![[PX4 ROS 2 프로그래밍] 1편: PX4-ROS 2 연동 아키텍처 이해와 환경 구축](https://quad-drone-lab.co.kr/wp-content/uploads/2026/02/image-34-768x294.png)
[PX4 ROS 2 프로그래밍] 1편: PX4-ROS 2 연동 아키텍처 이해와 환경 구축
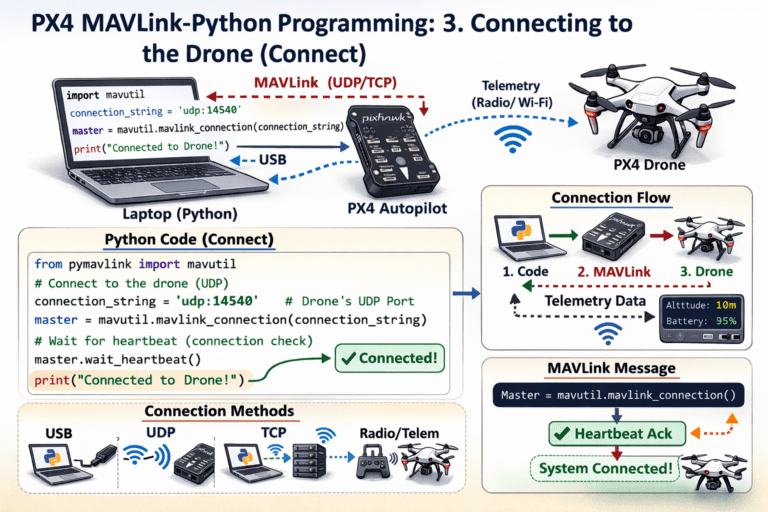
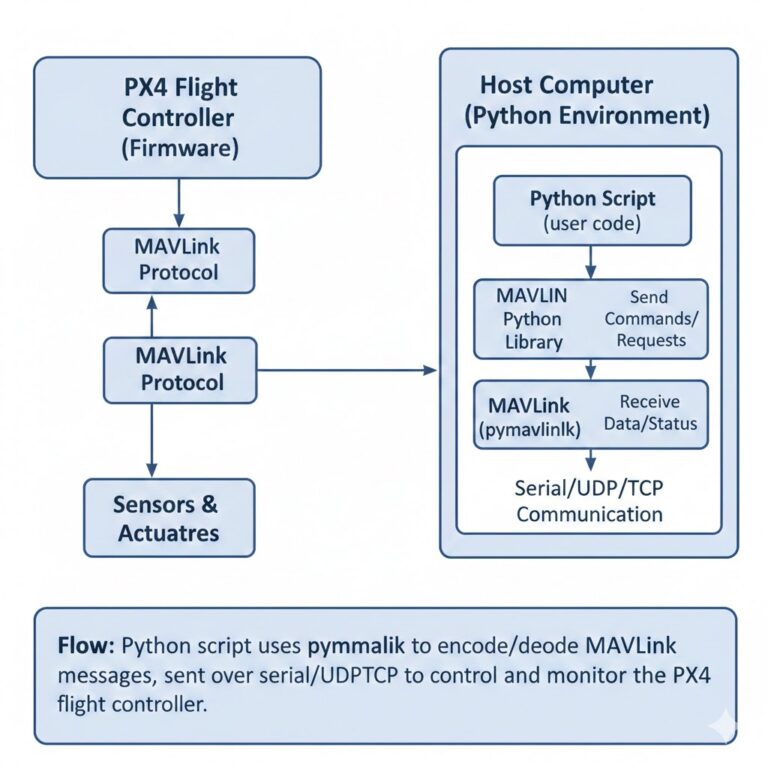
드론 자율주행이나 컴퓨터 비전 기반의 제어를 구현하기 위해 PX4와 ROS 2를 연동하는 것은 필수적인 과정입니다. 이번 포스트에서는 PX4와 ROS 2가 어떻게 통신하는지 아키텍처를 이해하고, 실제 코드를 돌려볼 수 있는 시뮬레이션 개발 환경을 구축해 보겠습니다. 1. PX4-ROS 2 연동 아키텍처 이해하기 과거 PX4(v1.13 이전)에서는 FastRTPS라는 미들웨어를 사용했지만, PX4 v1.14 버전부터는 ‘uXRCE-DDS’라는 새로운 미들웨어를 사용하여 ROS 2와…