PX4 MAVLink-Python Programming: 2. Using Python MAVLink Libraries
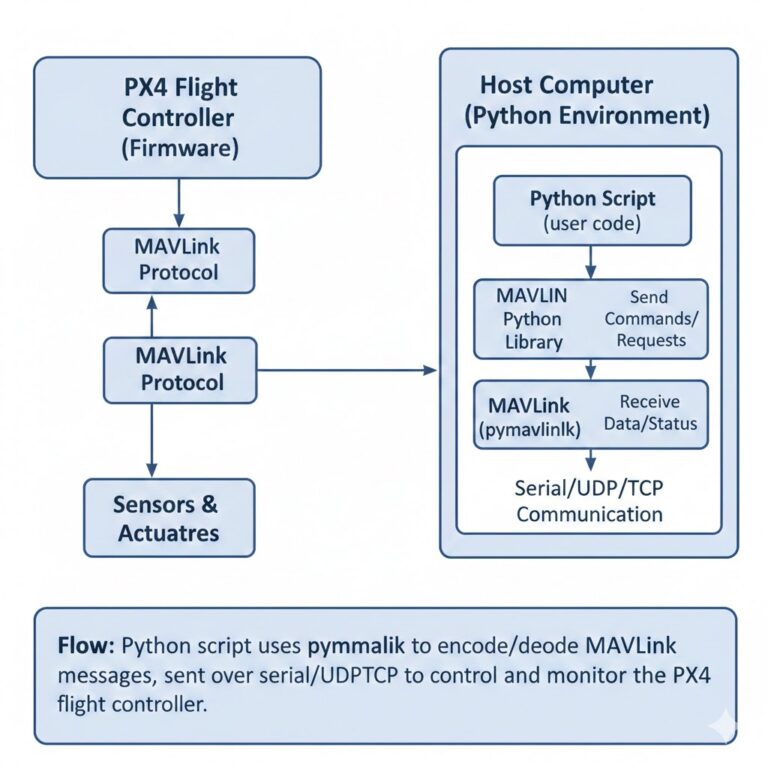
Hello, this is Aiden from the Marketing Team. Today, I would like to introduce PX4 MAVLink-Python Programming, specifically focusing on the use of Python MAVLink libraries. Please note that this content is copyrighted by QUAD Drone Lab, and we kindly ask that you refrain from unauthorized distribution. Using Python MAVLink Library Overview The pymavlink package…