
PX4 MAVLink-Python Programming: 5. Ensuring MAVLink Reliability
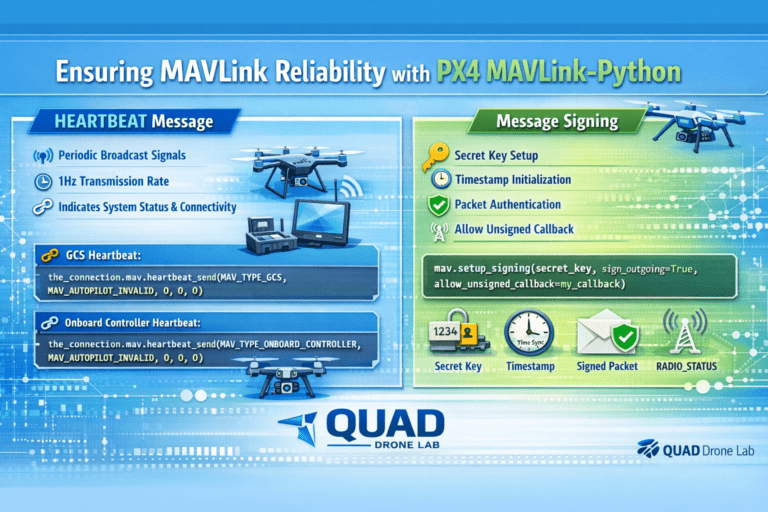
Hello. This is Aiden from the Marketing Team. Today, I would like to introduce PX4 MAVLink-Python Programming, specifically focusing on Ensuring MAVLink Reliability. Please note that this content is registered under the copyright of our QUAD Drone Research Institute, and we kindly ask you to refrain from unauthorized distribution. HEARTBEAT All MAVLink components must periodically…
![[PX4 Tuning Series 2] Catching Hidden Vibrations and Filter Tuning: Finding the Perfect Compromise Between Control Latency and Noise](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Low-Pass-Versus-Notch-Filters-768x429.png)
![[PX4 Tuning Series 1] The First Step: Perfect Hardware Preparation and Understanding Control Latency](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Flight-Controller-Latency-Pipeline-Diagram-768x429.png)
![[Series Announcement] The Ultimate Guide to PX4 Tuning for Drone Researchers and Students](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/PX4-Multicopter-Optimization-and-Tuning-Guide-768x429.png)
![[연재 안내] 드론 연구자와 학생을 위한 완벽 가이드: PX4 튜닝의 모든 것](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/PX4-멀티콥터-비행-최적화-로드맵-768x429.png)