

PX4 MAVLink-Python 프로그래밍: 7. MAV_CMD
안녕하세요. 마케팅팀 에이든(Aiden)입니다.
오늘 소개해드릴 내용은 PX4 MAVLINK-PYTHON 프로그래밍의 7번째 단계인 MAV_CMD입니다. 해당 내용은 저희 QUAD 드론 연구소의 저작권으로 등록되어있는 내용이며 무단 배포는 지양해주시길 부탁드립니다.

MAV_CMD
개요
MAV_CMD 메세지는 자동 비행 모드에서 기체에 줄 수 있는 제어명령 목록 입니다.
MAV_CMD는 크게 COMMAND_INT 와 COMMAND_LONG 타입이 있으며, 드론에 어떠한 명령을 보낼때 사용합니다.
COMMAND_INT 는 GPS 좌표 또는 고도 정보가 포함된 명령을 보낼 때 사용해야 합니다. 이는 위치 및 고도 값에 대해 정확한 좌표 프레임을 지정할 수 있기 때문입니다.
COMMAND_INT
| Field Name | Type | Values | Description |
|---|---|---|---|
| target_system | uint8_t | System ID | |
| target_component | uint8_t | Component ID (0 : 모든 컴포넌트) | |
| frame | uint8_t | MAV_FRAME | 좌표계 |
| command | uint16_t | MAV_CMD | Command ID, see MAV_CMD enum |
| current | uint8_t | Not used (set 0) | |
| autocontinue | uint8_t | Not used (set 0) | |
| param1 | float | PARAM1 | |
| param2 | float | PARAM2 | |
| param3 | float | PARAM3 | |
| param4 | float | PARAM4 | |
| param5 | int32_t | Local: x position in meters * 1e4, Global: 위도 * 10^7 | |
| param6 | int32_t | Local: y position in meters * 1e4, Global: 경도 * 10^7 | |
| param7 | float | z position: Global: 고도 m (좌표계에 따라 절대고도, 상대고도) |
COMMAND_LONG은 매개변수 5와 6에서 부동소수점 값을 보내는 데 사용해야 합니다. 이러한 값은 COMMAND_INT에서 보내면 정수로 잘립니다.
COMMAND_LONG
| Field Name | Type | Values | Description |
|---|---|---|---|
| target_system | uint8_t | System ID | |
| target_component | uint8_t | Component ID (0 : 모든 컴포넌트) | |
| command | uint16_t | MAV_CMD | Command ID, see MAV_CMD enum |
| confirmation | uint8_t | 0: First transmission of this command. 1-255: Confirmation transmissions | |
| param1 | float | Parameter 1 (for the specific command). | |
| param2 | float | Parameter 2 (for the specific command). | |
| param3 | float | Parameter 3 (for the specific command). | |
| param4 | float | Parameter 4 (for the specific command). | |
| param5 | float | Parameter 5 (for the specific command). | |
| param6 | float | Parameter 6 (for the specific command). | |
| param7 | float | Parameter 7 (for the specific command). |
COMMAND_INT 시퀀스

요청은 COMMAND_INT 내에 인코딩된 지상국에서 전송됩니다 . 드론은 요청을 처리하고 결과를 나타내는 COMMAND_ACK 로 신속하게 응답합니다. 결과(MAV_RESULT)는 명령이 승인되었거나
(COMMAND_ACK.result=MAV_RESULT_ACCEPTED), 승인되어 진행 중이거나(MAV_RESULT_IN_PROGRESS) 일부 이유 코드와 함께 거부 됩니다. “MAV_RESULT_ACCEPTED“은 명령이 유효하고 플라이트 스택이 명령이 완료되었음을 의미하는 것이 아니라 그에 대한 조치를 시도함을 의미합니다.
대부분의 명령은 “MAV_RESULT_ACCEPTED“을 반환합니다.
COMMAND_ACK.result_param2는명령별 enum에 명령 거부 이유에 대한 추가 정보를 포함할 수도 있습니다.
ACK를 받지 못한 경우 GCS는 COMMAND_INT를다시 보냅니다.
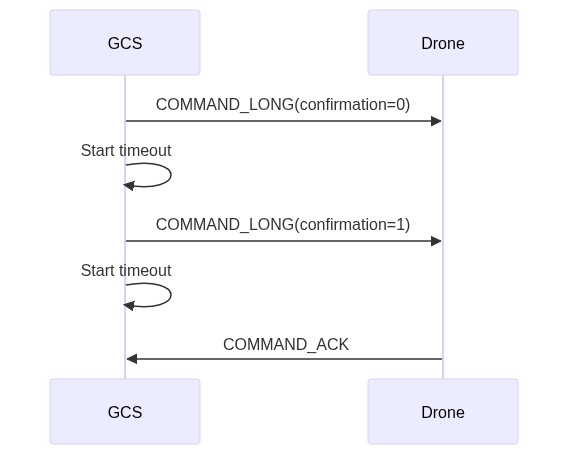
COMMAND_LONG 시퀀스
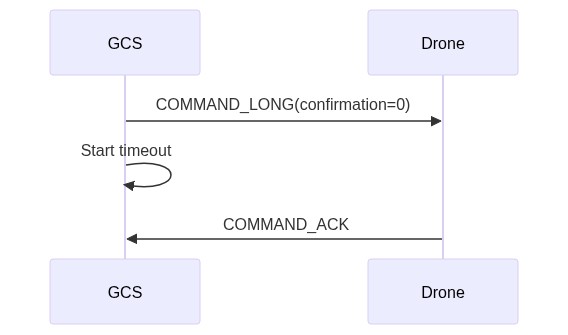
명령이 드롭되면 발신자는 confirmation 필드를 증가해야 합니다.
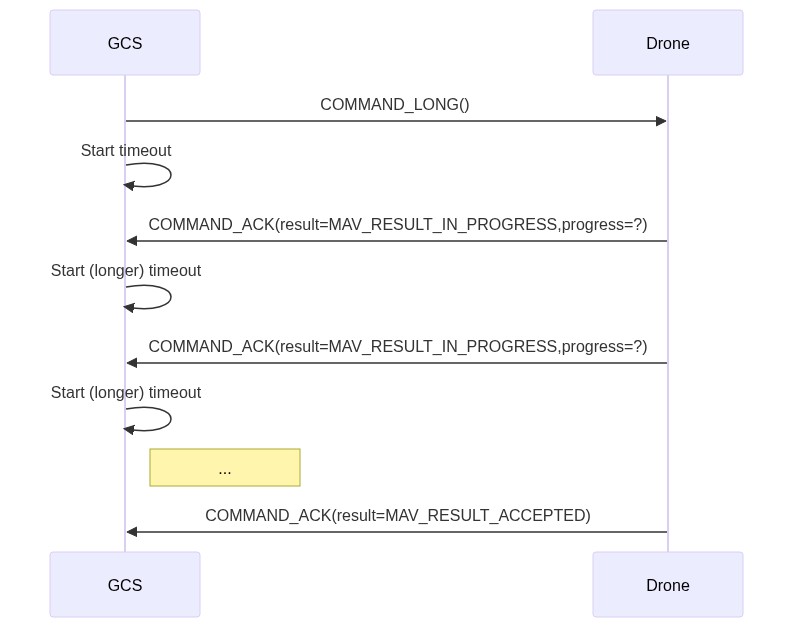
장기 실행 명령
일부 명령은 오래 실행 되며 즉시 완료할 수 없습니다. 드론은 COMMMAND_ACK 메시지를 COMMAND_ACK.result=MAV_RESULT_IN_PROGRESS 전송하여 진행률COMMMAND_ACK.progress을 보고하고 진행률을 ([0-100] 퍼센트 완료, 진행률이 제공되지 않은 경우 255) 백분율로 표시합니다. 작업이 완료되면 드론은 작업의 최종 결과 ( MAV_RESULT_ACCEPTED, MAV_RESULT_FAILED, MAV_RESULT_CANCELLED)를 포함하는 COMMMAND_ACK로종료해야 합니다.
장기 실행 작업은 COMMAND_CANCEL 메시지를 전송하여 취소할 수 있습니다 . 드론은 작업을 취소하고 COMMAND_ACK(COMMAND_ACK.result=MAV_RESULT_CANCELLED)를 보내 시퀀스를 완료해야 합니다.
- 취소가 되지 않으면 드론은 완료될 때까지 진행률 업데이트를 계속 보낼 수 있습니다.
- 시퀀스가 이미 완료되었거나 유휴 상태이면 취소 명령을 무시 합니다.
진행률 메시지MAV_RESULT_IN_PROGRESS가 내보내지는 속도는 시스템에 따라 다릅니다.
진행 또는 완료 업데이트를 기다리는 동안 시간 초과가 트리거되면 GCS는 시퀀스를 종료(유휴 상태로 돌아가기)하고 적절한 경우 사용자에게 알려야 합니다.
특정 장기 실행 명령 의 한 인스턴스만 한 번에 실행할 수 있습니다. 장기 실행 작업을 다시 시작하려면 먼저 기존 명령을 취소해야 합니다!
이 프로토콜은 수신 플라이트 스택의 상태 시스템에서 지원하는 경우 서로 다른 장기 실행 명령을 병렬로 실행할 수 있습니다.
결과 확인
COMMAND_ACK ( #77 )
| Field Name | Type | Units | Values | Description |
|---|---|---|---|---|
| command | uint16_t | MAV_CMD | Command ID (of acknowledged command). | |
| result | uint8_t | MAV_RESULT | Result of command. | |
| progress ** | uint8_t | % | The progress percentage when result is MAV_RESULT_IN_PROGRESS. Values: [0-100], or UINT8_MAX if the progress is unknown. | |
| result_param2 ** | int32_t | Additional result information. Can be set with a command-specific enum containing command-specific error reasons for why the command might be denied. If used, the associated enum must be documented in the corresponding MAV_CMD (this enum should have a 0 value to indicate “unused” or “unknown”). | ||
| target_system ** | uint8_t | System ID of the target recipient. This is the ID of the system that sent the command for which this COMMAND_ACK is an acknowledgement. | ||
| target_component ** | uint8_t | Component ID of the target recipient. This is the ID of the system that sent the command for which this COMMAND_ACK is an acknowledgement. |
YOUTUBE 강의
이상으로 PX4 MAVLINK-Python 프로그래밍의 일곱번째 단계인 MAV_CMD에 대해 알아보았습니다. 다음 글은 PX4 ‘OFFBOARD” 와 Ardupilot ‘GUIDED’ 모드 차이에 대한 글로 돌아오겠습니다.

작성자: 에이든(Aiden), 쿼드(QUAD) 드론연구소 마케팅팀
기고일: 2026.03.08
![PX4 MAVSDK – C++ Programming [10편] 사용자 정의 로깅 및 통합 테스트(gtest)](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0320_인포그래피-768x419.jpg)
![[MAVSDK C++ Part 4] Building Your Own App: Project Setup and Drone Connection](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0314_인포그래피-768x512.png)
![[PX4 튜닝 시리즈 7] 착륙 감지기 설정 (Land Detector Configuration): 완벽한 비행의 마무리를 위한 필수 가이드](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Drone-Ground-Contact-Landing-Logic-768x429.png)
![PX4 MAVSDK – C++ Programming [Part 9] Precision Drone Control: Offboard Mode](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0319_인포그래픽-768x429.jpg)