2-Axis Servo Gimbal Design and Wiring : 911 FALCON Project
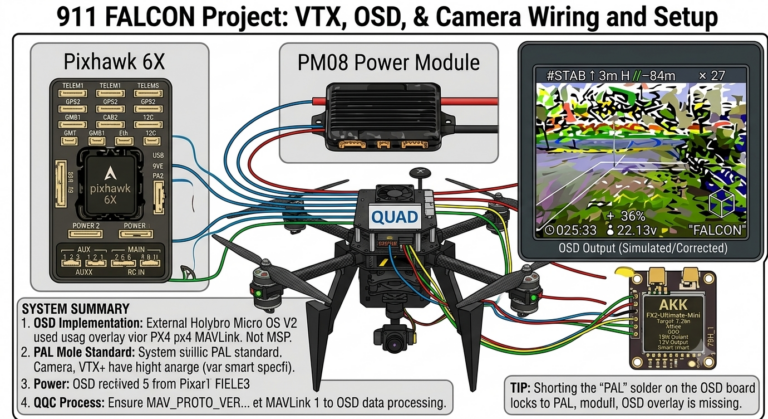
Hello, this is QUAD Drone Laboratory.I’m Geunchan Lee, Senior Researcher at QUAD Drone Lab. In the previous article, we covered the video transmitter, OSD, and camera wiring and setup process for the 911 FALCON drone. Due to PX4 firmware’s lack of native analog OSD support, the Holybro Micro OSD V2 module was used to receive…