
![[ROS2 Mastery #2] Understanding ROS2 Communication Nodes and Mastering RQT for Visualization](https://quad-drone-lab.co.kr/wp-content/uploads/2026/05/0505_인포그래픽-768x419.jpg)
[ROS2 Mastery #2] Understanding ROS2 Communication Nodes and Mastering RQT for Visualization
Hello! I’m Aiden from the Marketing Team. To all the university students researching robotics and autonomous driving, and the researchers working hard in the field—did you successfully finish building your ROS2 workspace in Part 1? Now, it’s time to connect the “neural network” so your robot system can breathe. Modern robot software isn’t just one…
![[하이브리드 항법 시스템: 제4편] ROS 2를 활용한 PX4와 외부 INS 오도메트리 연계 및 통신 검증](https://quad-drone-lab.co.kr/wp-content/uploads/2026/04/Drone-Navigation-Data-Integration-Flow-768x429.jpg)
![[하이브리드 항법 시스템: 제2편] PX4 자율 항법의 원리와 Gazebo SITL 시뮬레이터 세팅](https://quad-drone-lab.co.kr/wp-content/uploads/2026/04/PX4EKF2-Architecture-768x429.jpg)
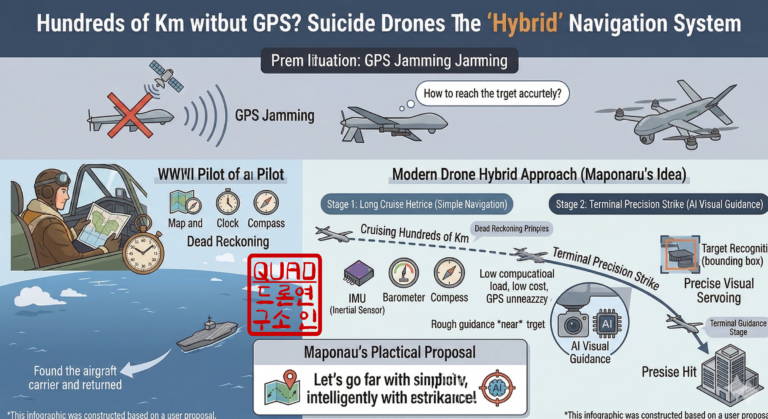
![[하이브리드 항법 시스템 제1편: 개요] GPS 없이 수백 km를 날아간다? 2차대전 조종사에게 배우는 하이브리드 항법 시스템](https://quad-drone-lab.co.kr/wp-content/uploads/2026/04/컴패니언-컴퓨터-기반의-AI-지형지물-보정-768x419.jpg)

![ROS2 Mastery [Part 2] Core Communication Concepts of ROS2 and How to Use the Powerful Utility “RQT”](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0331_그림6-768x512.png)
![ROS2 Mastery [Part 1] Complete Guide to ROS2 Jazzy Development Environment and Workspace](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0330_인포그래픽-1-768x429.png)