MAVLink Protocol Explained for Pixhawk & PX4 Developers
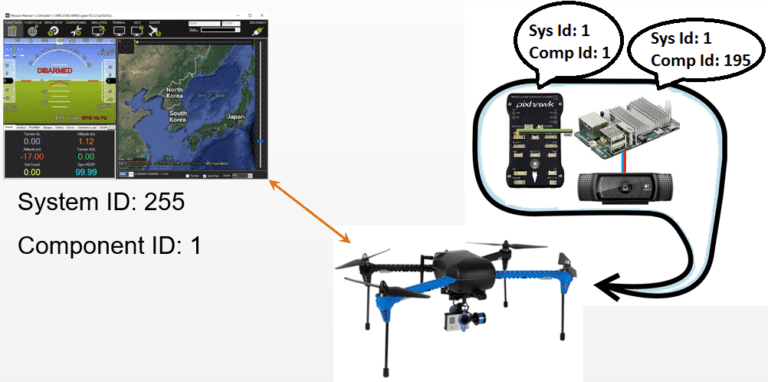
MAVLink (Micro Air Vehicle Link) is an open-source, lightweight messaging protocol designed for efficient data communication between drones, robots, and other automated systems. It has established itself as the de facto standard for communication between Autopilots (such as Pixhawk) and Ground Control Stations (GCS).

![[Seminar Review] AI-Powered Pixhawk (PX4) Autonomous Flight Training at Goheung Drone Center](https://quad-drone-lab.co.kr/wp-content/uploads/2026/02/Snapshot_4-768x432.png)