
![[Hybrid Navigation System: Part 6] [Implementation-Phase 2] Intermediate Correction: OpenCV/YOLO Terrain Matching and Digital Twin Testing](https://quad-drone-lab.co.kr/wp-content/uploads/2026/06/Absolute_Visual_Localization_for_UAVs-768x429.jpg)
[Hybrid Navigation System: Part 6] [Implementation-Phase 2] Intermediate Correction: OpenCV/YOLO Terrain Matching and Digital Twin Testing
Hello! To all the graduate students and researchers burning the midnight oil at the forefront of autonomous unmanned aerial vehicle (UAV) systems—welcome back to the QUAD Drone Lab. In Part 5, we explored PX4’s Dead-Reckoning mode, a critical software safety net that allows a drone to survive and maintain flight in GNSS-Denied environments, such as…
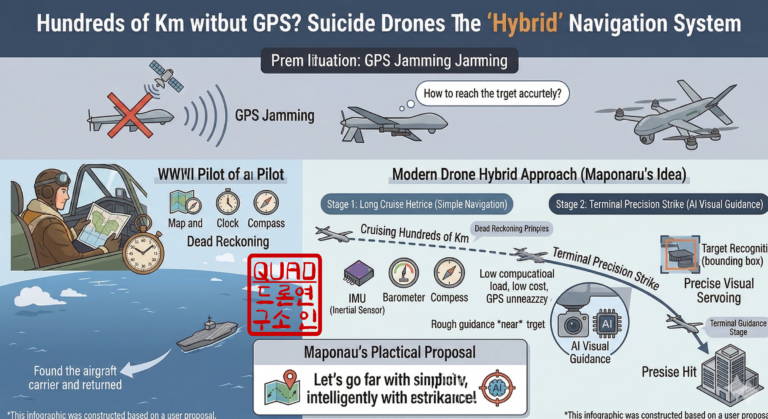
![[Hybrid Navigation System Series Part 1: Overview] Flying Hundreds of Kilometers Without GPS? Learning a Hybrid Navigation System from WWII Pilots](https://quad-drone-lab.co.kr/wp-content/uploads/2026/04/컴패니언-컴퓨터-기반의-AI-지형지물-보정-768x419.jpg)
![PX4 MAVSDK – C++ Programming [Part 12] Advanced Autonomous Flight Research Cases Using MAVSDK C++](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0322_인프그래피2-768x429.jpg)