
[연재 안내] 드론 연구자와 학생을 위한 완벽 가이드: PX4 튜닝의 모든 것
항공우주공학을 전공하는 대학생, 대학원생, 그리고 자율비행 드론을 연구하시는 연구원 여러분, 안녕하세요!
연구실에서 목적에 맞게 직접 조립한 드론이 생각처럼 날지 않거나, 원인을 알 수 없는 진동과 불안정한 호버링 때문에 비행 테스트를 망쳐본 경험이 한 번쯤은 있으실 겁니다. 오픈소스 비행 제어 소프트웨어인 PX4는 매우 강력하고 다양한 기능을 제공하지만, 그만큼 수많은 파라미터가 존재하여 처음 접하는 분들에게는 튜닝 과정이 거대한 장벽처럼 느껴지기 쉽습니다.
이러한 어려움을 겪고 계신 분들을 위해, 복잡한 공식이나 난해한 매뉴얼 대신 **실제 비행 테스트와 직관적인 로그 분석을 바탕으로 한 ‘PX4 튜닝 연재 블로그’**를 시작합니다! 이번 연재에서는 드론 튜닝의 기초적인 하드웨어 점검부터 고급 PID 제어, 그리고 특수 목적의 비행 최적화까지 단계별로 친절하게 안내해 드릴 예정입니다.
앞으로 연재될 블로그의 핵심 내용들을 미리 살펴볼까요?
시리즈 1: PX4 튜닝의 기초 및 하드웨어 준비
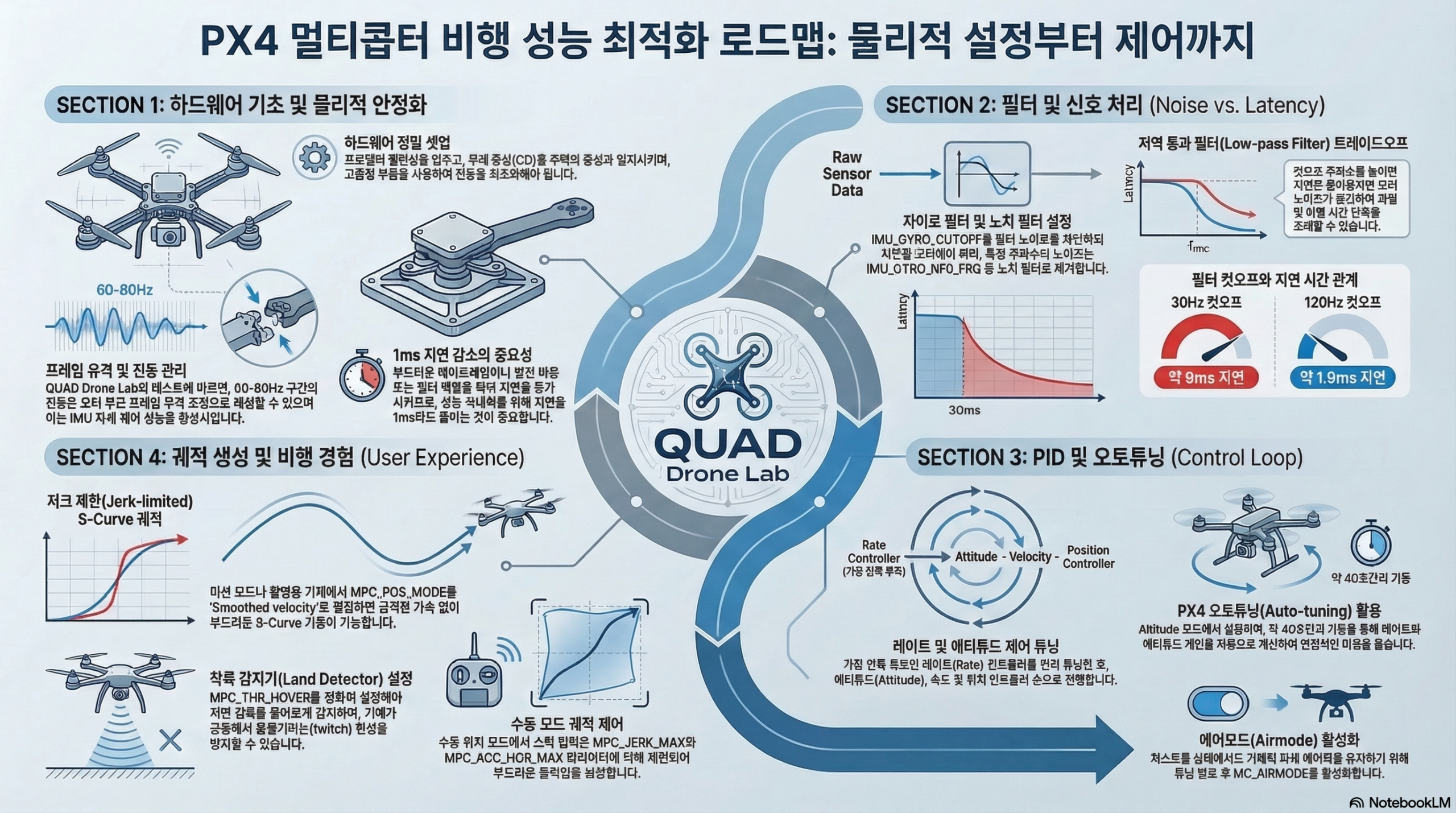
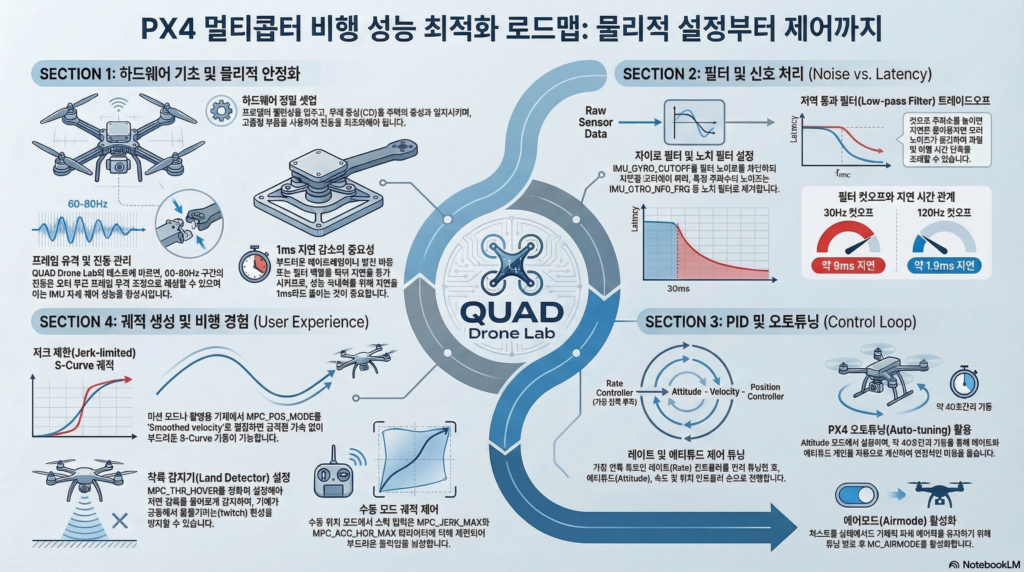
- 비행 전 하드웨어 점검: 고품질의 프레임, 모터, 프로펠러를 사용하고 균형 잡힌 프로펠러를 사용하여 진동을 최소화하는 하드웨어 구성 방법에 대해 다룹니다. 모터 쪽 프레임 유격을 꽉 조여주는 것도 진동을 줄이는 중요한 요소입니다.
- 제어 지연(Control Latency)의 이해: 물리적인 외란이 발생했을 때 모터가 반응하기까지의 지연 시간을 줄여 비행 성능을 향상시키는 방법(예: DShot 활성화, AUX 핀 사용 등)을 설명합니다.
시리즈 2: 진동 잡기와 필터 튜닝 (Filter Tuning)
- 로그 분석을 통한 진동 진단: 비행 후 고주파 로깅 프로필을 활성화하여 수집한 비행 로그(Actuator Controls FFT 플롯)를 분석하고, IMU 및 제어기에 영향을 주는 진동 주파수(예: 60~80Hz 대역)를 찾아내는 과정을 설명합니다.
- 저대역 통과 및 노치 필터 설정: 지연 시간을 줄이면서도 모터 과열이나 떨림을 방지하기 위해 자이로 컷오프(IMU_GYRO_CUTOFF)와 D-term 컷오프(IMU_DGYRO_CUTOFF)를 튜닝하는 방법과 정적/동적 노치 필터(Notch Filter) 적용법을 알아봅니다.
시리즈 3: 초보자를 위한 수동 PID 튜닝 (Manual/Basic PID Tuning)
- PID 제어기의 원리와 튜닝 순서: 가장 낮은 수준의 제어기인 속도(Rate) 제어기부터 자세(Attitude), 속도 및 위치(Velocity & Position) 제어기 순으로 진행되는 튜닝 절차를 안내합니다.
- QGroundControl을 활용한 실시간 튜닝: QGroundControl의 PID 튜닝 화면을 통해 설정값(Setpoint)과 반응 곡선(Response)을 실시간으로 확인하며 P(비례), I(적분), D(미분) 게인을 조정해 오버슈트나 진동 없이 빠른 반응을 이끌어내는 방법을 다룹니다.
시리즈 4: 고급 PID 튜닝 및 비행 최적화 (Advanced PID Tuning)
- 속도 제어기 아키텍처: 표준(Standard) 및 병렬(Parallel) 형태의 PID 컨트롤러 아키텍처 차이점을 설명하고, 각 형태에 맞는 게인 설정 기준을 다룹니다.
- 추력 곡선(Thrust Curve) 보상: 호버링 추력 주변이 아닌 최대 스로틀 구간에서 발생하는 진동을 잡기 위해 THR_MDL_FAC 파라미터로 모터 제어 신호와 실제 추력 간의 비선형성을 보상하는 방법을 설명합니다.
- 에어모드(Airmode)와 믹서 포화(Mixer Saturation): 낮은 스로틀이나 스로틀이 0인 상태에서도 기체 제어를 유지하여 비행 성능을 높이는 에어모드의 원리와 설정 방법을 안내합니다.
시리즈 5: 자동 튜닝 (Auto-Tuning)
- 사전 튜닝 테스트: 자동 튜닝을 실행하기 전, 1m 높이에서 호버링하며 기체가 2번의 진동 이내에 자세를 회복할 수 있는지 확인하는 안정성 평가 방법을 소개합니다.
- 오토 튜닝 절차 및 문제 해결: 고도 모드에서 비행 중 자동 튜닝을 활성화하여 약 40초 동안 자동으로 Rate 및 Attitude 제어기를 튜닝하는 방법과, 튜닝 전후로 발생하는 발진(Oscillation) 현상 해결 방법을 다룹니다.
시리즈 6: 궤적 생성기 및 셋포인트 튜닝 (Trajectory Generator Tuning)
- 조종감(User Experience) 튜닝: 조종기 스틱 입력(Demanded setpoint)이 기체의 목표 셋포인트(Desired setpoint)로 변환되는 과정을 튜닝하여, 기체가 부드럽고 덜 갑작스럽게 반응하도록 만드는 개념을 설명합니다.
- 가속도 기반 및 Jerk 제한 궤적: 위치 모드에서 기본값으로 쓰이는 가속도 기반 제어와, 촬영이나 매핑처럼 부드러운 S-Curve 형태의 기동이 필요할 때 사용하는 Jerk 제한(Jerk-limited) 궤적 제어의 설정 방법(MPC_POS_MODE)을 비교합니다.
시리즈 7: 착륙 감지기 설정 (Land Detector Configuration)
- 착륙 감지기의 3단계 상태: 기체가 ‘지면 접촉(Ground Contact)’에서 ‘착륙 가능성(Maybe Landed)’, 최종 ‘착륙(Landed)’ 상태로 판별되는 조건(수직/수평 속도, 회전, 추력 등)을 상세히 알아봅니다.
- 호버 추력 최적화 및 자동 시동 꺼짐: 고도 제어의 정확성과 올바른 착륙 감지를 위해 시스템 호버 추력(MPC_THR_HOVER)을 올바르게 설정하는 방법과, 착륙 후 모터가 자동으로 꺼지는 시간(COM_DISARM_LAND) 설정 방법을 다룹니다.
부록: 레이싱 드론 튜닝 가이드 (Racer Setup)
지연 시간 최소화: 레이싱 기체 특성상 더욱 빠른 응답성을 확보하기 위해 필터 튜닝과 제어 지연(Latency)을 극한으로 줄이는 튜닝 팁을 요약합니다.
레이서를 위한 특수 설정: GPS나 지자계 센서가 없는 레이싱 기체를 위한 Q 자세 추정기 설정 및 페일세이프(Lockdown) 적용법을 안내합니다.
드론 제어는 단순히 숫자를 입력하는 것이 아니라, 하드웨어와 소프트웨어가 상호작용하는 과정을 이해하고 기체와 ‘대화’하는 과정입니다. 이번 연재 블로그가 연구실에서 밤낮으로 드론과 씨름하는 여러분의 시간과 노력을 크게 덜어주고, 성공적인 비행과 연구 성과로 이어지는 든든한 나침반이 되기를 바랍니다.
곧 공개될 첫 번째 시리즈, “PX4 튜닝의 기초 및 하드웨어 준비” 편에서 뵙겠습니다. 많은 기대와 관심 부탁드립니다!
YouTube 강좌

Author: maponarooo, CEO of QUAD Drone Lab
Date: March 5, 2026
![PX4 MAVSDK – C++ Programming [Part 9] Precision Drone Control: Offboard Mode](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0319_인포그래픽-768x429.jpg)


![PX4 MAVSDK – C++ Programming [Episode 11] Complete Comparison of MAVSDK vs MAVROS vs uXRCE-DDS](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0322_인포그래피-768x512.png)
![PX4 MAVSDK – C++ Programming [3편] MAVSDK C++ 설치 및 SITL 시뮬레이션 환경 구축](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0313_인포그래픽-768x419.jpg)