
![PX4 MAVLink-Python 프로그래밍: 5-2. [참고]HMAC-SHA256이란?](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0308_사진-768x419.jpg)
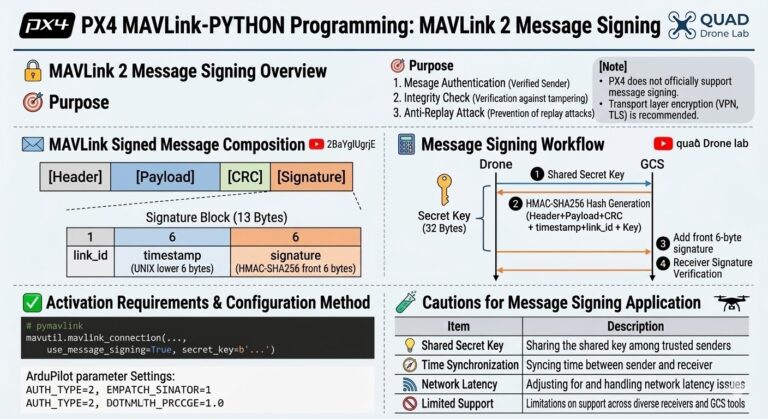
PX4 MAVLink-Python 프로그래밍: 5-2. [참고]HMAC-SHA256이란?
안녕하세요. 마케팅팀 에이든(Aiden)입니다. 오늘 소개해드릴 내용은 PX4 MAVLINK-PYTHON 프로그래밍 – MAVLINK 2 메세지 서명 과정에서 참고하실 수 있는 HMAC-SHA256입니다. 해당 내용은 저희 QUAD 드론 연구소의 저작권으로 등록되어있는 내용이며 무단 배포는 지양해주시길 부탁드립니다. ✳️ HMAC = Hash-based Message Authentication Code 예) HMAC-SHA256 → HMAC 방식에서 SHA-256 해시 함수 사용 ⚙️ 어떻게 작동하나? 입력: 출력: 🔁 내부 동작…
![[PX4 ROS 2 Programming] Part 3: Writing Basic ROS 2 Nodes (Listener & Advertiser)](https://quad-drone-lab.co.kr/wp-content/uploads/2026/02/uXRCE-DDS-브릿지-768x429.png)
![[PX4 ROS 2 Programming] Part 2: Essential Precautions for ROS 2 Programming (QoS, Coordinate Frames, and Time Sync)](https://quad-drone-lab.co.kr/wp-content/uploads/2026/02/image-36-768x319.png)