[드론 배터리의 모든 것]Part 3: 고전압 시스템으로의 진화: 6S, 8S, 그리고 12S의 세계
안녕하세요! 드론의 하드웨어와 소프트웨어를 아우르며 비행의 한계를 돌파하고 계신 드론 개발자 및 엔지니어 여러분. 지난 연재에서는 배터리의 핵심 스펙인 방전율(C-Rating)의 실체와 내부 저항(IR)이 비행에 미치는 물리적 영향에 대해 다루어 보았습니다.
오늘 연재의 세 번째 파트에서는 최근 소형 FPV부터 대형 산업용 드론에 이르기까지 드론 업계의 가장 거대한 패러다임 전환인 **’고전압(High-Voltage) 시스템으로의 진화’**에 대해 심층적으로 다루어 보겠습니다. 시스템 전압을 4S에서 6S, 8S, 그리고 12S 이상으로 높이는 것이 단순한 출력 증가를 넘어, 기체의 효율성, 변속기(ESC)의 안정성, 그리고 펌웨어(PX4/ArduPilot) 통합 관점에서 개발자들에게 어떤 실질적인 이점을 제공하는지 상세히 파헤쳐 보겠습니다.
1. 왜 고전압(High-Voltage) 시스템인가?: 전기적 효율성의 물리학과 I²R
드론의 탑재 중량(Payload)이 늘어나고 요구되는 체공 시간이 길어질수록, 모터가 필요로 하는 총 요구 전력(Power, W)은 급격히 상승합니다. 전력의 물리적 공식은 잘 아시다시피 P=V×I 입니다.
동일한 1,000W의 추력을 내야 하는 상황을 가정해 보겠습니다. 전압(V)이 낮다면 필연적으로 엄청난 양의 전류(I)를 끌어와야 합니다. 문제는 여기서 발생합니다. 기체의 배선, 커넥터, 변속기(ESC)의 FET, 모터의 권선에는 모두 미세한 저항(R)이 존재하며, 전류가 흐를 때 열로 낭비되는 전력 손실(Joule Heating)은 다음 공식에 의해 결정됩니다.
열 손실(Ploss) = I2×R
열 손실은 전류의 **’제곱’**에 비례합니다. 즉, 전압을 2배로 높여 전류를 절반으로 줄이면, 발열과 에너지 손실은 1/2이 아닌 1/4로 급감합니다.
개발자 입장에서 고전압 시스템의 도입은 다음과 같은 엄청난 이득을 연쇄적으로 가져옵니다.
- 배선 경량화: 엄청난 전류를 감당하기 위한 무거운 8AWG 전선을 10AWG나 12AWG로 얇게 줄일 수 있어 기체 경량화가 가능합니다.
- ESC 스트레스 감소: 변속기의 스위칭 소자(MOSFET)에 가해지는 열적 부하가 급감하여 과열로 인한 ESC 컷오프나 화재 위험이 사라집니다.
- 전압 강하(Voltage Sag) 최소화: 급격한 스로틀 펀치 시 발생하는 배터리 내부 전압 강하가 줄어들어 비행 후반부에도 일정한 추력을 유지할 수 있습니다.

2. 5인치 FPV 및 소형 드론의 새로운 표준: 6S (22.2V)
불과 몇 년 전만 해도 5인치 프리스타일이나 레이싱 드론 개발의 표준은 4S(14.8V) 시스템이었습니다. 하지만 현재는 대부분의 시스템이 6S(22.2V, 완충 시 25.2V) 로 넘어왔습니다.
[개발자를 위한 6S 튜닝 포인트] 기존 4S 시스템에서 6S로 전환하면 모터에 공급되는 전류가 크게 줄어듭니다. 이는 드론의 비행 제어기(FC) 관점에서 볼 때, 스로틀 반응성(Throttle Response)이 훨씬 날카롭고 선형적으로 변함을 의미합니다. 급강하 후 스로틀을 올릴 때 발생하는 프로펠러 후류(Prop Wash) 현상을 제어하기가 훨씬 수월해지며, PID 튜닝 시 D값(Derivative)의 여유 폭이 넓어지는 장점이 있습니다. 최근에는 6S 1000mAh ~ 1300mAh 용량의 LiHV(초고전압 리튬 폴리머, 셀당 4.35V) 배터리가 결합되어 무게는 유지하면서 에너지 밀도를 극대화하는 추세입니다.
3. 익스트림 파워와 시네리프터의 영역: 8S (29.6V)와 Molicel P45B
무거운 시네마 카메라(RED, ARRI 등)를 싣고 시속 100km 이상으로 아크로바틱 기동을 해야 하는 시네리프터(Cine-lifter)나 대형 X8 배열의 드론 개발자들은 8S (29.6V 공칭전압, 최대 33.6V) 시스템을 채택하고 있습니다.
이 영역에서 팩을 커스텀 설계할 때 가장 각광받는 셀이 바로 Molicel P45B (INR21700-P45B) 입니다.
- 스펙적 우위: 21700 폼팩터인 이 셀은 약 243 Wh/kg의 우수한 에너지 밀도와 더불어, 무려 45A의 극단적인 연속 방전을 지원합니다.
- 8S4P 커스텀 설계: 이 셀을 8S4P(직렬 8, 병렬 4)로 구성하면 총 32셀로 약 18Ah의 용량과 최대 180A의 연속 방전이 가능한 괴물 같은 팩이 완성됩니다.
- 신뢰성: AS9100:D (항공우주 품질경영) 인증을 받은 셀이므로 고가의 페이로드를 싣는 기체에 신뢰성을 담보할 수 있습니다.
개발자들은 8S 배터리 설계 시, 폭발적인 전류를 병목 없이 전달하기 위해 순동(Copper) 샌드위치 니켈 버스바를 스팟 용접하고, 튼튼한 FR4 에폭시 보드로 구조적 강성을 확보하는 것이 중요합니다.
4. 대형 산업 및 농업용 드론의 산업 표준: 12S (44.4V)와 스마트 BMS
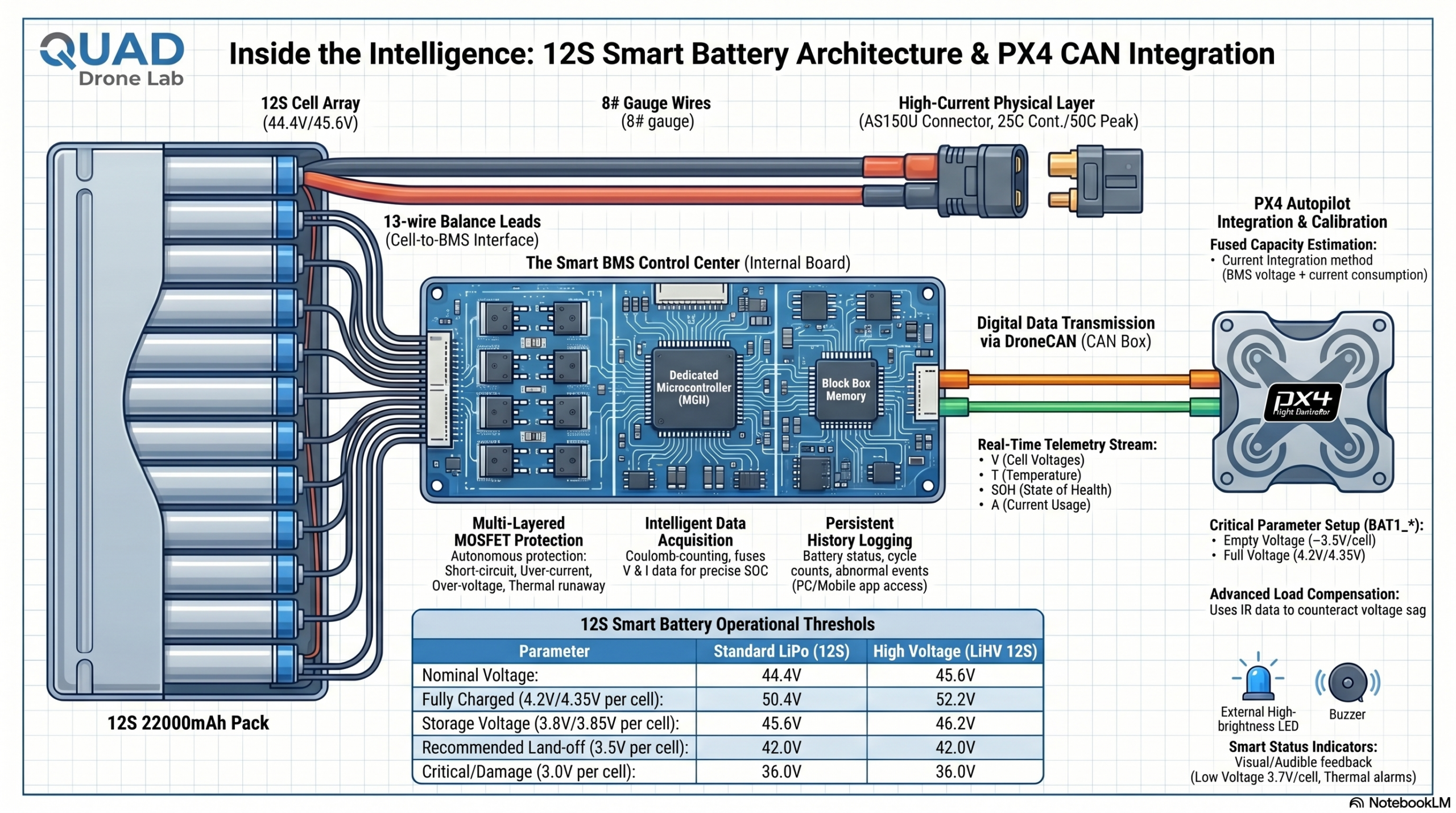
MTOW(최대 이륙 중량)가 20kg~50kg에 육박하는 농업용 방제 드론, 물류 배송, 장거리 매핑 드론 분야에서는 12S (44.4V 공칭전압, 최대 50.4V) 가 확고한 산업 표준입니다. 이 체급에서는 단순한 배터리 셀의 묶음을 넘어, 스마트 배터리 관리 시스템(BMS) 의 소프트웨어적 통합이 개발의 핵심이 됩니다.
[전류의 극적 감소] 예를 들어 2,000W의 전력을 소모할 때, 4S 시스템은 무려 135A의 가혹한 전류를 변속기에 가하지만, 12S 시스템은 단 45A만을 요구합니다. 이는 시스템 전체의 안정성을 비약적으로 끌어올립니다.
[Tattu 12S 스마트 배터리와 FC 통합 (PX4/ArduPilot)] 산업용 12S 팩(예: Tattu 12S 22000mAh)에는 강력한 BMS 칩이 내장되어 있습니다. 드론 개발자는 단순한 전원 공급을 넘어 CAN 버스(CAN Bus)나 SMBUS 통신 프로토콜을 통해 배터리와 비행 제어기(FC)를 연동해야 합니다.
- 지능형 통신: PX4나 ArduPilot 펌웨어는 BMS로부터 각 셀의 개별 전압, 현재 온도, SOH(건강 상태), 충방전 사이클 횟수 데이터를 실시간으로 받아옵니다. 이를 바탕으로 더욱 정밀한 ‘귀환(RTH) 남은 시간’을 계산합니다.
- 안티 스파크(Anti-Spark) 설계: 50V에 달하는 12S 배터리를 ESC에 연결할 때 발생하는 엄청난 스파크는 커넥터(AS150U 등)에 내장된 안티 스파크 저항 회로와 BMS의 협조로 차단됩니다.
- 자동 보관 모드(Smart Storage): 개발자가 기체 테스트 후 배터리를 만충 상태로 방치하더라도, BMS가 5일 후 스스로 이를 감지하여 내부 저항을 이용해 셀당 3.8V로 자동 방전시킵니다. 이는 배터리 스웰링(배부름)을 막는 궁극의 안전장치입니다.
5. Python으로 시뮬레이션 해보는 고전압 시스템의 효율성
드론 개발자로서 새로운 기체의 파워트레인을 설계할 때, 목표 전압에 따른 전류 소모량과 케이블/ESC에 가해지는 열 손실(I2) 비율을 미리 계산해 보는 것은 필수적입니다. 아래의 Python 예제 코드는 개발자 여러분이 시스템 설계 초기 단계에서 직렬(S) 구성에 따른 효율 개선을 직관적으로 시뮬레이션하고 시각화할 수 있도록 작성되었습니다.
import matplotlib.pyplot as plt
import pandas as pd
import numpy as np
# 개발 환경에 맞춘 한글 폰트 설정 (Windows 예시)
plt.rcParams['font.family'] = 'Malgun Gothic'
plt.rcParams['axes.unicode_minus'] = False
def simulate_hv_efficiency(target_power_w):
"""
동일한 요구 전력(W) 하에서, 배터리 직렬(S) 구성에 따른
소모 전류(A)와 상대적 열 손실 계수(I^2)를 시뮬레이션합니다.
"""
# 리튬 폴리머(LiPo) 배터리의 공칭 전압 기준 (셀당 3.7V)
systems = {
'4S (레거시 소형)': 14.8,
'6S (최신 FPV 표준)': 22.2,
'8S (시네리프터)': 29.6,
'12S (산업용 대형)': 44.4,
'14S (차세대 전고체)': 51.8
}
results = []
# 4S 시스템의 열 손실을 기준점(100%)으로 설정하기 위한 초기 계산
baseline_current = target_power_w / systems['4S (레거시 소형)']
baseline_heat_loss = baseline_current ** 2
for name, voltage in systems.items():
# I = P / V (필요 전류 계산)
current = target_power_w / voltage
# 열 손실은 전류의 제곱에 비례 (저항 R은 동일하다고 가정)
heat_loss_factor = current ** 2
# 4S 대비 상대적 열 손실 비율 계산 (%)
heat_loss_percent = (heat_loss_factor / baseline_heat_loss) * 100
results.append({
'System': name,
'Voltage (V)': voltage,
'Current (A)': round(current, 2),
'Heat Loss (%)': round(heat_loss_percent, 2)
})
return pd.DataFrame(results)
# --- 시뮬레이션 실행 ---
target_watts = 2000 # 중대형 드론의 호버링 요구 전력을 2000W로 가정
df = simulate_hv_efficiency(target_watts)
print(f"=== {target_watts}W 출력 시 드론 배터리 전압별 시스템 부하 비교 ===")
print(df.to_string(index=False))
print("-" * 60)
# --- 데이터 시각화 (전류 및 발열량 감소 그래프) ---
fig, ax1 = plt.subplots(figsize=(11, 6))
# X축: 시스템 종류
x = np.arange(len(df['System']))
width = 0.35
# 바 차트 1: 요구 전류 (A)
bars1 = ax1.bar(x - width/2, df['Current (A)'], width, label='요구 전류 (A)', color='#1f77b4')
ax1.set_ylabel('요구 전류 (A)', fontsize=12, color='#1f77b4')
ax1.tick_params(axis='y', labelcolor='#1f77b4')
ax1.set_xticks(x)
ax1.set_xticklabels(df['System'], rotation=15, ha='right', fontsize=10)
# 보조 축 생성
ax2 = ax1.twinx()
# 바 차트 2: 상대적 열 손실 (%)
bars2 = ax2.bar(x + width/2, df['Heat Loss (%)'], width, label='4S 대비 열 손실 (%)', color='#ff7f0e')
ax2.set_ylabel('열 손실 비율 (%)', fontsize=12, color='#ff7f0e')
ax2.tick_params(axis='y', labelcolor='#ff7f0e')
ax2.set_ylim(0, 110)
# 데이터 라벨 추가
for bar in bars1:
yval = bar.get_height()
ax1.text(bar.get_x() + bar.get_width()/2, yval + 1, f'{yval}A', ha='center', va='bottom', fontsize=10)
for bar in bars2:
yval = bar.get_height()
ax2.text(bar.get_x() + bar.get_width()/2, yval + 1, f'{yval}%', ha='center', va='bottom', fontsize=10)
plt.title(f'드론 전압 시스템별 전류 감소 및 발열 제어 효과 ({target_watts}W 부하 기준)', fontsize=15, fontweight='bold')
fig.tight_layout()
plt.show()
위 파이썬 스크립트를 개발 환경에서 실행해 보시면, 2000W 출력을 낼 때 4S 시스템이 약 135A의 살인적인 전류를 요구하며 모든 배선을 불태울 듯이 끓어오르는 반면, 12S 시스템은 단 45A만을 소모하며 발열(열 손실)을 4S 대비 무려 11.1% 수준으로 억제(약 89% 열 감소) 한다는 것을 명확한 수치와 그래프로 확인하실 수 있습니다. 나아가 최근 연구되는 14S(51.8V) 시스템의 극적인 효율성까지 설계에 반영해 볼 수 있습니다.
마무리하며
드론 개발에 있어서 고전압(High-Voltage) 시스템으로의 전환은 선택이 아닌 필수 생존 전략입니다. 단순히 전압을 높여 출력을 키우는 것이 목적이 아니라, **”시스템의 전류 부하를 낮추어 발열을 잡고, 배선 무게를 줄이며, 비행 제어기와 변속기의 제어 한계를 높이는 것“**이 6S, 8S, 12S 설계의 진짜 핵심입니다.
기체를 직접 설계하고 계신 엔지니어라면, 페이로드와 목표 체공 시간을 바탕으로 이 파이썬 시뮬레이션을 응용하여 모터 KV값과 최적의 ‘시스템 전압’을 가장 먼저 확정하시기 바랍니다.
다음 **[Part 4]**에서는 이렇게 강력해진 대용량 고전압 배터리를 화재와 열 폭주(Thermal Runaway)로부터 완벽히 보호하기 위한 기술, **’극한을 견디는 배터리 열 관리 시스템(BTMS)과 액체 냉각/상변화물질(PCM) 기술’**에 대해 엔지니어링 관점에서 깊이 있게 파헤쳐 보겠습니다. 다음 편도 많은 기대 부탁드립니다!
YouTube Tutorial

Author: maponarooo, CEO of QUAD Drone Lab
Date: May 5, 2026
![[Hybrid Navigation System Series Part 5: Implementation-Stage 1] Cruising Phase: Classical Dead Reckoning, Wind Estimation, and Gazebo Wind Simulation](https://quad-drone-lab.co.kr/wp-content/uploads/2026/05/Drone-Vector-Navigation-Crab-Angle-768x429.png)
![[PX4 튜닝 시리즈 7] 착륙 감지기 설정 (Land Detector Configuration): 완벽한 비행의 마무리를 위한 필수 가이드](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Drone-Ground-Contact-Landing-Logic-768x429.png)

![[ROS2 Mastery 4편] ROS2 Topic 프로그래밍 (1) – Publisher로 거북이 제어하기](https://quad-drone-lab.co.kr/wp-content/uploads/2026/05/0510_인포그래픽-768x429.png)