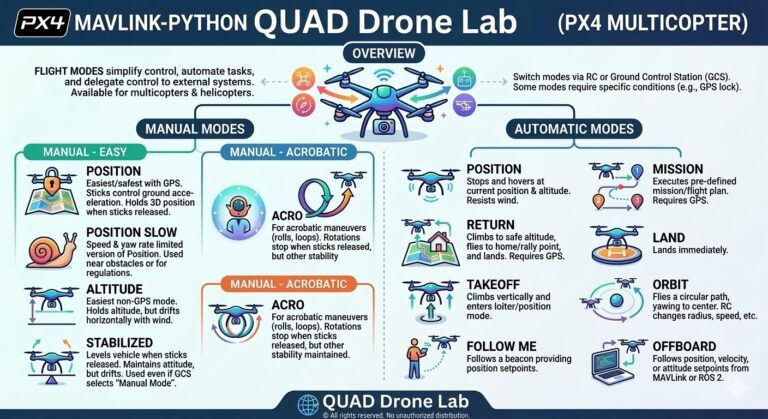
Hello, this is Aiden from the Marketing Team. Today, I would like to introduce PX4 MAVLink-Python Programming – Flight Modes (PX4 Multicopter). Please note that this content is the registered copyright of QUAD Drone Lab, and we kindly ask you to refrain from unauthorized distribution. Flight modes support autopilot features to make it easier to manually control…
안녕하세요. 마케팅팀 에이든(Aiden)입니다. 오늘 소개해드릴 내용은 PX4 MAVLINK-PYTHON 프로그래밍 – 비행모드(PX4 멀티콥터)입니다. 해당 내용은 저희 QUAD 드론 연구소의 저작권으로 등록되어있는 내용이며 무단 배포는 지양해주시길 부탁드립니다. 비행 모드는 자동 조종 기능을 지원하여 차량을 수동으로 조종하고, 이륙 및 착륙과 같은 일반적인 작업을 자동화하고, 자율 임무를 실행하거나 비행 제어를 외부 시스템에 위임하는 작업을 더 쉽게 해줍니다. 이 주제에서는 멀티콥터와…