
[드론 배터리의 모든 것] Part 1: 드론 배터리의 기초와 화학적 특성: LiPo vs Li-Ion
안녕하세요! 드론과 차세대 모빌리티(UAM, eVTOL 등) 연구에 매진하고 계신 대학원생 및 연구원 여러분. 오늘은 드론 설계와 운용에 있어 가장 핵심적인 요소이자 가장 까다로운 부품인 **’배터리(Battery)’**에 대해 깊이 파헤쳐보는 연재의 첫 번째 시간을 준비했습니다.
드론의 임무 반경이 취미용을 넘어 물류, 측량, 농업, 군사, 그리고 항공 모빌리티까지 확장되면서, ‘에너지 밀도’와 ‘방전율’은 임무 성공을 좌우하는 가장 중요한 병목(Bottleneck)이 되었습니다. 오늘 다룰 주제는 드론 배터리의 뼈대를 이루는 직렬(S)과 병렬(P) 구조의 이해, 그리고 현대 드론의 양대 산맥인 LiPo(리튬 폴리머)와 Li-Ion(리튬 이온) 배터리의 화학적, 물리적 특성입니다.
이론적인 배경부터 파이썬(Python)을 활용한 배터리 팩 모델링 예제까지 차근차근, 그리고 친절하게 설명해 드릴 테니 끝까지 함께해 주시기 바랍니다!
1. 드론 배터리의 뼈대 설계: 직렬(S)과 병렬(P)의 원리
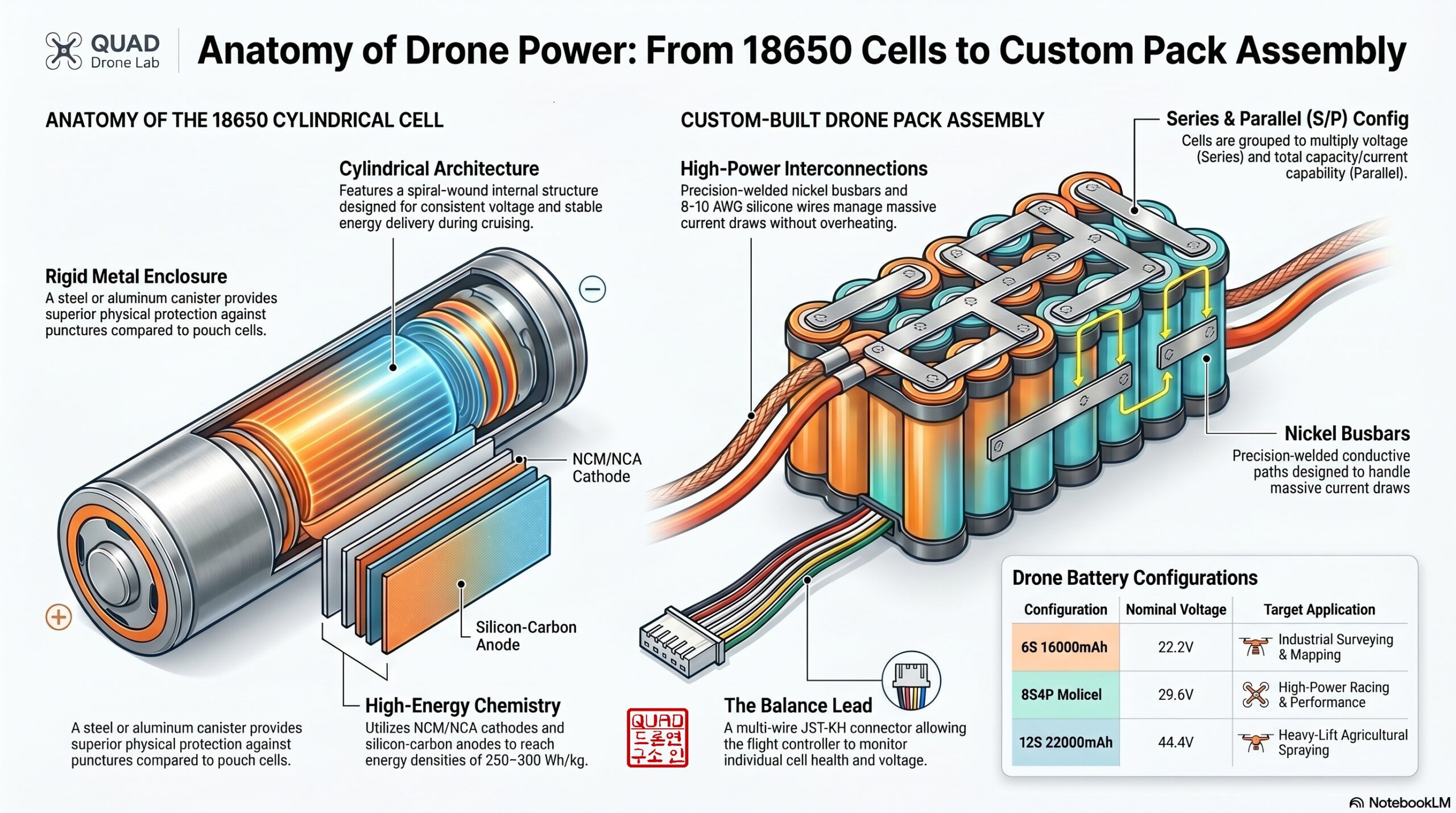
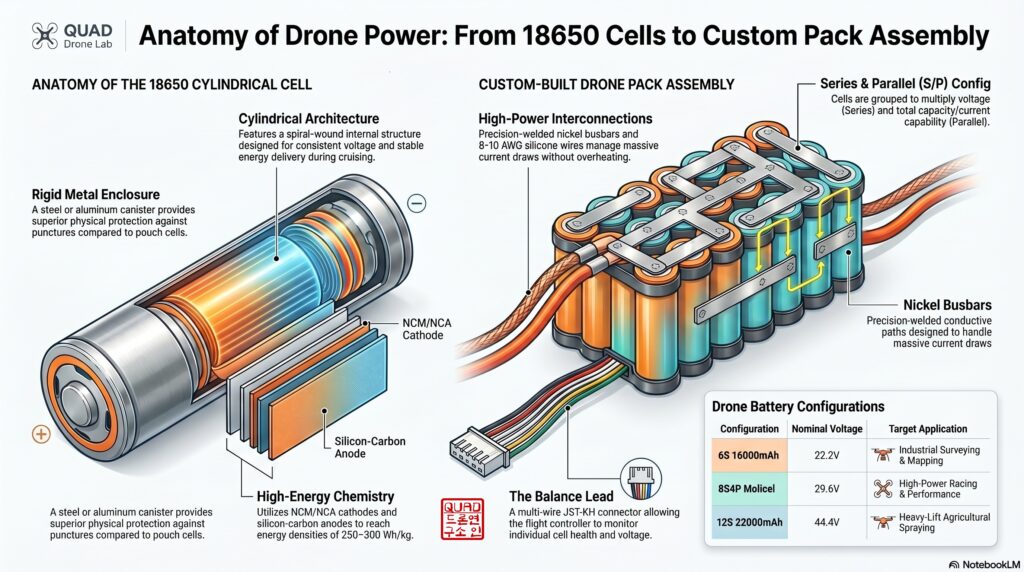
드론 배터리 스펙을 보면 ‘6S 16000mAh’, ‘8S4P’와 같은 암호 같은 숫자들을 흔히 접하게 됩니다. 여기서 ‘S’는 직렬(Series) 연결된 셀의 수를, ‘P’는 병렬(Parallel) 연결된 셀의 수를 의미합니다.
- 직렬(S) – 전압(Voltage)의 결정: 리튬 기반 배터리 셀 1개의 공칭 전압(Nominal Voltage)은 화학적 특성에 따라 약 3.7V입니다. 직렬로 셀을 연결하면 전압이 배수로 증가합니다. 예를 들어, 6S 배터리는 6개의 셀이 직렬로 연결되어 22.2V(3.7V × 6)의 공칭 전압을 가지며, 완전히 충전되었을 때는 25.2V(4.2V × 6)에 도달하게 됩니다. 전압은 모터의 회전수(RPM)와 직결되며, 동일한 전력을 낼 때 전압이 높을수록 전류를 낮출 수 있어 발열과 전선 무게를 줄이는 데 매우 유리합니다.
- 병렬(P) – 용량(Capacity) 및 전류(Current)의 결정: 셀을 병렬로 연결하면 전압은 그대로 유지되지만 배터리의 용량(mAh 또는 Ah)이 배수로 증가합니다. 예를 들어 8S4P 구성은 8개의 직렬 그룹을 4개 병렬로 묶어 총 32개의 셀로 이루어진 팩을 의미합니다.
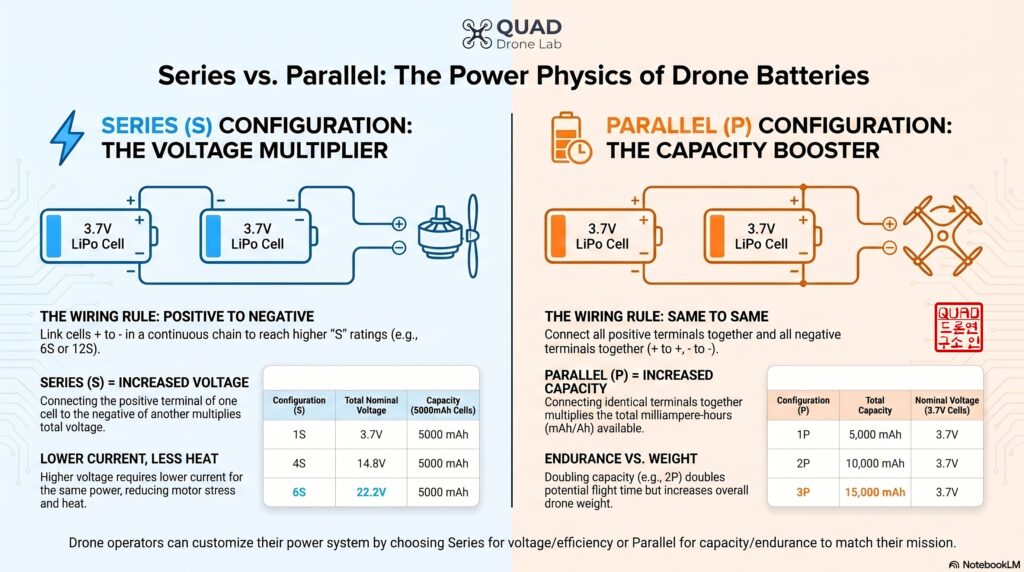
연구를 진행하시다 보면 기체의 무게 제한(Payload)과 요구되는 추진력(Thrust) 사이에서 타협점을 찾아야 합니다. 전압을 높여 효율을 챙길 것인가, 용량을 늘려 체공 시간을 늘릴 것인가에 대한 고민은 셀을 어떻게 S와 P로 조합하느냐에서 출발합니다.
2. 폭발적인 펀치력의 상징: LiPo (리튬 폴리머) 배터리
현재 FPV(First Person View) 레이싱 드론이나 무거운 짐을 드는 농업용 드론에서 가장 널리 쓰이는 배터리는 단연 **LiPo(리튬 폴리머)**입니다.
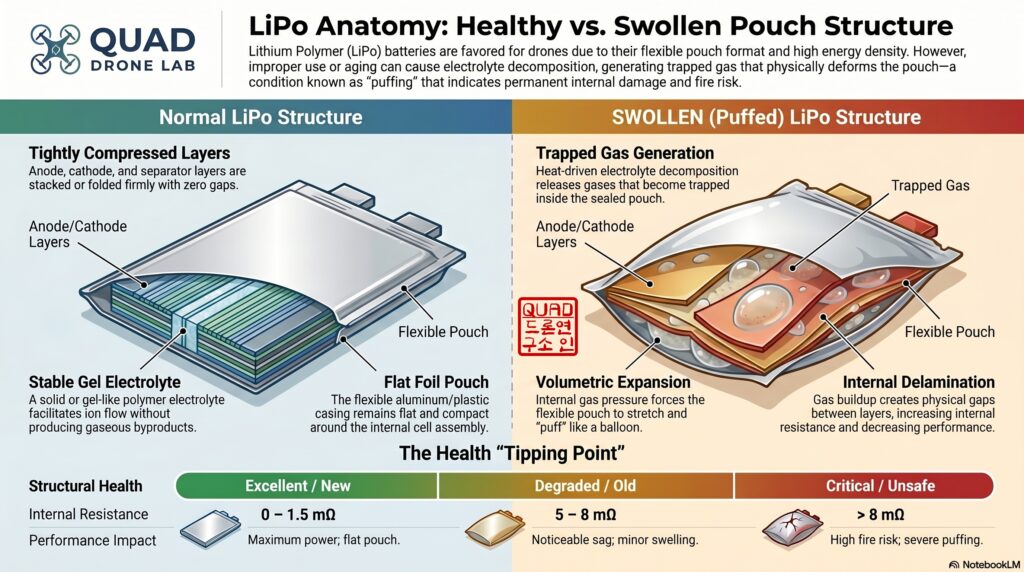
[화학적 및 물리적 특성] 리튬 폴리머 배터리는 액체 전해질 대신 고체 또는 겔(Gel) 형태의 폴리머 전해질을 사용하는 것이 가장 큰 화학적 차이점입니다. 이러한 특성 덕분에 단단한 금속 케이스 대신 가볍고 유연한 ‘파우치(Pouch)’ 형태로 배터리를 포장할 수 있어, 형태의 제약이 적고 무게를 크게 줄일 수 있습니다.
[장점: 압도적인 방전율(C-Rating)] LiPo 배터리의 최대 장점은 **에너지를 폭발적으로 방출하는 능력, 즉 방전율(C-Rating)**이 매우 높다는 것입니다. 이륙이나 급격한 곡예비행 시 모터는 엄청난 전류의 스파이크를 요구하는데, LiPo 배터리는 순간적으로 50C~100C 이상의 전류를 쏟아낼 수 있습니다. 이는 내부 저항(Internal Resistance)이 낮아 전압 강하(Voltage Sag) 현상을 최소화하면서 모터에 일정한 출력을 공급하기 때문입니다.
[단점 및 안전성 이슈] 그러나 약점도 뚜렷합니다. LiPo 배터리의 부드러운 파우치는 물리적 충격에 취약하며, 극심한 부하나 열에 노출될 경우 전해질이 분해되면서 가스가 발생해 배터리가 부풀어 오르는 ‘스웰링(Swelling/Puffing)’ 현상이 일어납니다. 연구원분들이 실험실에서 각별히 주의하셔야 할 부분은 **열 폭주(Thermal Runaway)**입니다. 배터리 온도가 90°C에 이르면 고체 전해질 계면(SEI)이 발열 반응과 함께 분해되고, 140°C를 넘어가면 분리막(Separator)이 녹으면서 내부 단락(Short circuit)이 발생해 500°C 이상의 화재 및 폭발로 이어질 수 있습니다. 또한, 사이클 수명도 300~500회 정도로 비교적 짧은 편입니다.
3. 압도적인 체공 시간의 비밀: Li-Ion (리튬 이온) 배터리
최근 군사용 정찰 드론, 장거리 매핑(Mapping), 물류 배송 드론 분야에서는 LiPo 대신 Li-Ion(리튬 이온) 배터리를 적극적으로 채택하고 있습니다.
[화학적 및 물리적 특성] 리튬 이온 배터리는 주로 NMC(니켈·망간·코발트)나 NCA(니켈·코발트·알루미늄) 양극재와 액체 전해질을 사용하며, 우리에게 익숙한 18650이나 21700과 같은 원통형 금속 캔(Cylindrical Metal Canister) 구조로 제작됩니다. 금속 케이스에 둘러싸여 있기 때문에 물리적 충격에 훨씬 강하고 내부 압력을 잘 견뎌냅니다.
[장점: 최고의 에너지 밀도와 긴 수명] 리튬 이온의 핵심 경쟁력은 바로 **’에너지 밀도(Energy Density)’**에 있습니다. 일반적인 LiPo 배터리가 100~200Wh/kg의 밀도를 가지는 반면, 리튬 이온은 150~450Wh/kg에 이르는 압도적인 에너지 밀도를 자랑합니다. 금속 케이스로 인해 물리적 무게가 추가되더라도 셀 자체의 밀도가 워낙 높아, 결과적으로 동일한 무게 대비 20~30% 더 긴 체공 시간을 확보할 수 있습니다. 또한, 500~1000회의 충·방전 사이클을 버틸 수 있어 장기적인 운영 비용(TCO) 측면에서도 45%가량 경제적입니다.
[단점: 둔한 반응성과 열 관리의 어려움] 치명적인 단점은 LiPo 대비 내부 저항(IR)이 높아 급격한 전류 소모 시 전압이 뚝 떨어지는 전압 강하(Voltage Sag) 현상이 심하다는 것입니다. 이 때문에 곡예비행이나 무거운 페이로드를 자주 바꿔 달아야 하는 환경에는 부적합합니다. 또한 지속적인 부하가 걸릴 경우 열이 금속 캔 내부에 축적될 수 있어, 겨울철 영하의 온도에서는 용량이 급감하는 현상을 막기 위해 추가적인 보온 시스템이 필요하기도 합니다.
4. 핵심 비교 및 요약: 나의 연구 목적에 맞는 배터리는?
두 화학 전지의 특성을 간략히 표로 정리해 드립니다. 실험 설계 시 기체의 목적에 따라 적절한 팩을 선택하시길 바랍니다.
| 구분 | LiPo (리튬 폴리머) | Li-Ion (리튬 이온) |
|---|---|---|
| 형태 | 파우치 (유연함) | 원통형 금속 캔 (단단함) |
| 에너지 밀도 | 보통 (100 ~ 200 Wh/kg) | 매우 높음 (150 ~ 450 Wh/kg) |
| 방전율(C-Rating) | 매우 높음 (순간 100C 이상 가능) | 보통 (지속적인 정속 주행에 유리) |
| 수명 (사이클) | 300 ~ 500회 | 500 ~ 1,000회 |
| 권장 용도 | FPV 레이싱, 시네마틱 촬영, 초중량물 운송 | 장거리 매핑, 국경 정찰, 물류 배송 |
💡 연구원 Tip: 배터리 팩을 구성하실 때, 측정되는 내부 저항이 **DC-IR(직류 내부 저항)**인지 스마트 충전기에서 1kHz 주파수로 측정하는 **AC-IR(교류 내부 저항/임피던스)**인지 명확히 구분하여 데이터를 수집하셔야 합니다.
5. Python으로 해보는 배터리 스펙 및 체공 시간 시뮬레이션
대학원생 여러분들이 배터리 셀 스펙 시트(Datasheet)만 가지고, 직/병렬 조합을 변경했을 때 전체 드론의 에너지 용량과 예상 비행시간을 시뮬레이션할 수 있는 Python 예제 코드를 작성해 보았습니다. 이 코드를 기반으로 모델을 확장하여 논문이나 연구 설계에 활용해 보시기 바랍니다.
class DroneBattery:
def __init__(self, cell_type, cell_voltage, cell_capacity_ah, cell_weight_kg, series, parallel):
"""
드론 배터리 팩의 기초 계산을 위한 클래스입니다.
:param cell_type: 배터리 종류 ('LiPo' 또는 'Li-Ion')
:param cell_voltage: 셀 1개의 공칭 전압 (V)
:param cell_capacity_ah: 셀 1개의 용량 (Ah)
:param cell_weight_kg: 셀 1개의 무게 (kg)
:param series: 직렬 연결 수 (S)
:param parallel: 병렬 연결 수 (P)
"""
self.cell_type = cell_type
self.cell_voltage = cell_voltage
self.cell_capacity_ah = cell_capacity_ah
self.cell_weight_kg = cell_weight_kg
self.series = series
self.parallel = parallel
def get_pack_specs(self):
"""배터리 팩의 총 전압, 용량, 에너지(Wh), 무게를 계산합니다."""
total_voltage = self.cell_voltage * self.series
total_capacity = self.cell_capacity_ah * self.parallel
total_energy_wh = total_voltage * total_capacity
# 부스바, 케이블, 패키징 무게로 셀 총 무게의 약 15%를 추가로 가정합니다.
total_weight_kg = (self.cell_weight_kg * self.series * self.parallel) * 1.15
energy_density = total_energy_wh / total_weight_kg
return {
"Total Voltage (V)": round(total_voltage, 2),
"Total Capacity (Ah)": round(total_capacity, 2),
"Total Energy (Wh)": round(total_energy_wh, 2),
"Total Weight (kg)": round(total_weight_kg, 2),
"Energy Density (Wh/kg)": round(energy_density, 2)
}
def estimate_flight_time(self, avg_power_consumption_w):
"""
평균 전력 소모량을 기반으로 체공 시간을 추정합니다.
안전한 비행을 위해 배터리의 80%만 사용한다고 가정(DoD 80%)합니다.
:param avg_power_consumption_w: 드론의 평균 소모 전력 (W)
"""
pack_specs = self.get_pack_specs()
usable_energy_wh = pack_specs["Total Energy (Wh)"] * 0.8
flight_time_hours = usable_energy_wh / avg_power_consumption_w
flight_time_mins = flight_time_hours * 60
return round(flight_time_mins, 2)
# --- 시뮬레이션 실행 ---
# 1. 고출력 레이싱 드론용 6S1P LiPo 팩 (셀당 3.7V, 1.5Ah, 0.04kg)
lipo_pack = DroneBattery(cell_type="LiPo", cell_voltage=3.7, cell_capacity_ah=1.5,
cell_weight_kg=0.04, series=6, parallel=1)
# 2. 장거리 정찰용 6S3P Li-Ion 팩 (18650 기반, 셀당 3.6V, 3.5Ah, 0.048kg)
liion_pack = DroneBattery(cell_type="Li-Ion", cell_voltage=3.6, cell_capacity_ah=3.5,
cell_weight_kg=0.048, series=6, parallel=3)
# 기체 평균 소모 전력을 250W로 가정하여 출력
print(f"=== {lipo_pack.cell_type} 배터리 팩 스펙 (6S1P) ===")
print(lipo_pack.get_pack_specs())
print(f"예상 체공 시간 (250W 소모 시): {lipo_pack.estimate_flight_time(250)} 분\n")
print(f"=== {liion_pack.cell_type} 배터리 팩 스펙 (6S3P) ===")
print(liion_pack.get_pack_specs())
print(f"예상 체공 시간 (250W 소모 시): {liion_pack.estimate_flight_time(250)} 분")
위 코드를 실행해 보시면 LiPo의 낮은 무게와 Li-Ion의 막대한 에너지 용량 및 체공 시간 차이를 숫자로 직접 확인하실 수 있습니다.
=== LiPo 배터리 팩 스펙 (6S1P) ===
{'Total Voltage (V)': 22.2, 'Total Capacity (Ah)': 1.5, 'Total Energy (Wh)': 33.3, 'Total Weight (kg)': 0.28, 'Energy Density (Wh/kg)': 120.65}
예상 체공 시간 (250W 소모 시): 6.39 분
=== Li-Ion 배터리 팩 스펙 (6S3P) ===
{'Total Voltage (V)': 21.6, 'Total Capacity (Ah)': 10.5, 'Total Energy (Wh)': 226.8, 'Total Weight (kg)': 0.99, 'Energy Density (Wh/kg)': 228.26}
예상 체공 시간 (250W 소모 시): 43.55 분연구하시는 기체의 하드웨어 스펙에 맞춰 avg_power_consumption_w 등의 변수를 수정해 보시면 훌륭한 초기 설계 자료가 될 것입니다.
마무리하며
드론의 퍼포먼스는 궁극적으로 화학과 전자공학의 예술적인 타협에서 나옵니다. 오늘 설명해 드린 LiPo의 방전 성능과 Li-Ion의 에너지 밀도라는 상반된 화학적 특성을 융합하기 위해, 현재 업계에서는 두 가지의 장점만을 결합한 반고체(Semi-Solid State) 배터리 및 전고체 배터리 연구로 넘어가고 있습니다.
다음 **[Part 2]**에서는 이러한 차세대 혁신 기술인 전고체 배터리의 상용화 현황과 열 관리 시스템(BMS)에 대해 심도 있게 다뤄보도록 하겠습니다. 연구실에서의 실험이 성공적인 비행으로 이어지기를 응원합니다!
YouTube Tutorial

Author: maponarooo, CEO of QUAD Drone Lab
Date: April 21, 2026
![[Everything About Drone Batteries]Part 3: The Evolution to High-Voltage Systems: The World of 6S, 8S, and 12S](https://quad-drone-lab.co.kr/wp-content/uploads/2026/05/Inside-the-Intelligence-Battery-Diagram-768x429.png)
![[Everything About Drone Batteries]Part 2: Key Indicators Determining Flight Performance: Discharge Rate (C-Rating) and Internal Resistance (IR)](https://quad-drone-lab.co.kr/wp-content/uploads/2026/04/Battery-C-Rating-Label-vs-Reality-1-768x429.jpg)