
[PX4 튜닝 시리즈 부록] 레이싱 드론 튜닝 가이드 (Racer Setup): 한계를 뛰어넘는 극강의 퍼포먼스
항공우주공학과 자율비행 드론을 연구하시는 대학생, 대학원생, 그리고 연구원 여러분, 안녕하십니까!
지금까지 우리는 [시리즈 1]부터 [시리즈 7]까지 일반적인 연구용 멀티콥터의 비행 성능을 최적화하고 안전하게 착륙시키는 모든 과정을 다루었습니다. 하지만 여러분의 연구 목적이 단순히 ‘안정적으로 떠 있는 것’을 넘어, 군집 비행에서의 급기동, FPV(First-Person View) 기반의 고속 회피 기동, 혹은 레이싱 드론(Racing Drone) 제작에 있다면 기존의 튜닝 방식과는 완전히 다른 접근이 필요합니다.
레이싱 드론은 기본적으로 ‘오버파워(Overpowered)’를 전제로 설계된 매우 빠르고 민첩한 기체입니다. 무거운 센서를 과감히 떼어내고, 제어 지연 시간(Latency)을 1밀리초(ms)라도 더 줄이기 위해 극한의 설정을 적용해야 합니다. 오늘 부록 편에서는 PX4를 기반으로 레이싱 드론을 세팅하고 아크로(Acro) 모드에서 최상의 성능을 끌어내기 위한 하드웨어 및 소프트웨어 셋업 가이드를 상세히 안내해 드립니다.
1. 하드웨어 셋업: 미니멀리즘과 진동의 원천 차단
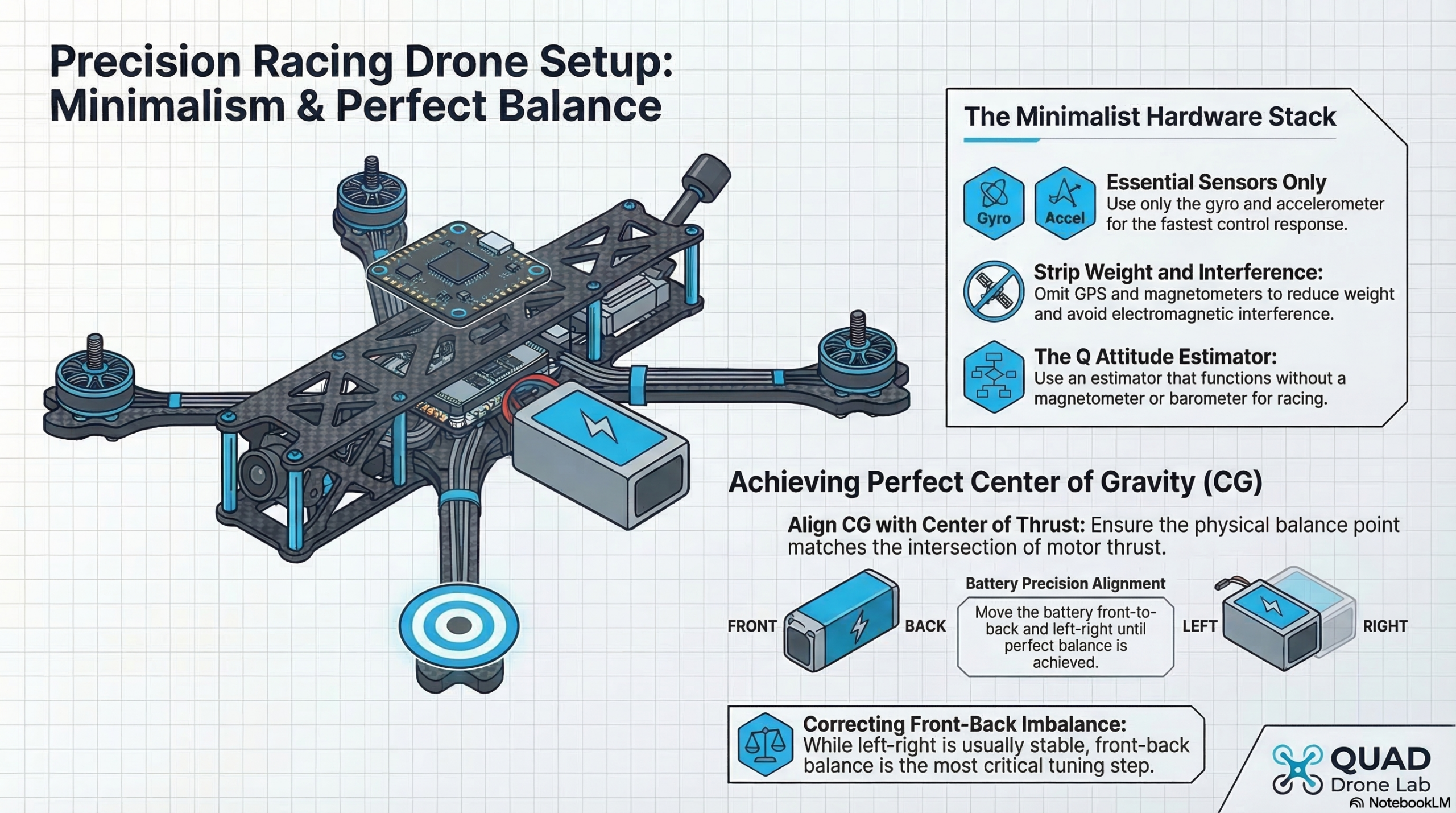
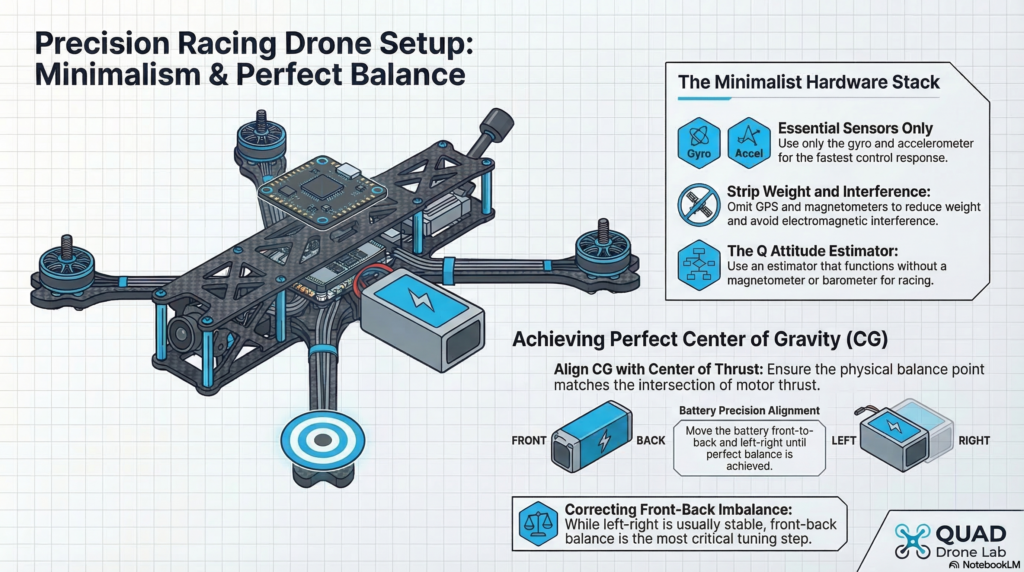
레이싱 드론은 잦은 충돌을 전제로 하므로 고장 날 수 있는 센서를 최소화하는 것이 원칙입니다.
센서의 다이어트: 레이싱 드론의 최소 구성은 오직 ‘자이로스코프(Gyro)’와 ‘가속도계(Accelerometer)’입니다. 무겁고 충돌 시 쉽게 파손되는 GPS 탑재는 권장하지 않으며, 높은 전류로 인해 강한 전자기 간섭이 발생하므로 비행 제어기(FC) 내부의 지자기 센서(Magnetometer) 역시 사용해서는 안 됩니다.
진동 억제와 무게 중심(CG): 고출력 모터를 사용하는 만큼 하드웨어 진동을 잡는 것이 소프트웨어 필터링보다 우선되어야 합니다. QUAD Drone Lab의 실제 튜닝 비행 테스트 사례에서도 볼 수 있듯, 비행 후 로그를 분석하여 60~80Hz 대역의 진동이 발견된다면 무작정 필터 값을 높이기보다는 모터와 프레임의 유격(Tolerance)을 단단히 조여 물리적인 진동을 원천적으로 차단해야 합니다. 또한 프레임에 배터리를 장착할 때 좌우 균형뿐만 아니라 전후 무게 중심(Center of Gravity)이 추력의 중심과 정확히 일치하도록 배치하고 마커로 표시해 두는 것이 좋습니다.
2. 소프트웨어 셋업: Q Estimator와 안전장치(Failsafe) 설정
GPS와 지자기 센서, 기압계(Barometer)를 제거했다면, 기본 상태 추정기(Estimator)인 EKF2는 정상적으로 작동하지 않습니다. 따라서 자기장이나 기압 정보 없이도 자세를 추정할 수 있는 **’Q Attitude Estimator’**로 변경해야 합니다.
QGroundControl(QGC)의 파라미터 메뉴에서 아래와 같이 설정해 주십시오.
# 1. 사용하지 않는 센서 비활성화
SYS_HAS_MAG = 0 # 지자기 센서 없음 [7]
SYS_HAS_BARO = 0 # 기압계 없음 [7]
# 2. 상태 추정기(Estimator) 변경 [6, 7]
ATT_EN = 1 # Q Estimator 활성화
EKF2_EN = 0 # EKF2 비활성화
LPE_EN = 0 # LPE 비활성화
# 3. Q Estimator 세부 파라미터 세팅 [7]
ATT_ACC_COMP = 0
ATT_W_ACC = 0.4
ATT_W_GYRO_BIAS = 0
안전장치 (Failsafe) 및 최소 추력: GPS가 없기 때문에 조종기 신호가 끊겼을 때 Return Mode(자동 복귀)를 사용할 수 없습니다. 따라서 RC 신호가 끊기면 즉시 모터를 꺼버리는 ‘Lockdown’ 모드로 Failsafe를 설정해야 기체가 엉뚱한 곳으로 날아가는 것을 막을 수 있습니다. 또한 언제든 조종자가 수동으로 모터를 끌 수 있는 ‘Kill Switch’를 반드시 조종기에 할당하고 훈련해야 합니다. 아크로 비행 시 자유 낙하를 위해 최소 추력인 MPC_MANTHR_MIN은 0으로 설정합니다.
3. 제어 지연 시간(Control Latency) 최소화 전략
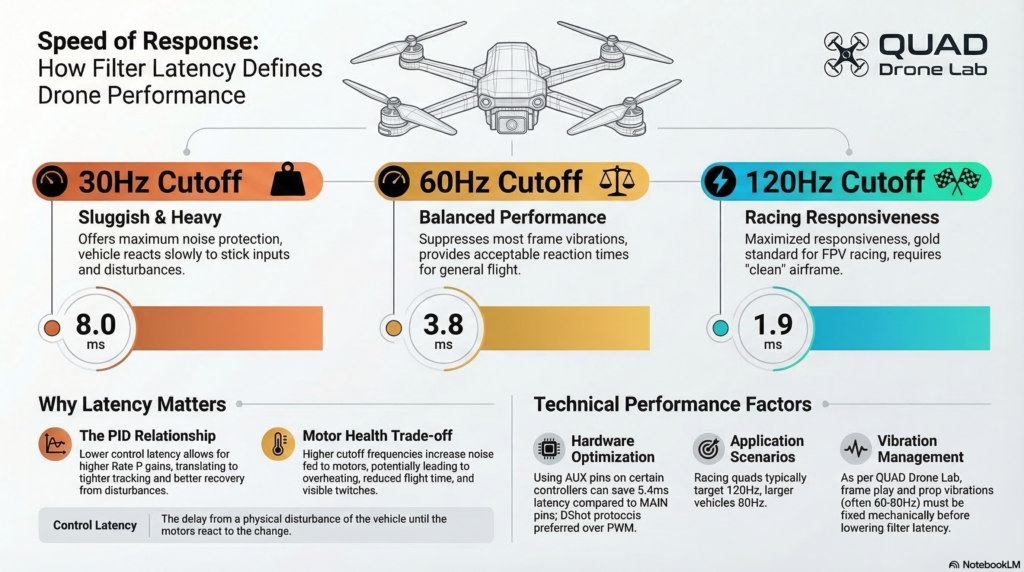
레이싱 드론에서 제어 지연 시간(Latency)을 줄이는 것은 생명과도 같습니다. 지연 시간이 줄어들수록 PID 제어기의 비례 제어(P 게인) 값을 더 높일 수 있고, 이는 곧 칼같이 정확하고 민첩한 비행 성능으로 직결됩니다. 단 1밀리초(ms)의 지연 시간 단축도 체감 비행 성능에 엄청난 차이를 만듭니다.
① MAIN 핀 대신 AUX 핀 사용하기 Pixhawk와 같은 비행 제어기를 사용할 때, 모터의 신호선을 MAIN 핀에 꽂으면 IO 칩을 거치면서 약 5.4ms의 뼈아픈 지연 시간이 추가됩니다. 이를 방지하기 위해 모터는 반드시 지연이 없는 AUX 핀에 연결하여 Actuator 설정을 마쳐야 합니다. (Pixracer나 Omnibus F4 같은 보드는 해당하지 않습니다).
② DShot 프로토콜 사용 기존의 아날로그 PWM 방식 대신 디지털 통신 방식인 DShot (또는 최소 One-Shot)을 사용하여 모터 제어 신호의 전송 속도를 극대화해야 합니다.
③ 극한의 필터 튜닝 (Filter Tuning) 필터링을 강하게 할수록 노이즈는 줄어들지만 지연 시간이 증가합니다. FPV 레이서들은 지연 시간을 최소화하기 위해 자이로 컷오프 주파수를 기본값(30Hz)보다 훨씬 높게 설정합니다.
IMU_GYRO_CUTOFF: 레이싱 드론의 경우 대략 120Hz 전후로 높게 설정합니다. (단, 모터가 뜨거워지지 않는지 반드시 확인해야 합니다).IMU_DGYRO_CUTOFF: D 항은 노이즈에 민감하므로 자이로보다는 약간 낮은 50~80Hz 사이로 설정합니다.
4. 아크로 모드(Acro Mode) 최적화와 PID 튜닝
레이싱 드론의 꽃은 조종자의 스틱 입력이 각속도(Rate) 명령으로 다이렉트로 전달되는 아크로(Acro) 모드입니다. 하지만 완벽한 아크로 비행을 위해서는 조종기 입력의 비선형성을 제거해야 합니다.
아크로 모드 사전 세팅: 아크로 모드에서 스틱 입력과 기체 회전을 1:1 선형(Linear)으로 직관적이게 매핑하기 위해 모든 Expo 설정 값을 0으로 만듭니다. 또한 레이싱에 맞게 최대 회전 속도를 대폭 상향합니다.
MC_ACRO_EXPO = 0 # 롤/피치 엑스포 해제 [18]
MC_ACRO_EXPO_Y = 0 # 요 엑스포 해제 [18]
MC_ACRO_P_MAX = 200 # 최대 피치 회전 속도 (도/초) [18]
MC_ACRO_R_MAX = 200 # 최대 롤 회전 속도 (도/초) [18]
PID 튜닝 전략: 레이싱 기체의 PID 튜닝은 두 번에 걸쳐 진행됩니다.
- 1차 튜닝 (Under-tuned): 처음에는 P 게인과 D 게인을 일부러 아주 낮게(언더튜닝) 설정하고 비행합니다. 이는 과도한 PID 게인으로 인한 진동을 물리적 하드웨어 진동(노이즈)으로 착각하는 것을 방지하여, 앞서 말한 완벽한 필터 튜닝을 진행하기 위함입니다.
- 2차 튜닝 (Tight-tuned): 필터 세팅이 끝났다면, 기체가 진동을 일으키기 직전까지 P와 D 게인을 한계치까지 밀어 올려(Tight-tuned) 응답성을 극대화합니다. 레이싱 드론의 D 게인은 작은 노이즈도 증폭시켜 모터를 뜨겁게 만들 수 있으므로 주의해서 올려야 합니다.
호버 스로틀(MPC_THR_HOVER)의 함정: 오버파워로 설계된 레이싱 드론은 스로틀을 35% 혹은 그 이하만 올려도 호버링이 가능합니다. 만약 이 값을 기본값인 0.5(50%)로 둔다면, 하강할 때 제어기가 기체가 땅에 닿았다고 착각(Ground-contact)하여 공중에서 모터 출력을 순간적으로 줄였다가 다시 높이는 끔찍한 ‘트위칭(Twitch)’ 현상이 발생합니다. 따라서 실제 호버링 스로틀 값(예: 0.35)을 정확히 입력해야 합니다.
5. 에어모드(Airmode)와 완벽한 비행의 완성
PID 튜닝과 필터 튜닝이 완벽하게 끝났다면, 마지막 화룡점정으로 **에어모드(MC_AIRMODE)**를 켜야 합니다.
일반적인 믹서(Mixer) 설정에서는 조종자가 스로틀을 0으로 내리면 롤, 피치 회전 명령도 함께 무시됩니다. 하지만 에어모드를 활성화하면 스로틀이 0이거나 매우 낮은 상태에서도 비행 제어기가 스스로 기본 추력을 살짝 부스팅(Boosting)하여 모터가 멈추지 않게 만들고, 스틱의 회전(Rate) 명령을 끝까지 추종하도록 보장합니다.
이를 통해 조종자는 레이싱 드론으로 스로틀을 완전히 끄고 건물 사이를 수직으로 낙하하는 다이브(Dive) 기술이나 공중 제비(Flip)를 돌 때 완벽하게 기체의 자세를 통제할 수 있습니다. 단, 기체의 튜닝이 불안정하여 발진(Oscillation)이 있는 상태에서 에어모드를 켜면 스로틀을 낮춰도 기체가 끝없이 하늘로 솟구치는 현상이 발생할 수 있으므로, 반드시 모든 튜닝이 성공적으로 끝난 후 가장 마지막에 활성화하시기 바랍니다.
마치며
이 부록을 통해 여러분은 기압계와 GPS를 떼어내고, Control Latency를 1ms 단위로 깎아내며, 아크로 모드와 에어모드의 진정한 성능을 봉인 해제하는 방법을 알게 되었습니다. 이제 여러분의 기체는 평범한 연구용 드론이 아니라, 조종자의 손끝 신경과 하나가 되어 중력을 거스르는 ‘레이싱 머신’으로 진화했습니다.
레이싱 드론의 튜닝은 수학적 계산만큼이나 직접 부딪히고 로그를 분석하는 직관의 영역입니다. 극한의 속도와 기동성을 다루는 만큼, 언제나 안전 사고에 유의하시고 킬 스위치(Kill switch)에 손가락을 얹은 채로 안전한 야외 환경에서 한계를 테스트하시기 바랍니다. 연구원 여러분의 짜릿하고 성공적인 비행을 응원합니다!

Author: maponarooo, CEO of QUAD Drone Lab
Date: March 14, 2026
![PX4 MAVSDK – C++ Programming [4편] C++ 앱 빌드 및 통신 연결](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0314_인포그래피-768x512.png)

![PX4 MAVSDK – C++ Programming [Part 2] Core C++ Syntax for MAVSDK](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0312_인포그래픽-768x768.jpg)
![PX4 MAVSDK – C++ Programming [12편] MAVSDK C++를 활용한 최신 자율 비행 연구 사례](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0322_인프그래피2-768x429.jpg)
![PX4 MAVSDK – C++ Programming [Episode 10] Custom Logging and Integration Testing (gtest)](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0320_인포그래피-768x419.jpg)