
픽스호크, PX4, ROS2, Gazebo 통합 개발: 단계별 개발 가이드
픽스호크(Pixhawk)와 PX4 오토파일럿: 드론 제어 시스템의 핵심
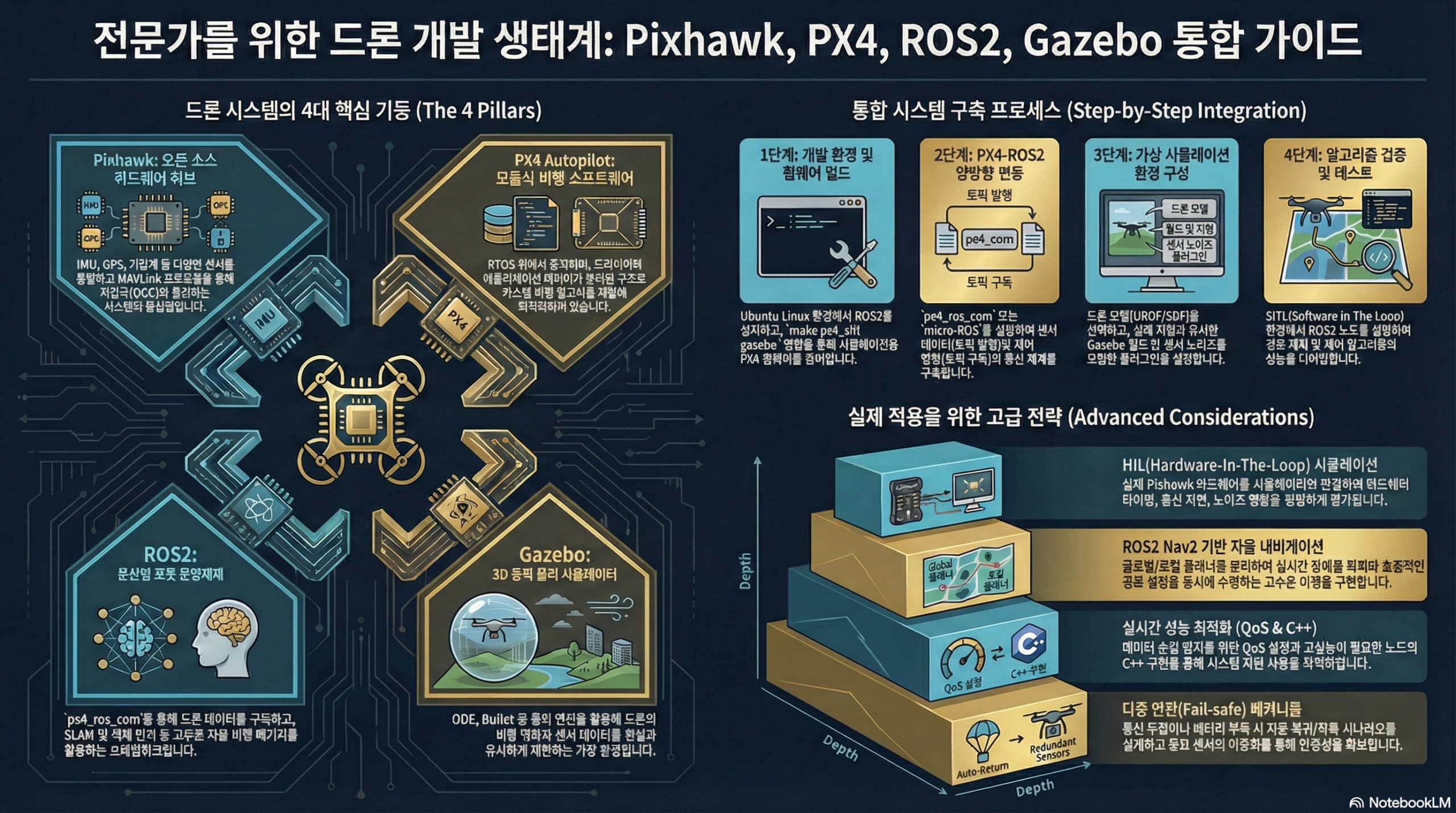
픽스호크는 오픈 소스 하드웨어 프로젝트로, 고성능 드론 및 로봇 제어에 널리 사용되는 비행 제어 보드입니다. 픽스호크 하드웨어 위에서 동작하는 PX4 오토파일럿은 강력하고 유연한 오픈 소스 비행 제어 소프트웨어로, 다양한 임무 수행 능력을 제공합니다. 전문가 수준의 드론 개발에서는 이 두 가지 요소의 깊이 있는 이해가 필수적입니다.
픽스호크 하드웨어 아키텍처
픽스호크는 다양한 센서(IMU, GPS, 기압계 등)와 액추에이터(모터, 서보 등)를 연결하고 제어하는 중심 허브 역할을 합니다. 최신 픽스호크 버전들은 더 높은 처리 능력, 더 많은 입출력 포트, 그리고 향상된 내구성을 제공하여 복잡한 알고리즘 및 추가 기능 통합을 용이하게 합니다.
-
센서 통합: 픽스호크는 자이로스코프, 가속도계, 지자기 센서, 기압계, GPS 모듈 등 다양한 센서로부터 데이터를 수집합니다. 이 데이터는 비행 상태 추정(State Estimation)의 기초가 됩니다.
-
액추에이터 제어: 수집된 센서 데이터와 비행 계획에 따라 ESC(Electronic Speed Controller)를 통해 모터를 제어하고, 서보 모터를 움직여 기체 자세를 조절합니다.
-
통신 인터페이스: MAVLink 프로토콜을 사용하여 지상국 소프트웨어(QGroundControl 등)와 통신하며, 텔레메트리 데이터 전송, 임무 계획 수신, 매개변수 설정 등을 수행합니다.
PX4 오토파일럿의 기능과 확장성
PX4 오토파일럿은 실시간 운영체제(RTOS) 위에서 동작하며, 모듈식 설계를 통해 높은 유연성과 확장성을 자랑합니다.
-
모듈식 아키텍처: PX4는 드라이버, 미들웨어, 애플리케이션 레이어로 구성됩니다. 이 구조 덕분에 특정 기능을 쉽게 수정하거나 새로운 기능을 추가할 수 있습니다.
-
비행 모드: 자동 조종, 수동 제어, 위치 유지, 임무 수행 등 다양한 비행 모드를 지원합니다.
-
커스텀 미션 프로그래밍: PX4 SDK를 활용하여 특정 임무 요구사항에 맞는 커스텀 비행 알고리즘이나 제어 로직을 개발할 수 있습니다. 이는 전문가들이 맞춤형 솔루션을 구축하는 데 핵심적인 역할을 합니다.
-
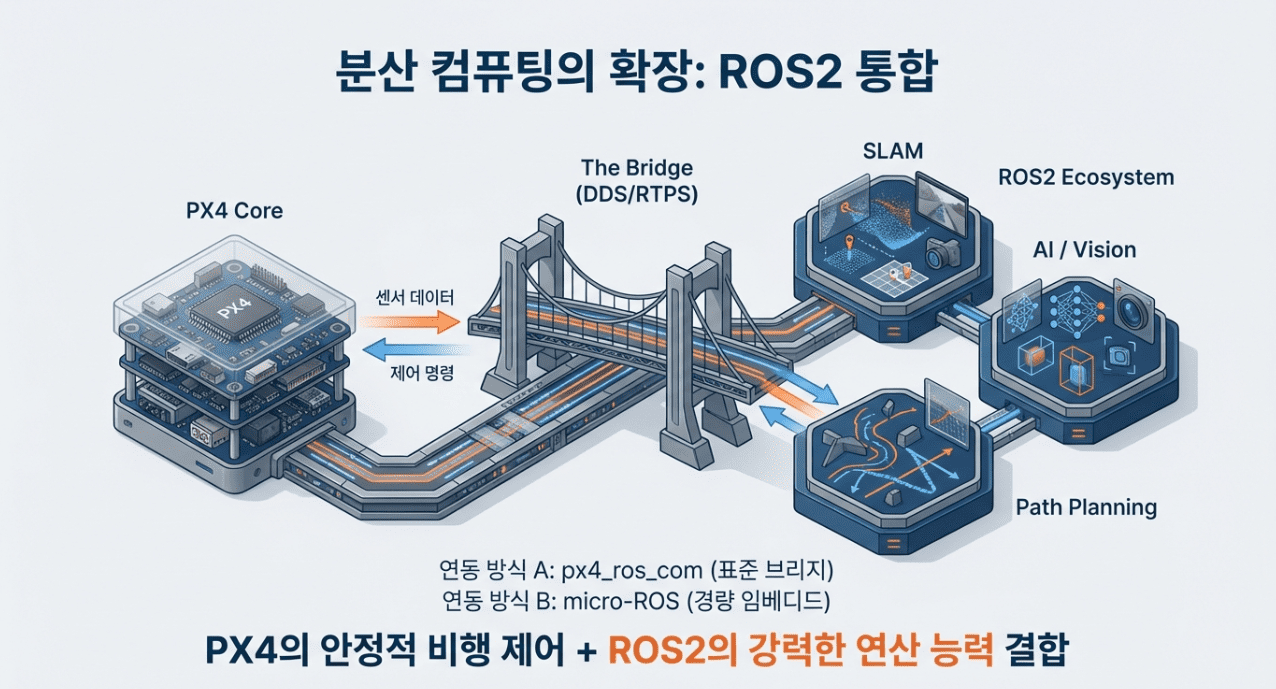
ROS/ROS2 연동: PX4는 ROS(Robot Operating System) 및 ROS2와의 연동을 공식적으로 지원합니다. 이를 통해 PX4의 강력한 비행 제어 기능을 ROS의 방대한 생태계와 결합할 수 있습니다.
ROS2와 Gazebo를 활용한 드론 시뮬레이션 환경 구축
전문가 수준의 드론 개발에서는 실제 하드웨어에 적용하기 전에 철저한 시뮬레이션이 필수적입니다. ROS2와 Gazebo는 이러한 시뮬레이션 환경 구축에 강력한 도구입니다.
ROS2(Robot Operating System 2)의 역할
ROS2는 분산 컴퓨팅 환경에서 로봇 애플리케이션 개발을 위한 프레임워크입니다. PX4와의 연동은 드론의 센서 데이터를 ROS2 토픽으로 발행하고, ROS2 노드에서 제어 명령을 받아 PX4로 전달하는 방식으로 이루어집니다.
-
ROS2와 PX4의 통합:
px4_ros_com라이브러리 또는micro-ros를 사용하여 PX4의 내부 데이터와 ROS2 토픽 간의 양방향 통신을 설정합니다. 이를 통해 픽스호크의 센서 데이터(IMU, GPS, 카메라 등)를 ROS2 환경에서 실시간으로 구독하고, ROS2에서 생성된 제어 명령(속도, 위치 등)을 PX4로 발행할 수 있습니다. -
분산 시스템: ROS2의 분산 아키텍처는 여러 컴퓨터에 걸쳐 복잡한 드론 시스템을 구축하고 관리하는 데 용이합니다. 이는 멀티 로봇 시스템이나 복잡한 임무 계획 시나리오에 특히 유용합니다.
-
ROS2 생태계 활용: SLAM(Simultaneous Localization and Mapping), 경로 계획, 객체 인식 등 다양한 ROS2 패키지를 활용하여 드론의 자율성을 향상시킬 수 있습니다.
Gazebo 시뮬레이터의 기능
Gazebo는 3D 동적 환경 시뮬레이터로, 물리적 상호작용을 사실적으로 모델링합니다. 이를 통해 드론의 비행 역학, 센서 데이터, 환경과의 상호작용을 현실감 있게 시뮬레이션할 수 있습니다.
-
PX4-Gazebo 연동:
Firmware/Tools/sitl_gazebo디렉토리의 스크립트를 사용하여 PX4 시뮬레이션(SITL: Software In The Loop) 환경을 구축합니다. 이 환경에서는 가상의 드론 모델이 Gazebo 월드 내에서 물리 법칙에 따라 움직이며, 가상의 센서 데이터를 생성합니다. -
물리 엔진: Gazebo는 ODE(Open Dynamics Engine), Bullet, DART와 같은 물리 엔진을 사용하여 충돌 감지, 중력, 마찰 등 현실적인 물리 효과를 시뮬레이션합니다.
-
센서 모델링: 카메라, LiDAR, IMU, GPS 등 다양한 센서를 현실적으로 모델링하여 시뮬레이션 환경에서 실제와 유사한 데이터를 생성합니다. 이는 센서 퓨전 알고리즘 개발 및 검증에 매우 중요합니다.
-
다양한 환경: 기본적으로 제공되는 환경 외에도 사용자 정의 지형, 건물, 장애물 등을 포함하는 복잡한 환경을 생성하여 다양한 시나리오를 테스트할 수 있습니다.
픽스호크, PX4, ROS2, Gazebo 통합 시스템 구축 가이드
이 네 가지 요소를 성공적으로 통합하기 위해서는 체계적인 접근 방식이 필요합니다.

1단계: 개발 환경 설정
-
운영체제: Ubuntu Linux (LTS 버전 권장)를 설치합니다. ROS2는 Ubuntu 환경에서 가장 안정적으로 동작합니다.
-
ROS2 설치: 공식 ROS2 설치 가이드에 따라 필요한 버전을 설치합니다.
-
PX4 펌웨어 빌드: PX4 개발 환경을 설정하고 펌웨어를 빌드합니다.
make px4_sitl gazebo명령을 통해 Gazebo 시뮬레이션 환경을 위한 펌웨어를 빌드할 수 있습니다. -
Gazebo 설치: ROS2 설치 시 함께 설치되거나, 별도로 설치합니다.
2단계: PX4와 ROS2 연동 설정
-
px4_ros_com활용: PX4 펌웨어 내부에 포함된px4_ros_com라이브러리를 사용하여 PX4의 내부 데이터(센서, 상태 정보 등)를 ROS2 토픽으로 발행하고, ROS2에서 생성된 제어 명령(예:geometry_msgs/Twist)을 PX4의 제어 입력으로 사용하도록 설정합니다. -
micro-ROS활용 (선택 사항): 임베디드 환경이나 더 경량화된 시스템에서는micro-ROS를 사용하여 PX4와 ROS2를 연동할 수 있습니다. 이 경우 PX4는 RTOS 환경에서micro-ROS에이전트 역할을 수행하고, ROS2 통신은 DDS(Data Distribution Service)를 통해 이루어집니다. -
Launch 파일 작성: ROS2의
launch시스템을 활용하여 PX4 SITL, Gazebo 시뮬레이터, 필요한 ROS2 노드(예: 센서 드라이버, 경로 계획 알고리즘)를 한 번에 실행할 수 있는launch파일을 작성합니다.
3단계: Gazebo 시뮬레이션 환경 구성
-
드론 모델 선택: PX4 SITL과 함께 제공되는 기본 드론 모델(예: Iris, Jazz)을 사용하거나, 커스텀 URDF(Unified Robot Description Format) 또는 SDF(Simulation Description Format) 파일을 사용하여 원하는 드론 모델을 생성합니다.
-
월드 생성:
gazebo_ros_pkgs를 활용하여 커스텀 Gazebo 월드를 생성합니다. 이는 실제 드론이 운용될 환경과 유사하게 구성하여 테스트의 현실감을 높입니다. -
센서 설정: Gazebo 플러그인을 통해 IMU, GPS, 카메라, LiDAR 등 필요한 센서를 모델링하고, 센서 노이즈나 오차를 현실적으로 설정합니다.
4단계: 시뮬레이션 실행 및 테스트
-
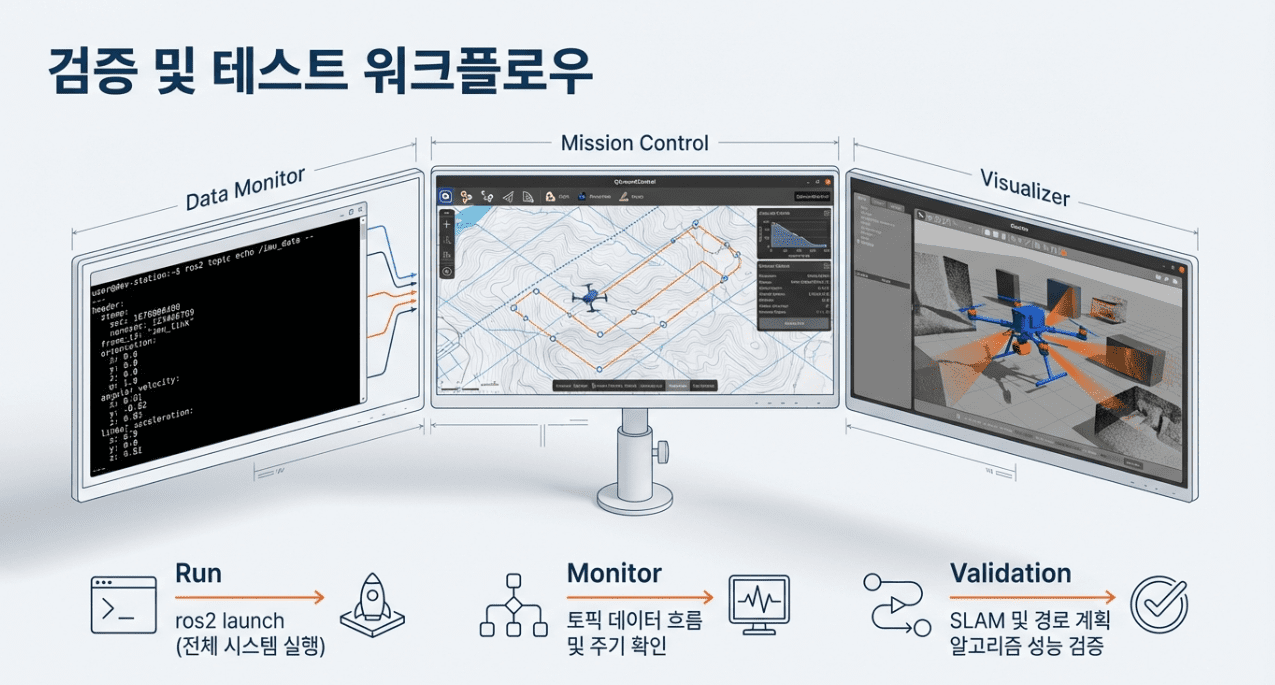
SITL 실행: 작성된 ROS2
launch파일을 실행하여 PX4 SITL, Gazebo, ROS2 노드들이 함께 실행되도록 합니다. -
데이터 확인:
ros2 topic echo명령어를 사용하여 PX4에서 발행되는 센서 데이터 토픽을 확인하고, ROS2 노드에서 생성되는 제어 명령 토픽을 확인합니다. -
비행 테스트: QGroundControl과 같은 지상국 소프트웨어를 사용하여 자동 임무를 계획하거나, ROS2 노드를 통해 직접 제어 명령을 발행하여 시뮬레이션된 드론의 비행 성능을 테스트합니다.
-
알고리즘 검증: 개발한 SLAM, 경로 계획, 제어 알고리즘 등을 시뮬레이션 환경에서 실행하며 성능을 검증하고 디버깅합니다.
실제 적용 시 고려사항 및 고급 주제
시뮬레이션 환경에서의 성공적인 테스트는 실제 하드웨어 적용의 기반이 되지만, 실제 환경은 시뮬레이션과 다른 여러 변수를 포함합니다.
1. 하드웨어-인-더-루프(HIL) 시뮬레이션
SITL(Software In The Loop) 시뮬레이션은 소프트웨어적인 검증에 유용하지만, 실제 하드웨어의 반응성을 평가하기에는 한계가 있습니다. HIL 시뮬레이션은 실제 픽스호크 하드웨어를 사용하되, 센서 입력은 시뮬레이터에서 생성하고, 액추에이터 출력은 가상의 환경으로 보내는 방식입니다. 이를 통해 실제 하드웨어의 타이밍, 노이즈, 통신 지연 등의 영향을 더 정확하게 파악할 수 있습니다.
2. 센서 퓨전 및 상태 추정
픽스호크의 PX4는 IMU, GPS, 기압계, 비전 센서 등 다양한 센서 데이터를 융합하여 기체의 정확한 위치, 속도, 자세를 추정하는 데 탁월한 능력을 보입니다. ROS2 환경에서는 robot_localization 패키지 등을 활용하여 IMU, GPS, Odometry 등 다양한 소스로부터 데이터를 받아 칼만 필터(Kalman Filter) 기반의 상태 추정기를 구축할 수 있습니다. 시뮬레이션 환경에서 다양한 센서 조합과 노이즈 수준으로 테스트하여 최적의 상태 추정 성능을 확보하는 것이 중요합니다.
3. 경로 계획 및 내비게이션
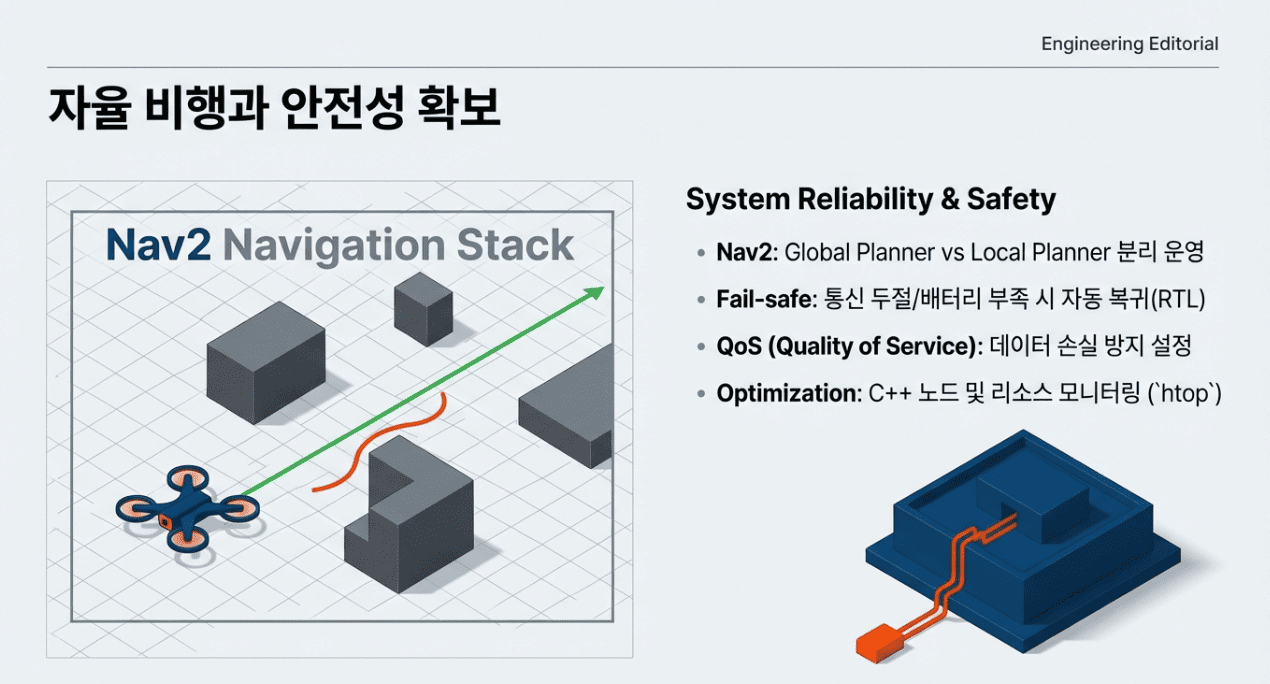
ROS2는 Nav2와 같은 강력한 내비게이션 스택을 제공합니다. 이를 PX4와 통합하면, SLAM으로 생성된 맵 정보를 기반으로 복잡한 환경에서도 안전하고 효율적인 경로를 계획하고 자율적으로 비행하는 드론을 구현할 수 있습니다.
-
로컬 플래너 vs. 글로벌 플래너:
Nav2는 전역 경로 계획(Global Planner)과 지역 경로 계획(Local Planner)을 분리하여, 전체적인 임무 수행 경로와 장애물을 회피하는 실시간 경로를 동시에 생성합니다. -
PX4와의 인터페이스: ROS2의
geometry_msgs/PoseStamped나nav_msgs/Path와 같은 메시지를 사용하여 PX4의 내비게이션 목표를 설정하고, PX4는 이를 기반으로 고수준의 제어 명령을 생성하여 드론을 제어합니다.
4. 실시간 성능 및 최적화
ROS2는 DDS를 기반으로 하여 실시간 성능을 향상시켰지만, 여전히 복잡한 알고리즘이나 높은 데이터 처리율이 요구되는 애플리케이션에서는 최적화가 필요합니다.
-
CPU/메모리 사용량 모니터링:
htop,ros2 topic hz등의 도구를 사용하여 시스템 리소스 사용량을 주기적으로 확인합니다. -
알고리즘 최적화: Python 대신 C++를 사용하여 고성능이 필요한 노드를 구현하고, 불필요한 데이터 복사나 연산을 최소화합니다.
-
ROS2 QoS(Quality of Service) 설정: 통신 지연, 데이터 손실 등에 대한 QoS 설정을 통해 시스템의 안정성을 높입니다.
5. 안전 및 비상 절차
자율 비행 시스템의 개발에서 안전은 최우선 과제입니다.
-
Fail-safe 메커니즘: 통신 두절, 센서 이상, 배터리 부족 등 비상 상황 발생 시 드론이 자동으로 복귀하거나 안전하게 착륙하도록 Fail-safe 시나리오를 설계하고 테스트해야 합니다. PX4는 다양한 Fail-safe 옵션을 제공합니다.
-
임무 모니터링: 지상국 소프트웨어나 ROS2 기반의 모니터링 시스템을 구축하여 실시간으로 드론의 상태와 임무 진행 상황을 감시합니다.
-
이중화(Redundancy): 중요한 시스템(예: IMU, GPS, 통신 모듈)에 대한 이중화를 고려하여 단일 실패 지점(Single Point of Failure)을 제거합니다.
결론
픽스호크, PX4, ROS2, Gazebo의 통합은 전문가들이 차세대 드론 시스템을 개발하는 데 있어 강력한 기반을 제공합니다. 이 가이드에서는 시스템 구성, 시뮬레이션 환경 구축, 그리고 실제 적용 시 고려해야 할 고급 주제들을 다루었습니다.
-
체계적인 개발 환경 구축: Ubuntu, ROS2, PX4 펌웨어, Gazebo를 단계별로 설치하고 설정합니다.
-
ROS2와 PX4의 원활한 연동:
px4_ros_com또는micro-ROS를 활용하여 데이터 교환 및 제어 명령 전달을 구현합니다. -
현실적인 Gazebo 시뮬레이션: 커스텀 드론 모델과 환경을 사용하여 정확하고 신뢰할 수 있는 시뮬레이션 결과를 얻습니다.
-
실제 적용 대비: HIL 시뮬레이션, 센서 퓨전, 경로 계획, 실시간 성능 최적화, 안전 메커니즘 구축 등 실제 환경에서의 성공적인 운용을 위한 핵심 요소들을 숙지합니다.
이러한 통합 시스템을 통해 개발자는 복잡한 드론 애플리케이션을 효율적으로 설계, 개발, 테스트하고, 궁극적으로는 혁신적인 드론 기술을 현실 세계에 구현할 수 있습니다.
EXTERNAL_LINKS: 쿼드(QUAD)드론연구소 공식 문서, PX4 공식 문서, ROS2 공식 문서, Gazebo 공식 문서

작성자 : 마포나루, 쿼드(QUAD) 드론연구소 대표
기고일 : 2026-02-02
![PX4 MAVSDK – C++ Programming [Episode 10] Custom Logging and Integration Testing (gtest)](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0320_인포그래피-768x419.jpg)
