
MAVLink 프로토콜이란 무엇인가?
MAVLink는 드론 시스템에서 널리 사용되는 경량 메시징 프로토콜입니다. Pixhawk 및 PX4와 같은 자동 항법 장치와의 통신에 핵심적인 역할을 수행합니다. 본문에서는 MAVLink의 구조, 메시지 형식, 데이터 전송 방식 등을 전문가 수준으로 분석하고, 실제 Pixhawk 및 PX4 환경에서의 적용 사례를 통해 이해를 돕습니다.
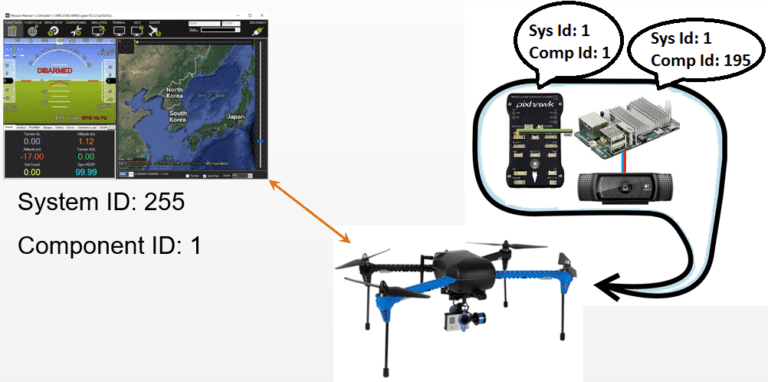
MAVLink는 드론 시스템에서 널리 사용되는 경량 메시징 프로토콜입니다. Pixhawk 및 PX4와 같은 자동 항법 장치와의 통신에 핵심적인 역할을 수행합니다. 본문에서는 MAVLink의 구조, 메시지 형식, 데이터 전송 방식 등을 전문가 수준으로 분석하고, 실제 Pixhawk 및 PX4 환경에서의 적용 사례를 통해 이해를 돕습니다.
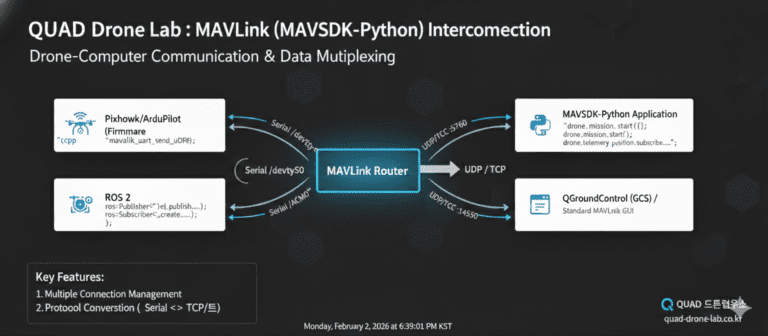
MAVLink Router는 여러 엔드포인트(연결) 간에 MAVLink 메시지를 분배하는 애플리케이션입니다 . 대상 주소에 따라 패킷을 단일 포트 또는 여러 엔드포인트에 분배합니다. 연결은 UART, UDP 또는 TCP를 통해 이루어질 수 있습니다 1. 컴파일 및 설치 컴파일하려면 다음 패키지가 필요합니다. 종속성 가져오기 MAVLink Router는 현재 mavlink C 라이브러리에 의존하고 있습니다. 해당 하위 모듈을 가져와야 합니다. 빌드 종속성으로 몇…
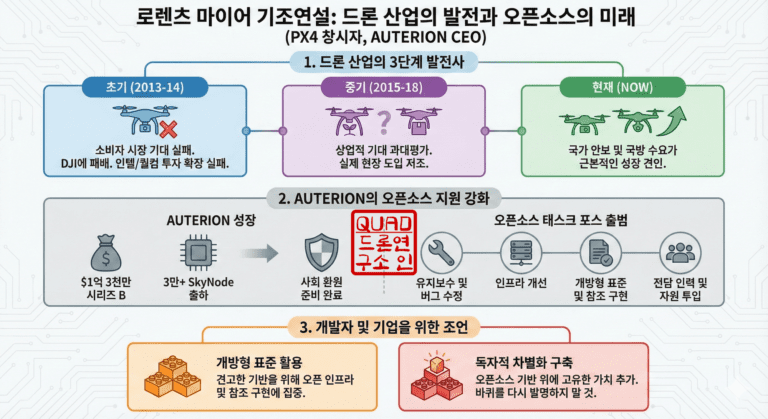
크리스마스가 멀지 않아 그런지 날씨가 많이 추워졌습니다. 지난주에 저는 감기에 걸려서 고생을 좀 했는데요, 구독자님들은 감기 걸리지 않도록 건강 관리 유의 하시기 바랍니다. 이번 포스팅은 지난주에 저희 YouTube 채널 “픽스호크 주간 기술동향“에서 소개해 드렸던 지난 11월 10-11일에 미국 Atlanta에서 있었던 ‘2025 PX4 Developer Summit’ 내용을 전체적으로 살펴보고 시사점에 대해 애기를 해 볼까 합니다.YouTube에 재생목록이 있으니…

📣 쿼드(QUAD) 드론연구소 홈페이지 OPEN !!✨✨✨ 쿼드(QUAD) 드론연구소의 홈페이지가 오픈 되었습니다. 1. PX4 기술·커뮤니티 동향 1-1. 11월 26일 PX4 Dev Call 핵심 정리 PX4 공식 Dev Call(2025-11-26)에서 공유된 내용들:discuss.px4.io 실무 관점 요약 1-2. PX4 Developer Summit 2025 (애틀랜타) PX4 Developer Summit 2025가 11월 10–11일, 미국 조지아주 애틀랜타에서 개최되었다.LF Events+1 한국 개발자/교육자 관점 2. ArduPilot 기술…