
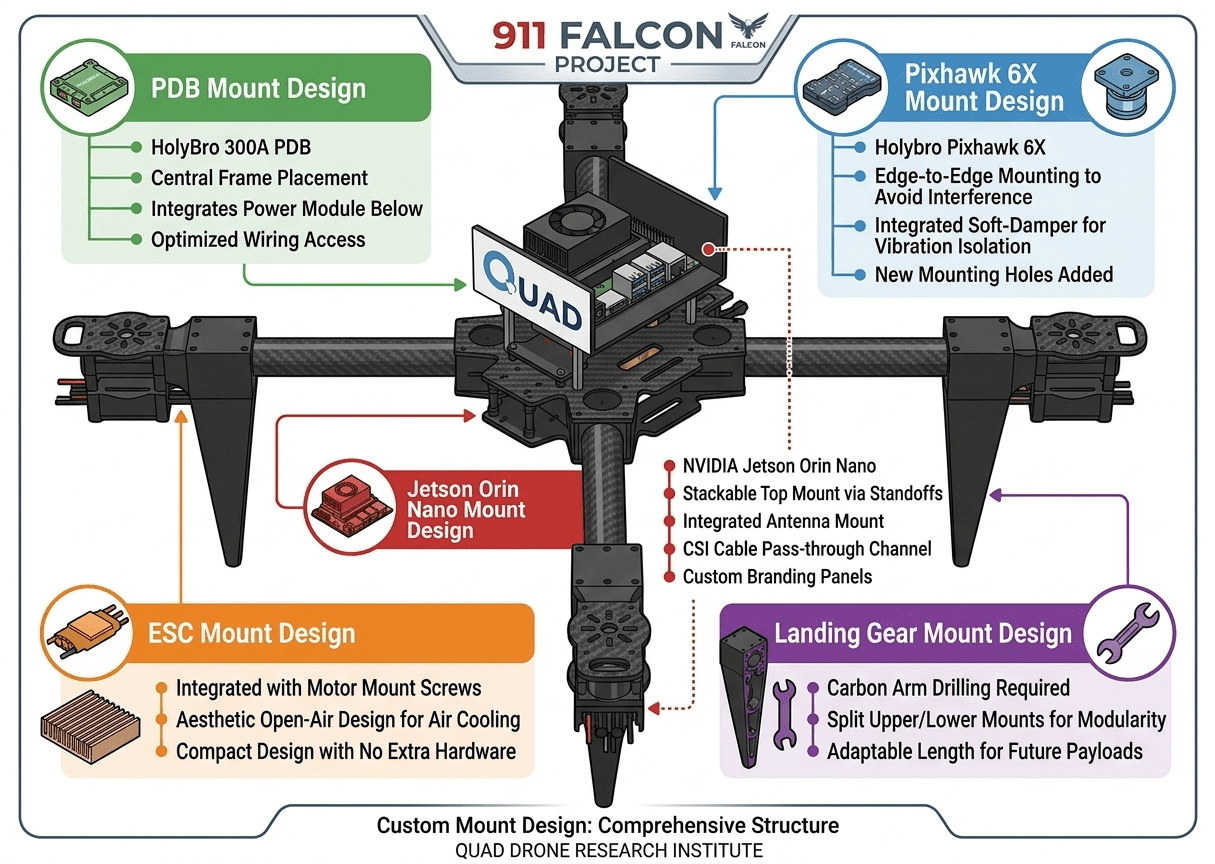
주요장치 마운트 설계 : 911 FALCON 프로젝트
안녕하세요, 쿼드(QUAD) 드론연구소의 이근찬 선임연구원입니다.
지난 편에서는 911 FALCON 드론의 기체 프레임 형상을 정리하고, 주요 부품의 배치 방향을 검토해 보았습니다. 데이터시트와 실측을 바탕으로 HTX415 프레임을 역설계했으며, 이를 기준으로 Power Module, PDB, Pixhawk 6X, NVIDIA Jetson Orin Nano, 배터리, ESC를 각 부품의 역할과 요구사항에 맞는 위치에 배치했습니다.
다만 배치 검토 결과, 일부 부품은 프레임에 직접 장착하기에 적절한 체결 구조가 마련되어 있지 않았습니다. 특히 PDB, Pixhawk 6X, NVIDIA Jetson Orin Nano, ESC, 그리고 랜딩기어는 기존 프레임 구조만으로는 장착이 어려웠기 때문에, 별도의 전용 마운트 설계가 필요했습니다.
이번 글에서는 이러한 부품들을 실제 기체에 결합하기 위해 어떤 기준으로 전용 마운트를 설계했는지, 그리고 설계 과정에서 어떤 간섭과 구조적 문제를 고려했는지를 중심으로 정리해 보겠습니다.
1. 마운트 설계
1-1) PDB 마운트 설계
제품 :
HolyBro 300A Power Distribution Module

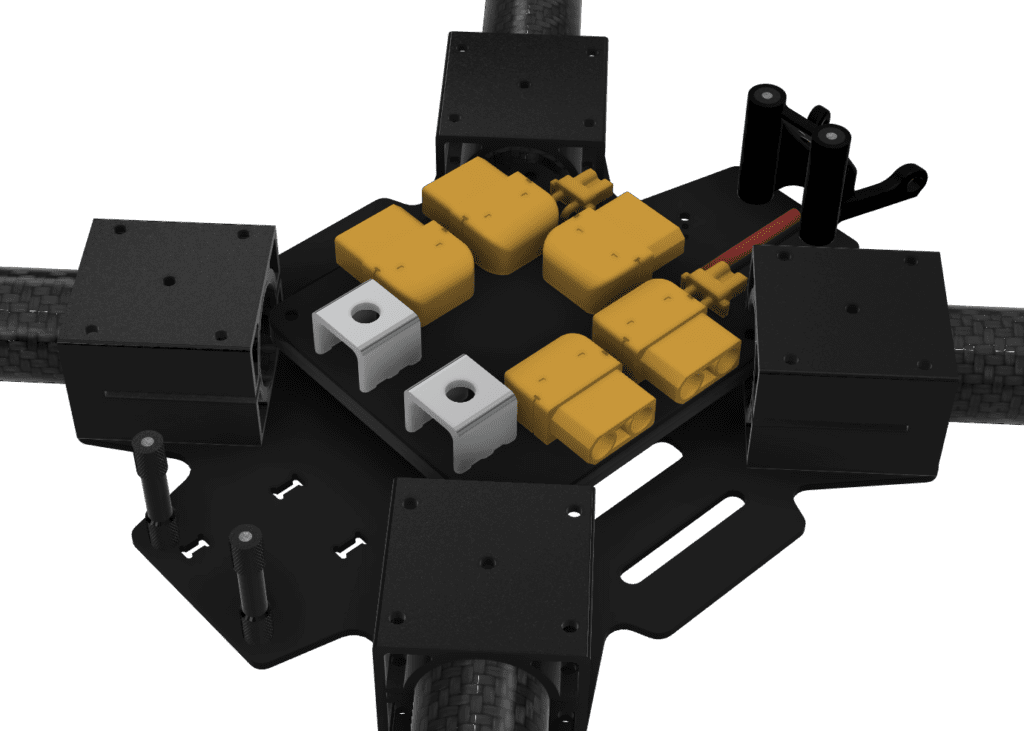
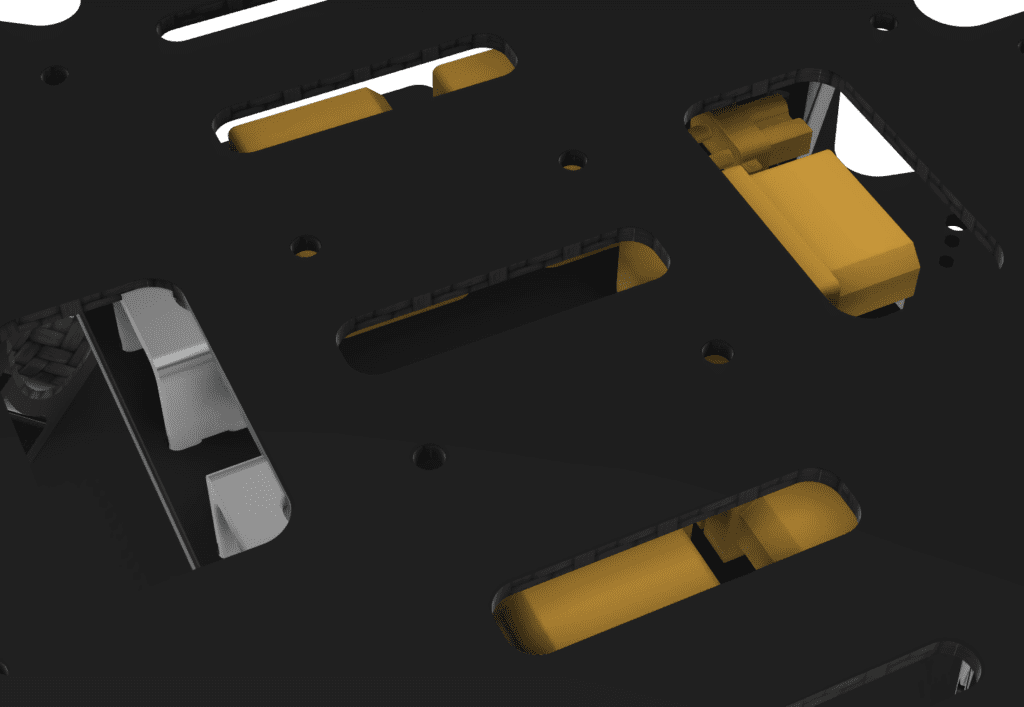
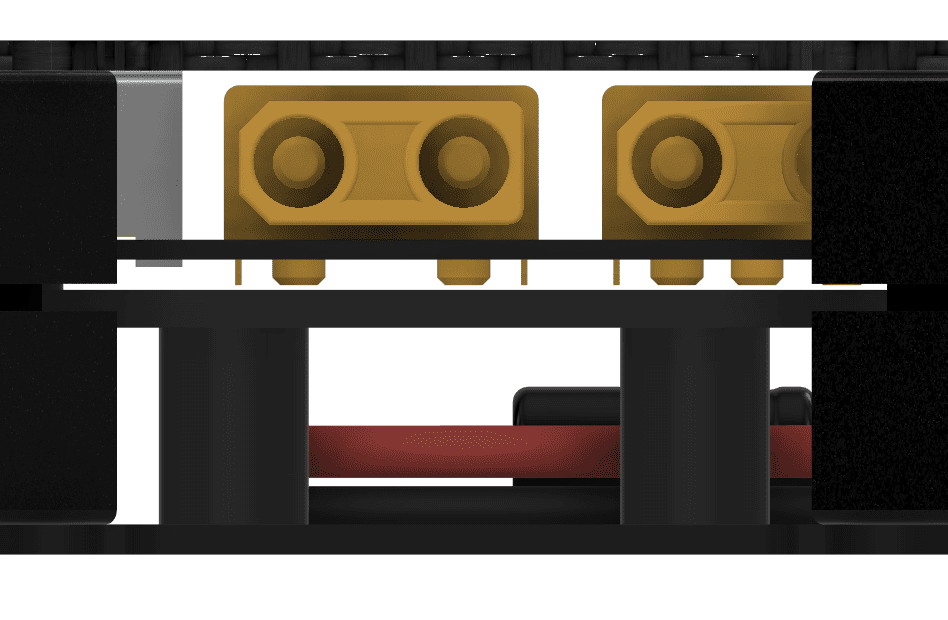
PDB 전용 마운트를 설계할 때 가장 먼저 고려했던 점은, PDB가 프레임 상판과 하판 사이 중앙부에 배치되어야 한다는 점과 함께, 그 하부에 Power Module이 함께 배치되어야 한다는 점이었습니다. 따라서 단순히 PDB만 고정할 수 있는 구조가 아니라, 중앙 적층 공간 안에서 두 부품이 함께 들어갈 수 있어야 했고, 각 모터의 메인 전원선이 연결되는 구조까지 고려했을 때 전원 흐름과 배선 접근성도 함께 반영할 필요가 있었습니다.

하지만 실제 프레임 내부 공간은 여유가 크지 않았고, 특히 중앙부 사방에는 암대를 체결하는 알루미늄 인서트가 위치하고 있어 마운트 형상이 쉽게 제한되었습니다. 즉, PDB는 프레임 중앙에 들어가야 했지만 단순한 평판 구조로는 인서트와 간섭이 발생할 수 있었고, 여기에 더해 PDB 하부에 배치될 Power Module을 위한 높이까지 확보해야 했기 때문에, 내부 공간 제약이 동시에 발생하는 구조였습니다.
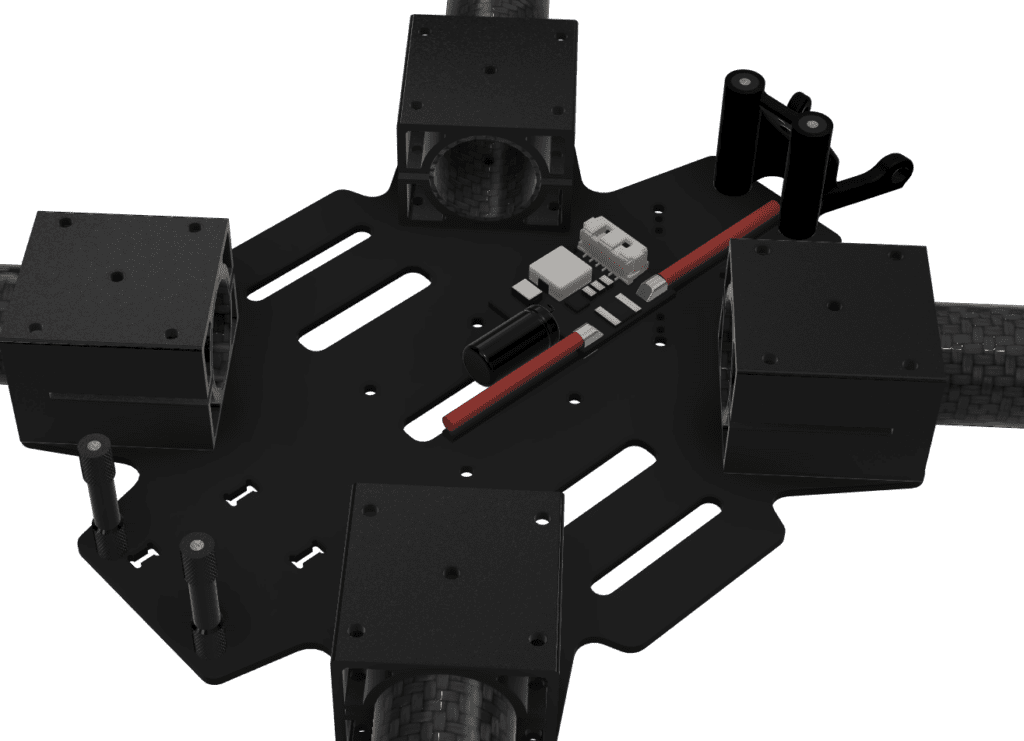
따라서 PDB 전용 마운트는 먼저 알루미늄 인서트와 간섭이 발생하지 않도록 외곽 형상을 조정하고, 동시에 상판과 하판 사이 공간 안에 수용될 수 있는 높이와 폭으로 설계했습니다. 또한 PDB 하부에 Power Module이 함께 들어갈 수 있도록 하부 공간을 확보하는 방향으로 마운트 높이를 설정했습니다. 결과적으로 이번 PDB 마운트는 단순히 보드를 고정하는 부품이 아니라, 제한된 중앙 적층 공간 안에서 PDB와 Power Module을 함께 수용하기 위한 구조 부품으로 설계했습니다.
1-2) Pixhawk 6X 마운트 설계
제품 :
Holybro Pixhawk 6X

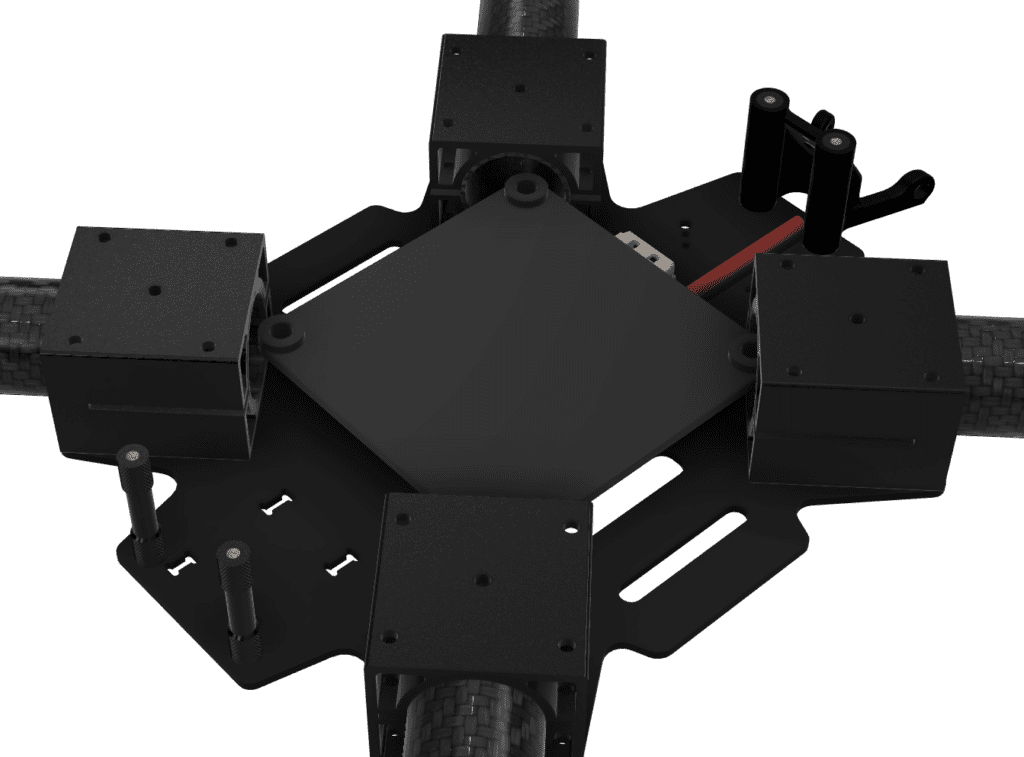
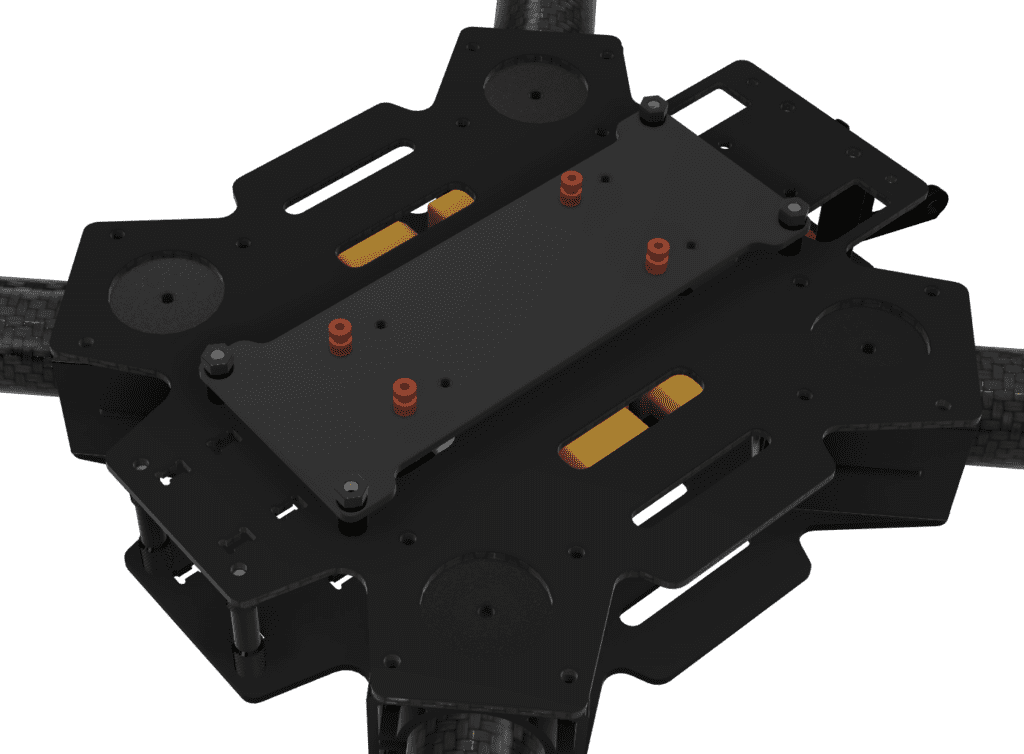
Pixhawk 6X 전용 마운트를 설계할 때 가장 먼저 고려했던 점은, 비행제어기가 드론 상판 중앙에 배치되어야 한다는 점과 함께, 장착 과정에서 진동이 직접 전달되지 않도록 해야 한다는 점이었습니다. 또한 Pixhawk 6X는 기체의 자세 추정과 비행 안정화에 직접적으로 관여하는 부품이기 때문에, 단순한 고정보다는 안정적인 체결 구조와 진동 저감 구조를 함께 반영할 필요가 있었습니다.
하지만 초기에는 상판 중앙에 이미 있는 홀을 활용하여 마운트하는 방식을 검토했으나, 이후 PDB 마운트가 하부 Power Module 공간 확보를 위해 높아지면서, PDB 마운트와 FC 마운트를 고정하는 볼트 머리 사이에 간섭이 발생했습니다. 따라서 기존의 중앙 홀만을 이용한 체결 방식으로는 충분한 공간 확보가 어렵고, 하부 구조와의 간섭도 해소하기 어려운 문제가 있었습니다.
따라서 Pixhawk 6X 마운트는 기존 중앙 홀 대신 상판 가장자리 홀을 활용하는 방향으로 수정했습니다. 다만 상부에는 활용 가능한 홀이 있었지만 하부에는 대응되는 홀이 없었기 때문에, 적절한 위치에 직접 타공하여 추가 체결 홀을 마련했습니다. 또한 각 체결 볼트 위치에는 소프트 댐퍼를 삽입하여 기체 진동이 FC에 직접 전달되지 않도록 했습니다. 결과적으로 이번 Pixhawk 6X 마운트는 하부 구조와의 간섭을 피하면서도, 진동 저감 구조를 함께 반영한 전용 마운트로 설계했습니다.

1-3) NVIDIA Jetson Orin Nano 마운트 설계
제품 :
NVIDIA Jetson Orin Nano

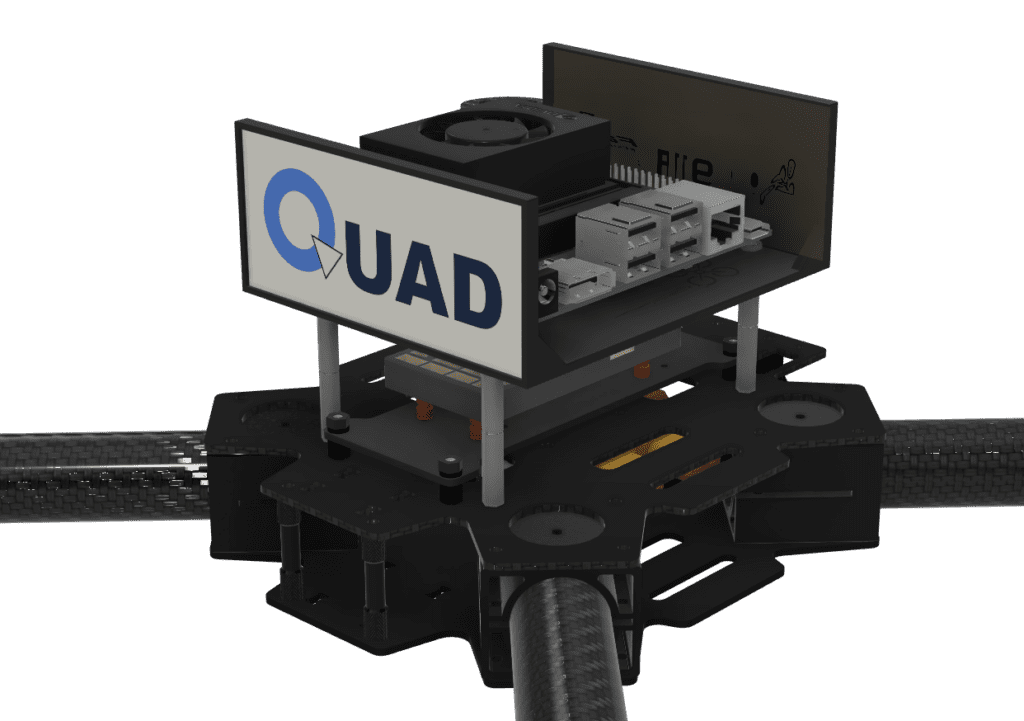
NVIDIA Jetson Orin Nano 전용 마운트를 설계할 때 가장 먼저 고려했던 점은, Jetson Orin Nano에 연결되는 Wi-Fi 안테나를 함께 고정할 수 있어야 한다는 점과, 카메라 연결을 위해 CSI 케이블이 지나갈 수 있는 구조가 필요하다는 점이었습니다. 따라서 단순히 보드만 장착하는 구조가 아니라, 안테나 고정 구조와 케이블 통로까지 함께 반영할 수 있는 마운트 형상이 필요했습니다.
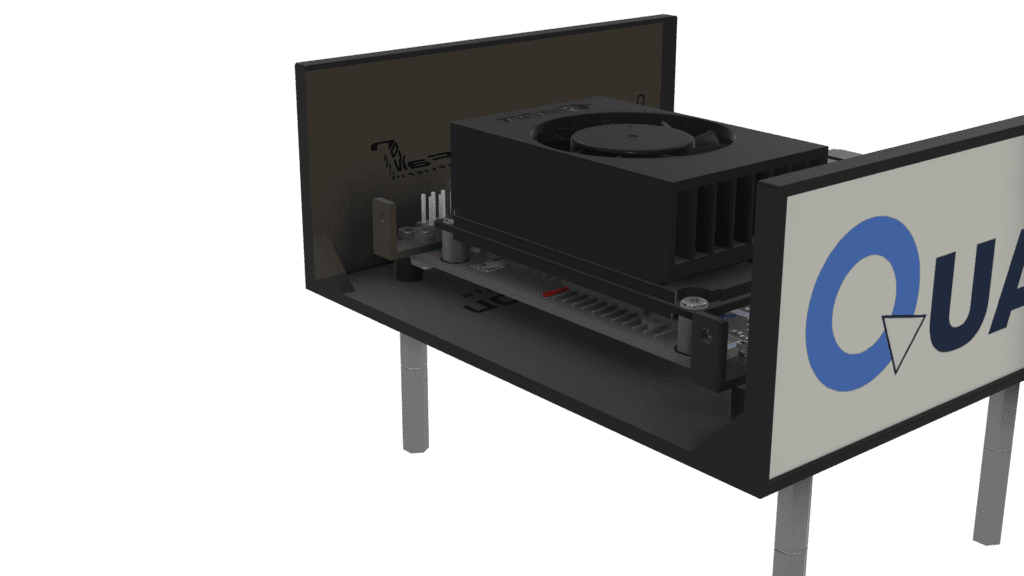
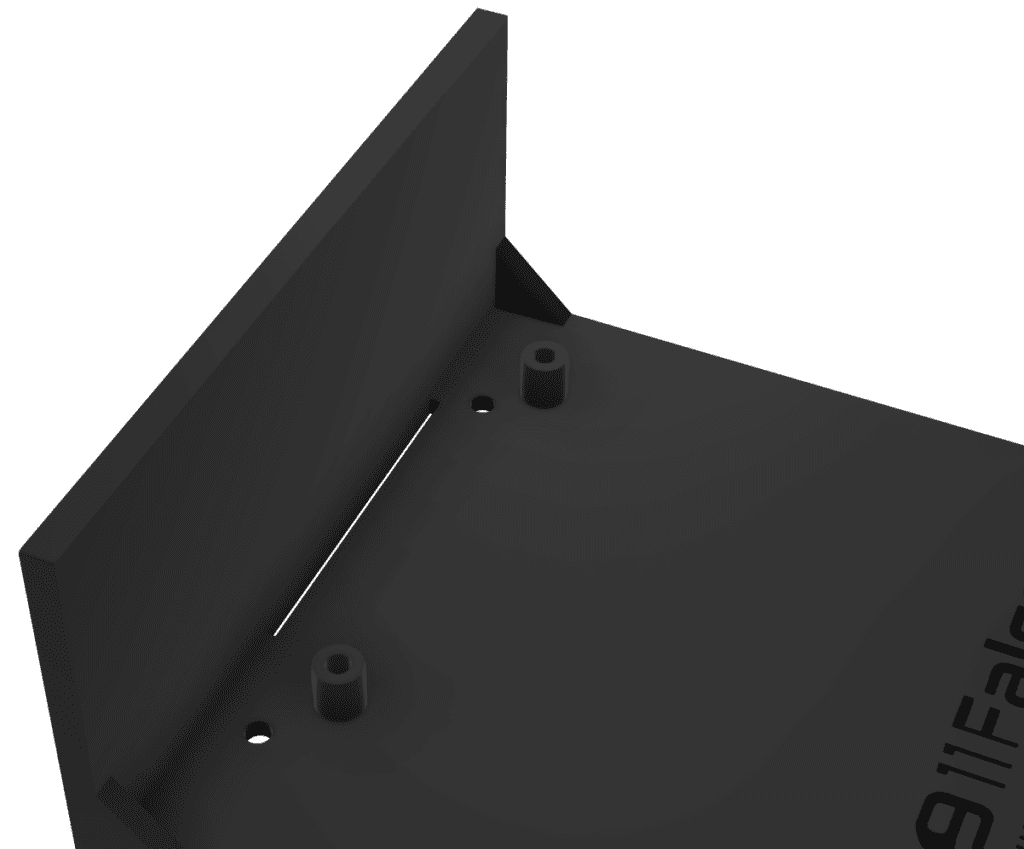
또한 프레임 구조상 Jetson Orin Nano를 직접 장착할 수 있는 적절한 마운트 홀이 마련되어 있지 않았기 때문에, 모터 고정 홀을 활용하여 스탠드오프를 세우고, 그 위에 Jetson Orin Nano 마운트를 볼팅하는 방식으로 설계했습니다. 이를 통해 프레임 상부 공간을 활용하면서도 다른 주요 부품과 구분된 형태로 연산장치를 장착할 수 있도록 했습니다.
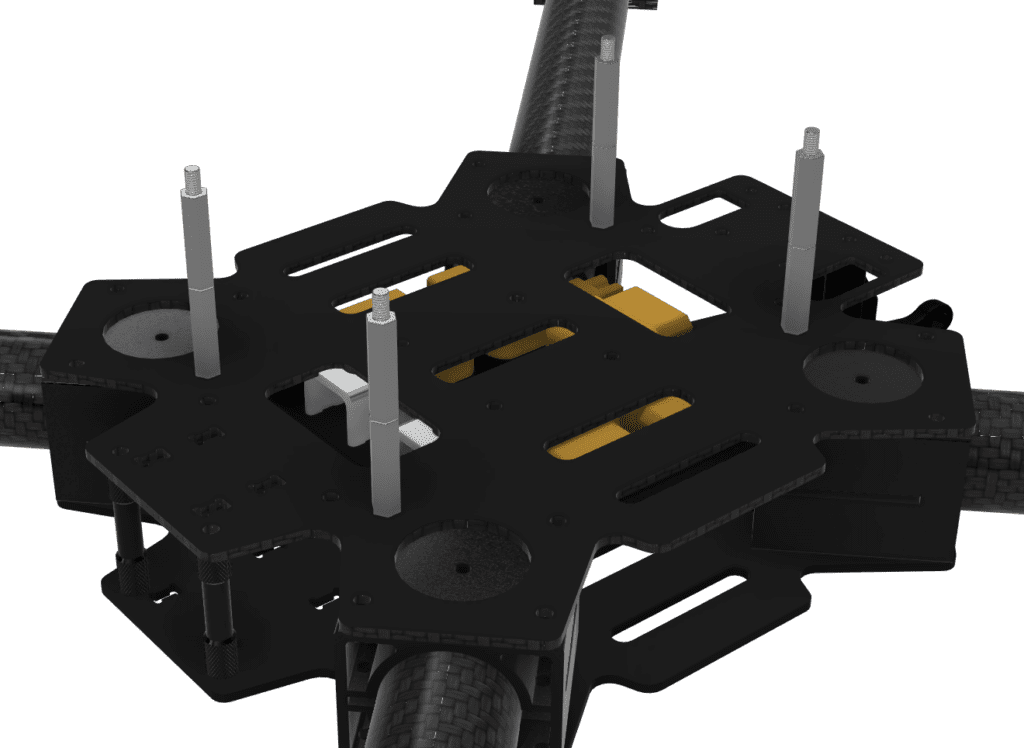

또한 마운트의 앞뒤에는 QUAD사 로고와 프로젝트 로고를 부착할 수 있는 면도 반영했습니다. 따라서 이번 Jetson Orin Nano 마운트는 보드 장착, Wi-Fi 안테나 고정, CSI 케이블 통로, 로고 부착 면을 함께 고려하여 설계했습니다.

1-4) ESC 마운트 설계
제품 :
XRotor PRO 60A ESC
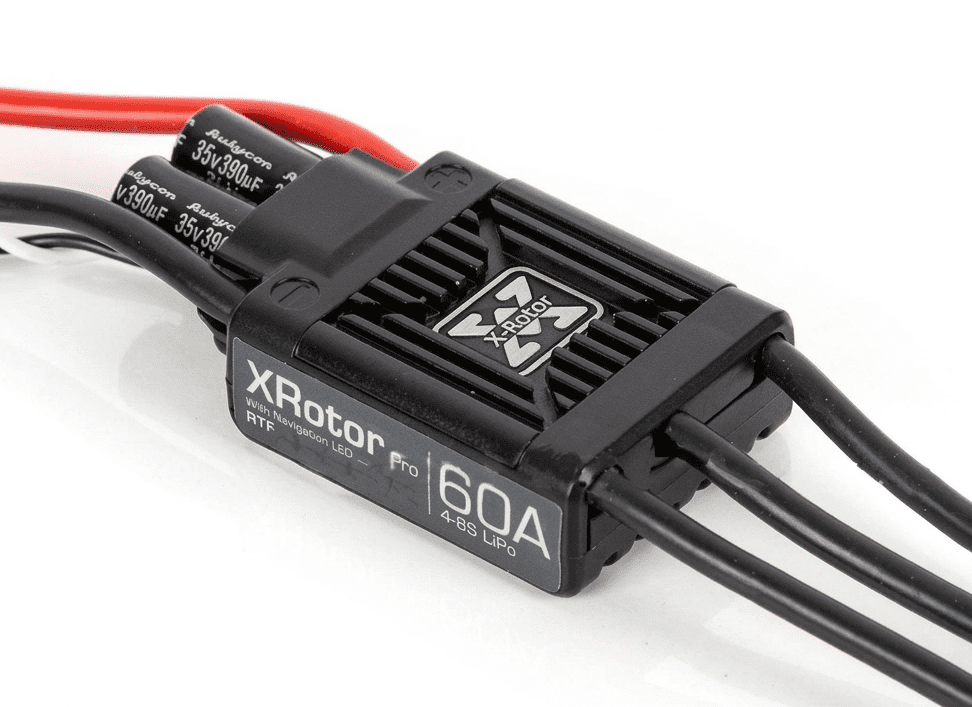
ESC 전용 마운트를 설계할 때 가장 먼저 고려했던 점은, ESC가 각 모터 마운트 하방에 배치되어야 한다는 점과 함께, 모터와의 연결성을 유지하면서도 발열이 원활하게 해소될 수 있어야 한다는 점이었습니다. ESC는 고전류를 처리하는 부품이기 때문에 모터와 가까운 위치에 있어야 하고, 동시에 완전히 밀폐된 구조보다는 공기가 통할 수 있는 형태가 필요했습니다.
하지만 프레임 구조상 ESC를 직접 고정할 수 있는 별도의 체결 홀은 마련되어 있지 않았고, ESC를 안전하게 고정하면서도 발열 해소를 방해하지 않아야 했습니다. 또한 별도의 독립 체결 구조를 추가하면 구조가 복잡해지고 체결 부품도 늘어나기 때문에, 가능한 한 기존 모터 마운트 체결 구조와 함께 결합될 수 있는 방식이 필요했습니다.

따라서 ESC 마운트는 모터 인서트와 모터 마운트를 볼팅할 때 함께 결속되는 구조로 설계했습니다. 이를 통해 별도의 독립 체결 구조를 최소화하면서도 ESC를 안정적으로 장착할 수 있도록 했습니다. 또한 ESC를 완전히 감싸지 않고 일부를 개방한 구조로 설계하여 공기가 통할 수 있도록 했고, 이를 통해 공랭이 가능하도록 했습니다. 결과적으로 이번 ESC 마운트는 모터 마운트와 함께 체결되면서도 냉각 성능을 확보할 수 있는 구조로 설계했습니다.


1-5) 랜딩기어 설계
랜딩기어 마운트를 설계할 때 가장 먼저 고려했던 점은, 랜딩기어가 암대에 결합되는 구조여야 한다는 점과 함께, 향후 기체 하부 구조 변경에 따라 랜딩기어 길이가 달라질 가능성까지 대응할 수 있어야 한다는 점이었습니다. 따라서 단순히 현재 길이에 맞춘 일체형 구조보다는, 이후 길이 변경이나 형상 수정에 유연하게 대응할 수 있는 방식이 필요했습니다.
하지만 기존 카본 암대에는 랜딩기어를 직접 체결할 수 있는 홀이 마련되어 있지 않았기 때문에, 기본 프레임 상태만으로는 바로 장착이 불가능했습니다. 또한 랜딩기어를 너무 단순한 구조로 설계하면, 추후 높이 조정이나 형상 변경이 필요할 때 전체 구조를 다시 제작해야 하는 문제가 있었습니다.
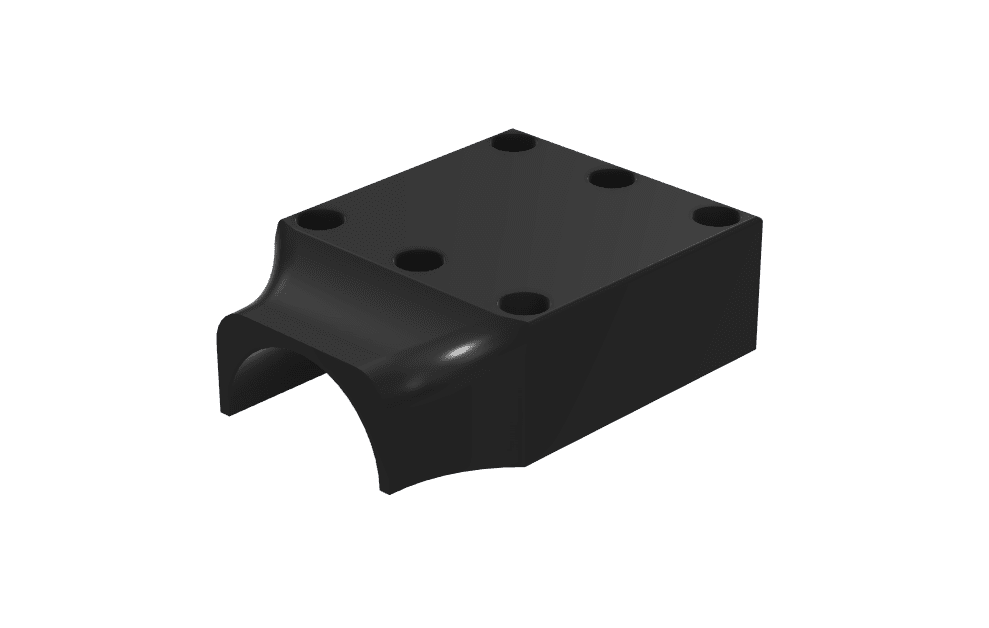
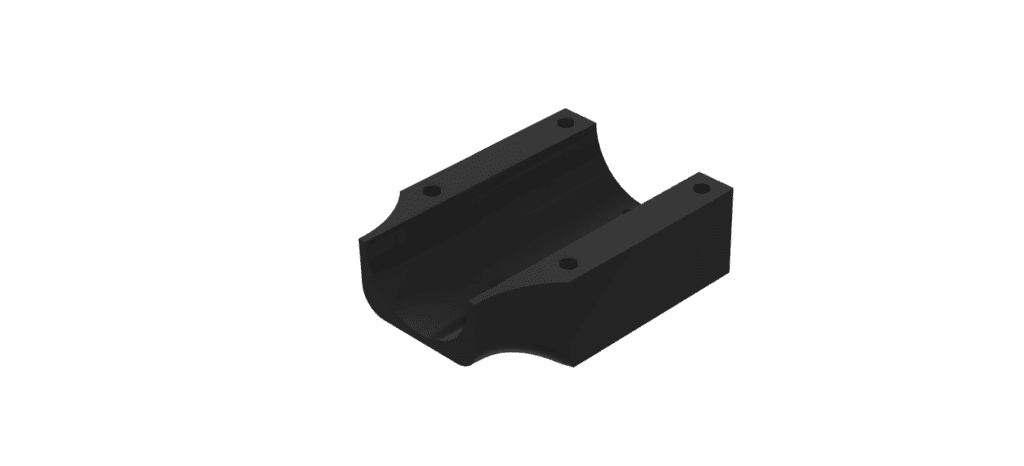
따라서 랜딩기어 마운트는 먼저 암대에 타공을 통해 체결용 구멍을 추가하는 방향으로 잡았고, 구조는 상단 마운트, 하단 마운트, 랜딩기어 본체가 볼팅으로 함께 결속되는 방식으로 설계했습니다. 이론적으로는 상단 마운트와 하단 마운트+랜딩기어를 하나로 묶어 단순화할 수도 있었지만, 향후 랜딩기어 길이 변경 가능성을 고려해 분리형 구조로 설계했습니다. 결과적으로 이번 랜딩기어 마운트는 단순 고정용 부품이 아니라, 향후 기체 하부 구조 변경 가능성까지 고려한 확장형 장착 구조로 설계했습니다.

이번 글에서는 911 FALCON 드론의 주요 부품 가운데 별도의 장착 구조가 필요한 부품들을 중심으로 전용 마운트 설계 과정을 정리해 보았습니다. 각 마운트는 단순히 부품을 고정하는 데 그치지 않고, 제한된 내부 공간, 기존 프레임과의 간섭, 발열, 진동, 배선 및 케이블 통로, 그리고 향후 구조 변경 가능성까지 함께 고려하여 설계했습니다.
특히 PDB와 Power Module은 중앙부 적층 공간 안에서 함께 배치될 수 있도록 구조를 정리했고, Pixhawk 6X는 하부 구조와의 간섭을 해소하면서도 진동 저감 구조를 반영했습니다. NVIDIA Jetson Orin Nano는 안테나와 CSI 케이블 경로까지 함께 고려한 상부 적층 마운트로 설계했으며, ESC와 랜딩기어 역시 실제 체결 방식과 운용 조건을 반영하여 전용 구조를 마련했습니다.
다음 편에서는 이번에 설계한 전용 마운트를 실제 기체에 적용하는 과정과 함께, 주요 부품 조립 및 기타 부품 배치 과정을 중심으로 이어서 정리해 보겠습니다. 감사합니다.

작성자: 이근찬, 쿼드(QUAD) 드론연구소 선임연구원
기고일: 2026.03.31
![PX4 MAVSDK – C++ Programming [3편] MAVSDK C++ 설치 및 SITL 시뮬레이션 환경 구축](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0313_인포그래픽-768x419.jpg)
![ROS2 Mastery [Part 1] Complete Guide to ROS2 Jazzy Development Environment and Workspace](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0330_인포그래픽-1-768x429.png)
![[PX4 Tuning Series 6] Trajectory Generator and Setpoint Tuning: The Art of Flight Feel and Smooth S-Curves](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Drone-Trajectory-Comparison-768x429.png)
![PX4 MAVSDK – C++ Programming [Part 2] Core C++ Syntax for MAVSDK](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0312_인포그래픽-768x768.jpg)
![PX4 MAVSDK – C++ Programming [Part 9] Precision Drone Control: Offboard Mode](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0319_인포그래픽-768x429.jpg)