
드론 전장 시스템 : 911 FALCON 프로젝트
안녕하세요, 쿼드(QUAD) 드론연구소의 이근찬 선임연구원입니다.
지난 편에서는 911 FALCON 드론의 배터리 하우징 설계 과정을 정리했습니다. XT90 접점 설계, 볼팅 구조, 락킹 시스템, 아이디얼 다이오드, 방열 홀까지 핫스왑 운용에 필요한 요소들을 하우징 설계 단계에서 함께 반영했으며, 슬라이드 결착 동작만으로 전원 접점이 자동으로 맞물리고, 락킹으로 고정되며, 방열까지 함께 이루어지는 구조로 전체 하우징을 구성했습니다.
이번 편부터는 본격적으로 드론 세팅 과정을 다루겠습니다. 드론 세팅은 모터 배선, 수신기 설정, 영상 시스템, 잿슨나노 연결 등 여러 단계로 이루어지는데, 그 모든 과정의 기반이 되는 전장 시스템을 먼저 정리하고 넘어가겠습니다.
이번 글에서는 배터리부터 각 부품까지 전원이 어떻게 공급되는지, 전체 전원 공급 흐름을 정리해 보겠습니다.
드론의 전장 시스템 개요
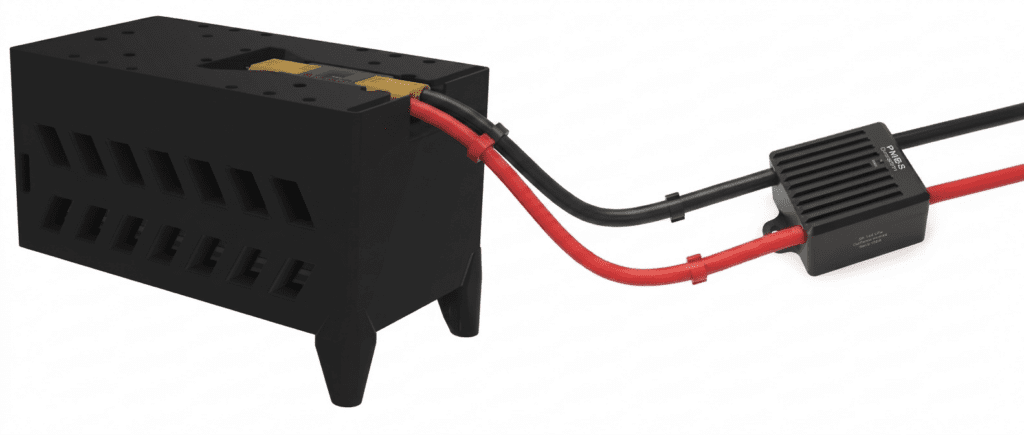
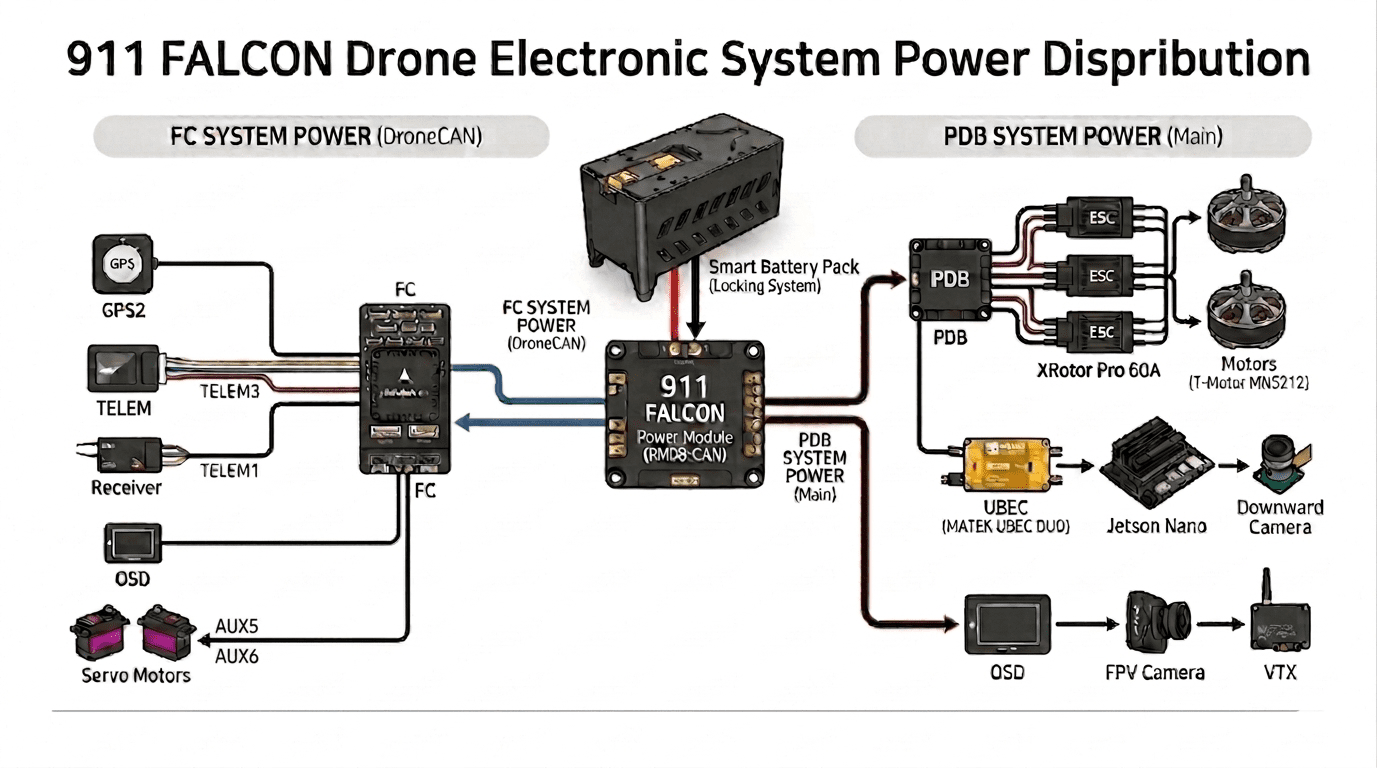
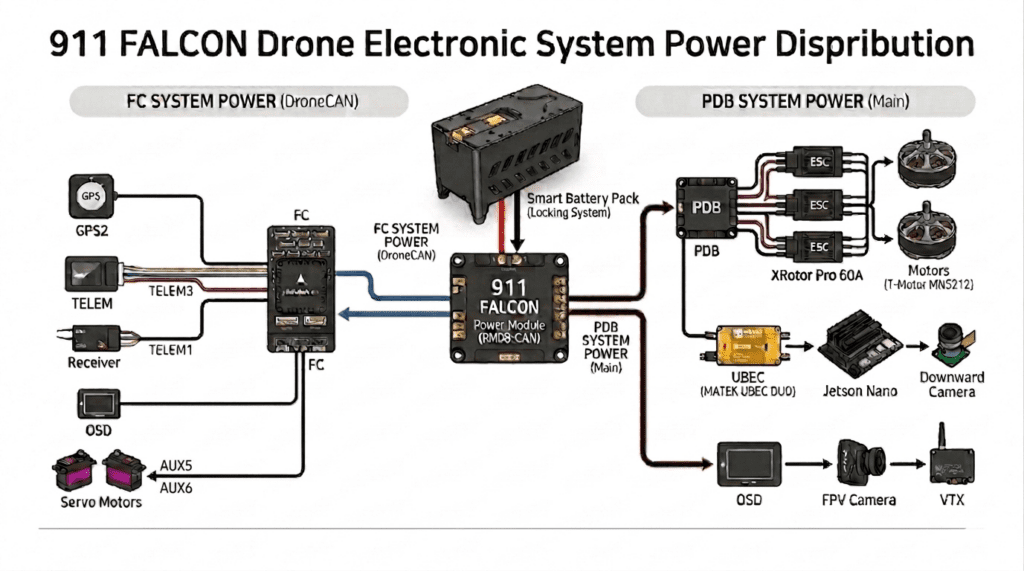
드론의 전장 시스템은 배터리에서 출력된 전원이 파워모듈을 거쳐 각 부품으로 분배되는 전원 계통과, FC를 중심으로 주변장치가 연결되는 신호 계통으로 구성됩니다. 911 FALCON 역시 이러한 구조를 기반으로 하며, 배터리에서 출력된 전원이 파워모듈(PM08-CAN) 로 입력되는 것을 시작으로 전장 시스템이 구성됩니다.
파워모듈에서 전원은 FC 계통과 PDB 계통 두 갈래로 분기되어 전체 시스템에 공급됩니다.
- FC 계통: 파워모듈 측면의 6핀 커넥터를 통해 FC에 전원과 DroneCAN 통신이 연결됩니다.
- PDB 계통: 파워모듈의 메인 전원선을 통해 PDB로 전원이 공급되며, PDB에서 각 부품으로 분배됩니다.
아래에서는 FC 계통과 PDB 계통으로 나누어 각 장치의 배선을 순서대로 정리해 보겠습니다.
1. FC 계통
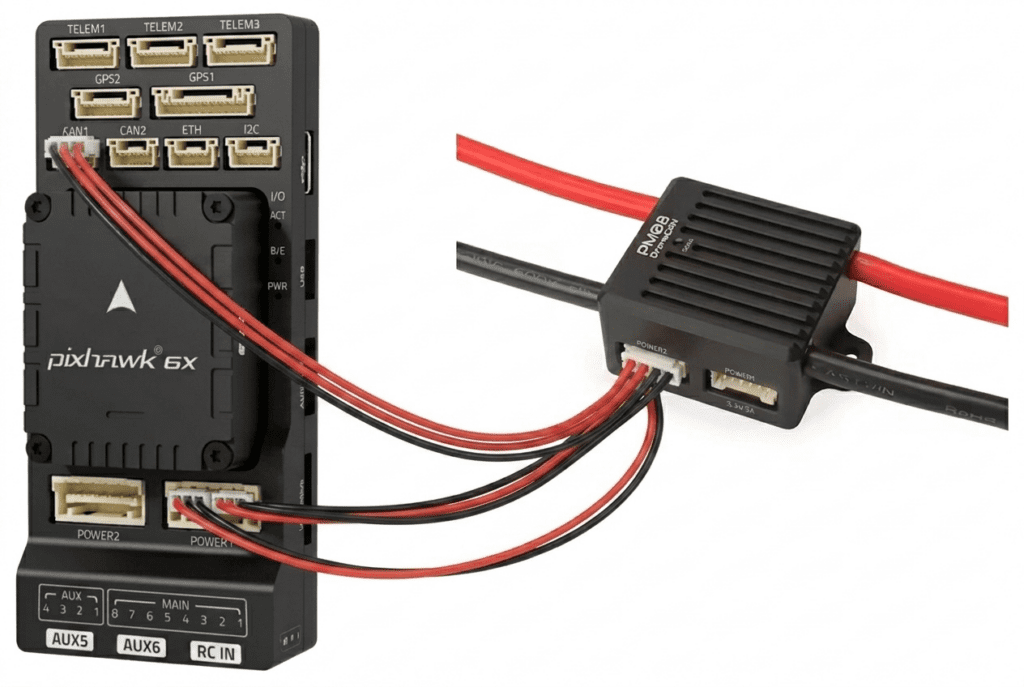
파워모듈 측면의 6핀 커넥터에서 나오는 케이블은 전원선과 CAN 통신선이 함께 포함된 구성입니다. 일반적으로 FC의 전원 포트는 I2C 통신 기반의 파워모듈을 기준으로 설계되어 있어, I2C를 지원하는 파워모듈을 사용하면 별도의 배선 없이 배터리 잔량 확인이 가능합니다. 그러나 파워모듈(PM08-CAN)은 DroneCAN 통신만 지원하기 때문에, 6핀 케이블에서 전원선과 CAN 통신선을 분리하여 각각 FC의 전원 포트와 CAN 포트에 별도로 배선하는 방식으로 인가했습니다.
1-1. FC

FC(Pixhawk 6X) 는 다양한 주변장치에 전원과 신호를 공급합니다. 각 장치는 FC의 지정된 포트에 연결됩니다.
(1) GPS

GPS는 드론의 위치·고도·속도 정보를 실시간으로 측정하여 FC에 전달하는 역할을 합니다. gps1 포트에 연결되며, FC는 이 데이터를 바탕으로 자율비행 및 위치 유지 기능을 수행합니다.
(2) 텔레메트리

텔레메트리는 드론과 지상국 간의 무선 데이터 통신을 담당합니다. FC의 gps2 포트에 연결되며, 비행 상태·배터리 잔량·GPS 좌표 등의 데이터를 지상국으로 실시간 전송합니다.
(3) 수신기

수신기는 조종사의 조종기 입력 신호를 수신하여 FC에 전달하는 역할을 합니다. telem1 포트에 연결되며, FC는 이 신호를 바탕으로 모터 출력과 기체 자세를 제어합니다.
(4) OSD

OSD는 FC로부터 비행 데이터를 받아 FPV 영상 위에 오버레이하는 역할을 합니다. telem3 포트에 연결되며, 배터리 전압·비행 속도·고도 등의 기체 상태 정보와 함께 OSD 동작을 위한 전원이 함께 인가됩니다.
(5) 서보모터
서보모터는 카메라 각도 조절을 위한 짐벌 제어에 사용됩니다. aux 5, 6번 포트에 연결되며, 조종기 제어에 따라 짐벌의 틸트·롤 축을 구동합니다.
2. PDB 계통
파워모듈의 메인 전원선은 PDB로 연결됩니다. 파워모듈과 PDB 사이는 원래 XT90 커넥터로 연결되는 구조이나, 기체 내부 공간이 협소하여 커넥터를 제거하고 직접 납땜 방식으로 연결했습니다. PDB에서는 각 부품으로 전원이 분배됩니다.
2-1. ESC

PDB에서 각 ESC(XRotor PRO 60A) 로의 전원 공급은 XT90 커넥터를 통해 연결됩니다. 각 ESC는 배터리 전압을 그대로 받아 모터(T-Motor MN5212) 를 구동하며, ESC의 신호선은 FC의 aux 1, 2, 3, 4번 포트에 각각 연결되어 FC로부터 모터 제어 신호를 수신합니다.
(1) 모터

ESC로부터 전원을 공급받아 모터(T-Motor MN5212) 를 구동합니다. ESC는 FC의 제어 신호에 따라 배터리 전압을 그대로 모터에 인가하여 회전수를 제어합니다.
2-2. OSD
PDB에서 OSD(Holybro Micro OSD V2) 로 전원이 공급됩니다. 이 전원은 OSD 자체의 동작을 위한 것이 아니라, FPV 카메라와 VTX에 전원을 분배하기 위한 경로로 활용됩니다.
(1) FPV 카메라

OSD를 통해 전원을 공급받으며, 카메라 영상 신호가 OSD를 거쳐 VTX로 전달됩니다.
(2) VTX

OSD로부터 전원과 영상 신호를 함께 받아 무선으로 영상을 송출합니다.
2-3. UBEC
PDB에서 UBEC(MATEK UBEC DUO) 로 전원이 공급됩니다. UBEC는 배터리 전압을 12V로 강압하여 잿슨나노에 안정적인 전원을 공급하는 역할을 합니다.
(1) 잿슨나노

UBEC로부터 배럴잭을 통해 12V 전원을 공급받습니다.
(2) 하방 카메라
잿슨나노와 CSI 케이블로 연결되며, 정밀착륙 시 착륙 지점을 인식하는 데 사용됩니다.
전장 시스템 구조 요약
아래는 911 FALCON 드론의 전장 시스템 전체 전원 공급 구조를 정리한 것입니다.
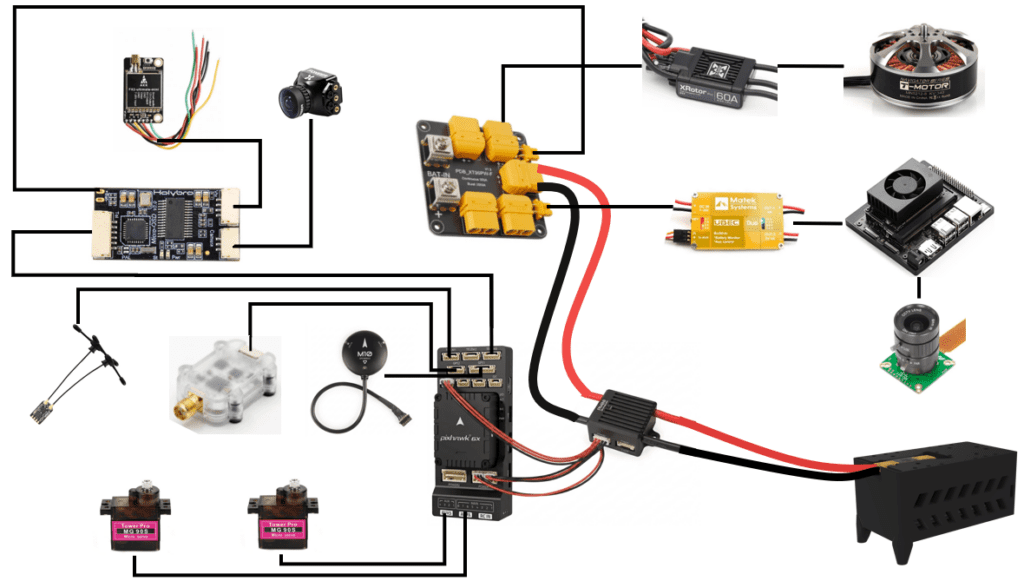
배터리를 시작으로 파워모듈을 거쳐 FC 계통과 PDB 계통 두 갈래로 전원이 분기되며, 각 부품에 전원이 공급되는 구조로 구성했습니다.
이번 글에서는 911 FALCON 드론의 전장 시스템 전체 전원 공급 흐름을 정리했습니다. 파워모듈을 기준으로 FC 계통과 PDB 계통 두 갈래로 나뉘어 각 부품에 전원이 공급되는 구조를 확인했습니다.
다음 편에서는 이번에 정리한 전장 시스템을 바탕으로, 수신기 배선 및 세팅 과정을 다루겠습니다. 조종기 채널 설정과 ELRS 버전 확인부터 수신기 배선·펌웨어 업데이트·바인딩, 그리고 FC의 파라미터 설정과 비행 모드 설정까지 순서대로 정리해 보겠습니다. 감사합니다.

작성자: 이근찬, 쿼드(QUAD) 드론연구소 선임연구원
기고일: 2026.05.06

![[하이브리드 항법 시스템: 제6편] [구현-2단계] 중간 보정 단계: OpenCV/YOLO 지형지물 대조 및 Digital Twin 테스트](https://quad-drone-lab.co.kr/wp-content/uploads/2026/06/Absolute_Visual_Localization_for_UAVs-768x429.jpg)
![[Hybrid Navigation System: Special Edition] Survive GPS Jamming! A Complete Guide to “PX4 Dead-Reckoning Mode”](https://quad-drone-lab.co.kr/wp-content/uploads/2026/05/Resilient_Drone_Dead-Reckoning_Navigation-768x429.jpg)
![[하이브리드 항법 시스템: 제4편] ROS 2를 활용한 PX4와 외부 INS 오도메트리 연계 및 통신 검증](https://quad-drone-lab.co.kr/wp-content/uploads/2026/04/Drone-Navigation-Data-Integration-Flow-768x429.jpg)