
Building a ‘non-GPS Hybrid Unmanned Navigation System’ for Suicide Drones: Ready
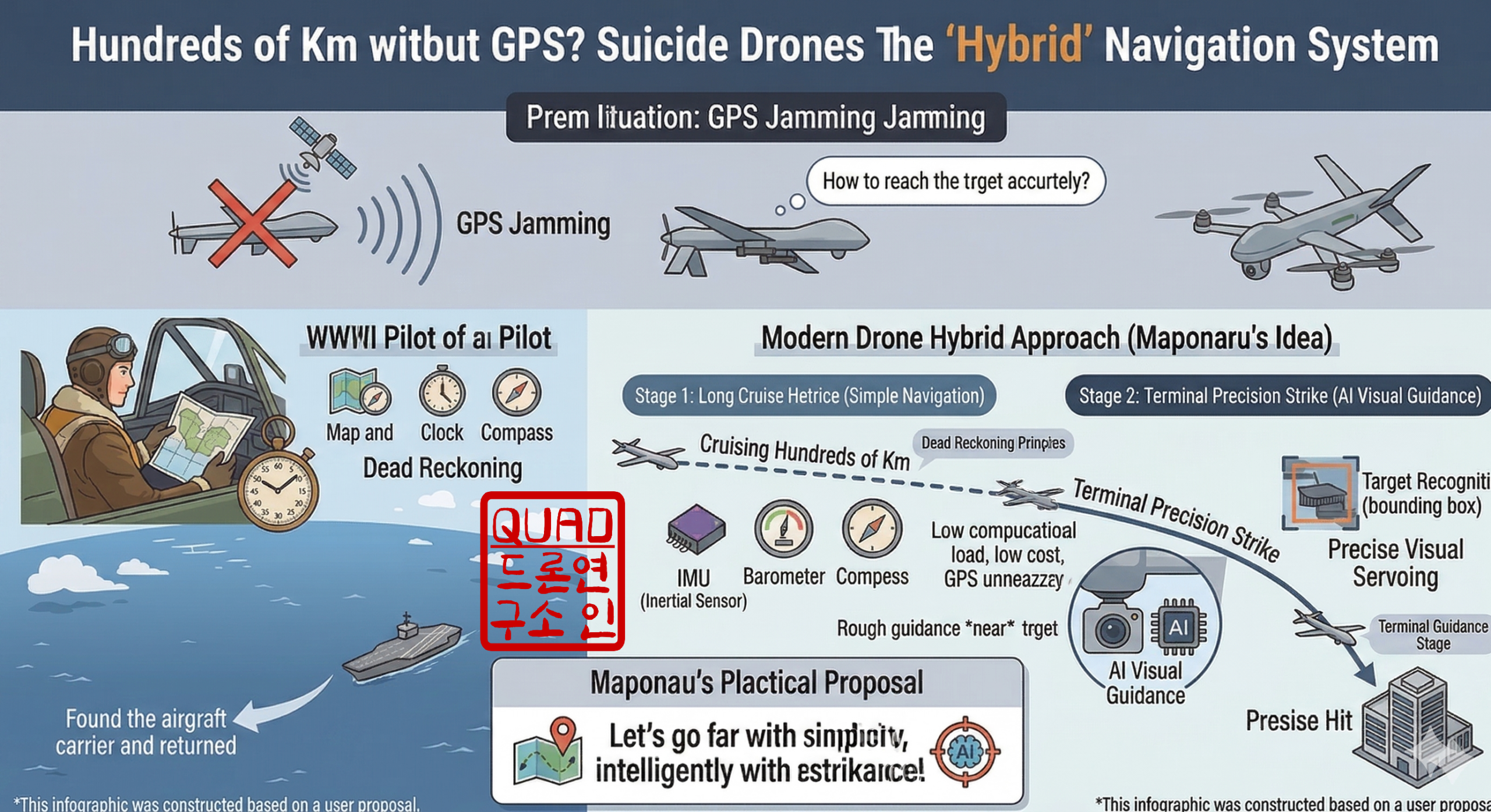
Recently, news about “Iranian suicide drones flying hundreds of kilometers to attack a target” has become an almost daily occurrence. Watching these reports, a thought suddenly crossed my mind: “With recent GPS jamming making it difficult to use GPS for navigation, how did they manage to fly to their targets?” This led to another question: “Is a GPS-based navigation system absolutely necessary?”
Wait, during WWII, fighter pilots navigated the vast Pacific Ocean and successfully found those tiny aircraft carriers using nothing but a map and a compass. Why not just use that method for navigation? Do we really need to apply complex positioning algorithms like SLAM or VINS (Visual Inertial Navigation System)? What if we navigate the way WWII Air Force pilots did, and then use AI for precision visual servoing at the very end?
– Maponarooo’s thought –
non-GPS Hybrid Unmanned Navigation System
This approach accepts the accumulated error that occurs during a flight of hundreds of kilometers, but compensates for it with ‘visual acquisition’ in the final stage.
1. Cruising Phase: Classic Dead Reckoning + Wind Estimation
This algorithmizes the way pilots calculated flight speed, compass direction, and time.
- Algorithm: EKF (Extended Kalman Filter) based velocity/heading integration
- Input Data: IMU (Accelerometer/Gyro), Geomagnetic Sensor (Compass), Airspeed Sensor.
- Core Logic: What WWII pilots feared most was drifting due to the ‘wind’. In drones as well, the difference between airspeed and ground speed must be calculated to estimate ‘wind direction/speed’ in real-time, and this must be continuously corrected in the flight trajectory (Crab Angle calculation).
- Limitation: When flying hundreds of kilometers, this error expands to the scale of several kilometers. (Even during WWII, it was common to miss the carrier and ditch in the ocean). You can measure this limitation more intuitively by building a simulator for it.
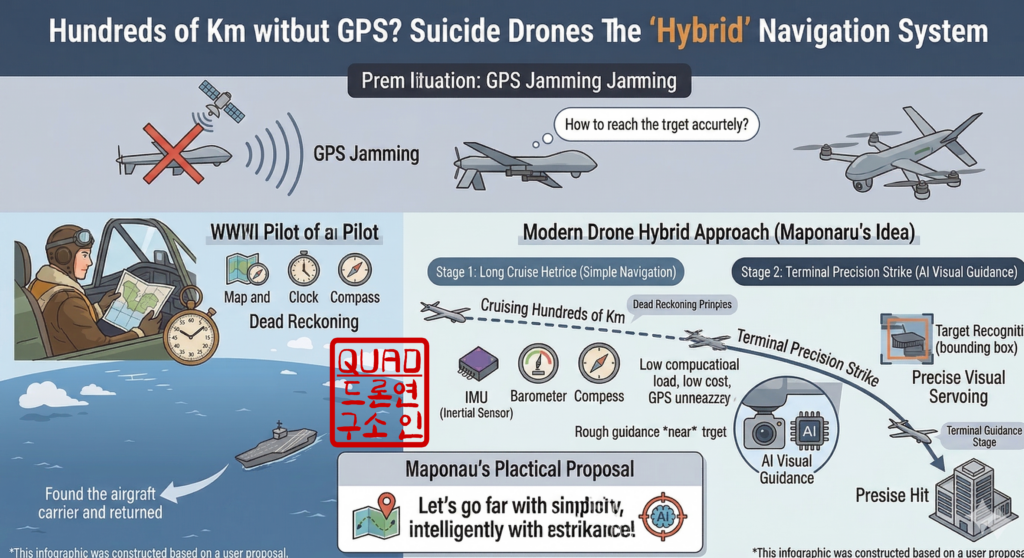
2. Mid-Course Correction Phase: Modern Pseudo-YE-ZB System
Back then, aircraft carriers used a radio transmitter called ‘YE-ZB’ to give pilots their bearing. If GPS is unavailable, this must be replaced by ‘terrain feature-based position correction’.
- Algorithm: Template Matching (Simplified Terrain Comparison)
- Logic: There’s no need to load a map of the entire route. Only image information for prominent ‘checkpoints’ (e.g., a specific island, mountain ridge curves, coastline shapes) along the way is stored. When the drone reaches the vicinity, and the downward-facing camera captures the terrain, the distorted current position coordinates are forcibly initialized (Reset) to ‘0’. This is identical to the process of a pilot seeing an island and confirming, “Ah, I know where I am now.”
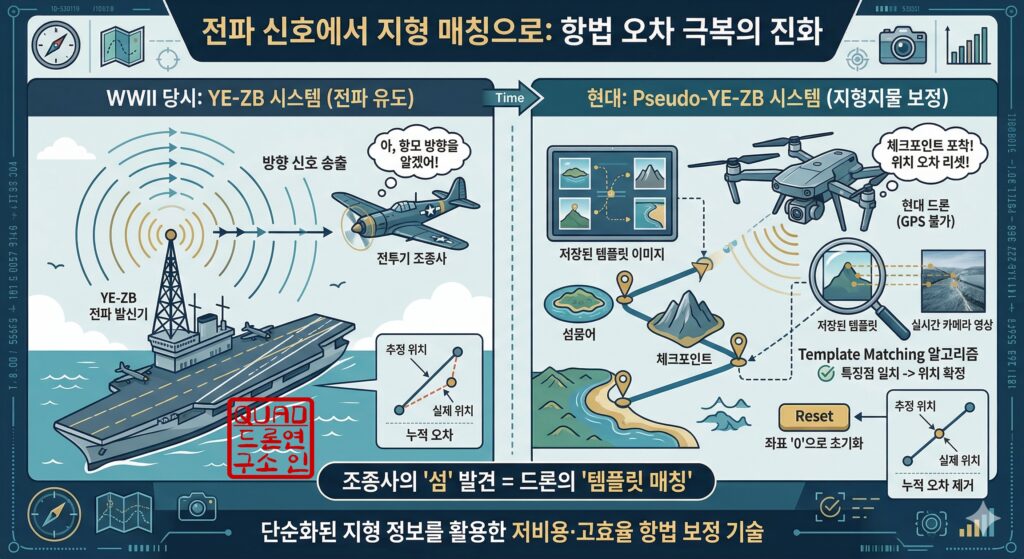
3. Terminal Phase: Precision Visual Servoing
This is executed when reaching the vicinity of the target (within the margin of error). It’s the stage where the pilot spots the silhouette of the carrier from afar and dives in.
- Algorithm: IBVS (Image-Based Visual Servoing)
- Logic: After identifying the target using a lightweight object detection model like YOLO, it generates a control input to make the error between the target’s center on the image ($u, v$) and the camera screen’s center ($u_c, v_c$) ‘0’. At this time, direct speed/attitude commands are given via PX4’s Offboard mode.
So, we have outlined the overall algorithm for the non-GPS Hybrid Unmanned Navigation System. Moving forward, we will proceed with detailed system design for each phase.
This lecture series will be available as video lectures if you sign up for membership on our QUAD Drone Lab YouTube channel. We ask for your interest and viewership.
Thank you.
YouTube Tutorial

Author: maponarooo, CEO of QUAD Drone Lab
Date: April 10, 2026
![PX4 MAVSDK – C++ Programming [Episode 5] Querying System Information and Using Telemetry](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0315_인포그래피-768x512.png)
![[연재 안내] ROS2 Mastery: 대학생 & 연구원을 위한 ROS2 가이드](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/image-11-768x429.png)
![PX4 MAVSDK – C++ Programming [Episode 10] Custom Logging and Integration Testing (gtest)](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0320_인포그래피-768x419.jpg)
![[ROS2 Mastery 9편] 싱글 프레임 및 움직이는 로봇 TF2 브로드캐스팅 실습 가이드](https://quad-drone-lab.co.kr/wp-content/uploads/2026/06/0605_인포그래픽-768x429.jpg)
![[PX4 튜닝 시리즈 부록] 레이싱 드론 튜닝 가이드 (Racer Setup): 한계를 뛰어넘는 극강의 퍼포먼스](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Racing-Drone-Minimalism-and-Balance-768x429.png)
![PX4 MAVSDK – C++ Programming [Episode 6] Basic Flight Control using Action API](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0316_인포그래피-768x512.png)