
드론 자재 선정 – 제어·통신부 : 911 FALCON 프로젝트
안녕하세요, 쿼드(QUAD) 드론연구소의 이근찬 선임연구원입니다.
지난 편에서는 911 FALCON 드론의 전원부(Power System) 설계와 자재 선정 과정을 정리해 보았습니다. 추력부에서 요구되는 전력 조건을 기준으로 배터리 용량을 결정하고, 비행제어기와 ESC에 안정적으로 전원을 공급하기 위한 파워모듈과 PDB를 선정한 뒤, 각 장치에 전원이 어떤 경로로 분배되는지까지 전체 전원 구조를 함께 정리했습니다.
이번 편에서는 그 다음 단계로, 드론의 비행과 운용을 직접적으로 담당하는 제어부와 통신부(Control & Communication System)를 다루겠습니다.
이번 글에서는 비행 제어를 담당하는 Flight Controller와 Companion Computer, 그리고 기체와 외부를 연결하는 GPS, 조종 링크, 영상 송신 시스템, 텔레메트리 통신까지 각각 어떤 기준으로 자재를 선정했는지 정리해 보겠습니다. 또한 마지막으로 Pixhawk를 중심으로 각 통신 장치가 어떤 구조로 연결되는지 전체 제어·통신 아키텍처도 함께 정리해 보겠습니다.

1. 제어부 (Flight Control System)
1-1) Flight Controller (FC)
제품 :
Pixhawk 6X

시스템 요구사항
911 FALCON은 GPS 기반 비행, RTL(Return To Launch), Companion Computer 연동을 사용하는 시스템입니다. 따라서 비행제어기는 안정적인 자세 제어뿐 아니라 다양한 센서와 통신 장치를 동시에 연결할 수 있는 확장성을 갖춰야 합니다.
주요 스펙
- STM32H7 MCU (480MHz)
- Dual IMU 구조
- 다수 UART / CAN 인터페이스
- PX4 / ArduPilot 지원
선정 이유
Pixhawk 6X는 산업용 드론과 연구 플랫폼에서 널리 사용되는 비행제어기로, 안정성과 확장성이 모두 검증된 플랫폼입니다. 또한 다양한 통신 포트를 제공하기 때문에 GPS, 텔레메트리, Companion Computer 등 여러 장치를 동시에 연결하기에 적합합니다.
따라서 이번 기체에서는 비행 안정성과 시스템 확장성을 동시에 확보할 수 있는 FC로 Pixhawk 6X를 선정했습니다.
1-2) Companion Computer
제품 :
Jetson Orin Nano

시스템 요구사항
911 FALCON은 단순 비행 플랫폼이 아니라 향후 요구조자 탐색과 정밀착륙 기능을 수행할 수 있는 드론 시스템을 목표로 설계되었습니다. 이를 위해 카메라 영상을 기반으로 한 비전 처리와 AI 추론을 수행할 수 있는 온보드 컴퓨팅 장치가 필요했습니다.
주요 특징
- NVIDIA Ampere GPU 기반 연산 플랫폼
- 최대 67 TOPS AI 연산 성능
- MIPI CSI 카메라 인터페이스 지원
- Pixhawk와 MAVLink 통신 가능
선정 이유
Jetson Orin Nano는 GPU 기반 병렬 연산을 통해 영상 인식과 AI 추론을 수행할 수 있는 플랫폼입니다. 이를 통해 요구조자 인식과 ArUco 마커 기반 정밀착륙 알고리즘을 실행할 수 있습니다.
따라서 이번 기체에서는 비전 기반 임무 수행을 위한 Companion Computer로 Jetson Orin Nano를 선정했습니다.
2. 통신부 (Communication System)
911 FALCON의 통신 시스템은 다음과 같은 구조로 구성됩니다.
- 위치 정보 획득 : GPS
- 조종 신호 전달 : RC Link
- 영상 전송 : FPV System
- 비행 데이터 통신 : Telemetry
각 통신 시스템은 역할이 다르기 때문에 서로 독립적인 링크로 구성하여 안정적인 운용이 가능하도록 설계했습니다.
2-1) GPS
제품 :
Holybro M10 GPS

시스템 요구사항
911 FALCON은 GPS 기반 위치 유지, 경로 비행, RTL 기능을 사용하기 때문에 안정적인 위치 정보가 필요합니다.
주요 특징
- u-blox M10 GNSS 칩셋
- 다중 위성 시스템 지원
- 높은 위치 정확도
- 내장 Compass
선정 이유
M10 GNSS 모듈은 기존 M8 계열 대비 수신 성능이 향상되어 더 많은 위성을 동시에 수신할 수 있으며 위치 정확도와 초기 위성 고정 속도가 개선되었습니다.
따라서 이번 기체에서는 자율 비행과 복귀 기능의 안정성을 확보하기 위해 M10 GPS 모듈을 선정했습니다.
2-2) 조종 신호 (RC Link)
조종기
제품 :
Jumper T20s

시스템 요구사항
자율 비행 시스템이라 하더라도 개발 및 시험 비행 단계에서는 즉각적인 수동 개입이 가능한 조종 링크가 필요합니다.
주요 특징
- ExpressLRS 지원
- 고출력 RF 모듈
- 장거리 RC 링크 운용 가능
선정 이유
Jumper T20은 ExpressLRS 시스템과 함께 운용하기 적합한 조종기로 안정적인 RF 링크와 다양한 설정 기능을 제공하기 때문에 시험 비행과 개발 환경에 적합한 조종기입니다.
수신기
제품 :
Radiomaster RP3 ExpressLRS Receiver

시스템 요구사항
조종 링크는 낮은 지연과 안정적인 신호 수신이 중요합니다.
주요 특징
- ExpressLRS 2.4GHz 기반
- 듀얼 안테나 다이버시티 구조
- LNA / PA 내장
- 고감도 수신 구조
선정 이유
RP3 수신기는 듀얼 안테나 다이버시티 구조를 통해 기체 자세 변화나 프레임 차폐 상황에서도 신호 안정성을 높일 수 있습니다. 또한 10km 이상의 장거리 RC 링크 운용이 가능해, 넓은 범위를 탐색해야 하는 수색 임무 환경에 적합한 수신기라고 판단했습니다.
3. 영상 시스템 (FPV System)
3-1) FPV Camera
제품 :
Foxeer Razer Mini

시스템 요구사항
기체 상태 확인과 시험 비행을 위해 지연이 적은 FPV 영상 시스템이 필요했습니다.
주요 특징
- Low latency FPV camera
- 소형 경량 구조
- FPV 시스템 호환
선정 이유
Foxeer Razer 카메라는 FPV 드론에서 널리 사용되는 카메라로 안정적인 영상 품질과 낮은 지연 특성을 제공하기 때문에 FPV 시스템에 적합한 장비입니다.
3-2) OSD
제품 :
Holybro Micro OSD V2

시스템 요구사항
911 FALCON은 시험 비행과 운용 과정에서 기체의 상태 정보를 직관적으로 확인할 수 있는 인터페이스가 필요했습니다. 특히 배터리 전압, 비행 모드, 고도와 같은 비행 정보를 영상 화면에서도 확인할 수 있어야 조종자가 기체 상태를 빠르게 파악할 수 있습니다.
주요 특징
- Pixhawk 기반 비행제어기와 호환
- 아날로그 FPV 영상 Overlay 지원
- 배터리 전압 / 비행 모드 / 기본 텔레메트리 표시
- 소형 경량 구조
선정 이유
Holybro Micro OSD V2는 비행제어기에서 전달되는 텔레메트리 데이터를 FPV 영상 위에 Overlay 형태로 표시할 수 있는 OSD 모듈입니다. 이를 통해 조종자는 별도의 지상국 화면을 확인하지 않아도 영상 화면만으로 기체의 기본 상태를 직관적으로 확인할 수 있습니다.
따라서 이번 기체에서는 영상 시스템과 비행 정보를 함께 확인할 수 있도록 Holybro Micro OSD V2를 선정했습니다.
3-3) VTX (영상 송신기)
제품 :
AKK FX2 Ultimate VTX

시스템 요구사항
911 FALCON은 수색 임무 수행을 고려한 플랫폼이기 때문에 기체에서 촬영된 영상을 지상에서 안정적으로 확인할 수 있는 영상 송신 시스템이 필요했습니다.
주요 특징
- 5.8 GHz 아날로그 영상 송신
- 최대 1200 mW 출력
- 출력 단계 조절 가능
- 소형 경량 구조
선정 이유
AKK FX2 Ultimate VTX는 최대 1200mW 출력의 영상 송신을 지원하며, 개방된 환경 기준 약 5km 이상의 영상 송신 거리를 확보할 수 있는 성능을 제공합니다. 이러한 특성은 기체와 조종자 사이의 거리가 넓어질 수 있는 수색 환경에서도 안정적으로 영상을 확인할 수 있게 해줍니다.
따라서 이번 기체에서는 장거리 영상 링크 확보를 위해 AKK FX2 Ultimate VTX를 선정했습니다.
4. 시스템 통신
4-1) Pixhawk – Jetson 통신
제품 :
FTDI USB-UART Converter

시스템 요구사항
Pixhawk와 Companion Computer 간 MAVLink 통신이 필요합니다.
주요 특징
- USB to UART 변환
- 안정적인 시리얼 통신 지원
선정 이유
FTDI 기반 컨버터는 UART 통신 안정성이 높아 Pixhawk와 Jetson 간 MAVLink 데이터 통신 링크를 안정적으로 구성할 수 있습니다.
4-2) Pixhawk – Ground Control 통신
제품 :
Microair LR900-F Telemetry Module

시스템 요구사항
기체 상태를 지상국에서 실시간으로 확인하고 비행 데이터를 안정적으로 수신할 수 있어야 합니다.
주요 특징
- 900MHz 대역 통신
- 최대 500mW(27dBm) 출력
- 장거리 LoRa 기반 데이터 링크
- MAVLink 통신 지원
선정 이유
Microair LR900-F는 900MHz 대역을 사용하는 장거리 텔레메트리 모듈로, 장애물이 적은 환경에서 장거리 데이터 통신이 가능합니다.
예상 통신 거리는 지형에 따라 다음과 같이 나타납니다.
- 도심 환경: 약 1~5 km
- 산악 지형: 약 1 km 미만 ~ 20 km 이상
- 해양 환경: 약 20~30 km 이상
따라서 LR900-F는 넓은 범위를 운용해야 하는 드론 임무에서도 기체 상태를 안정적으로 수신할 수 있어 수색용 플랫폼에 적합한 텔레메트리 모듈이라고 판단했습니다.
제어·통신 구조 요약
다음은 제어·통신 시스템 전체 연결 구조를 정리한 것입니다.
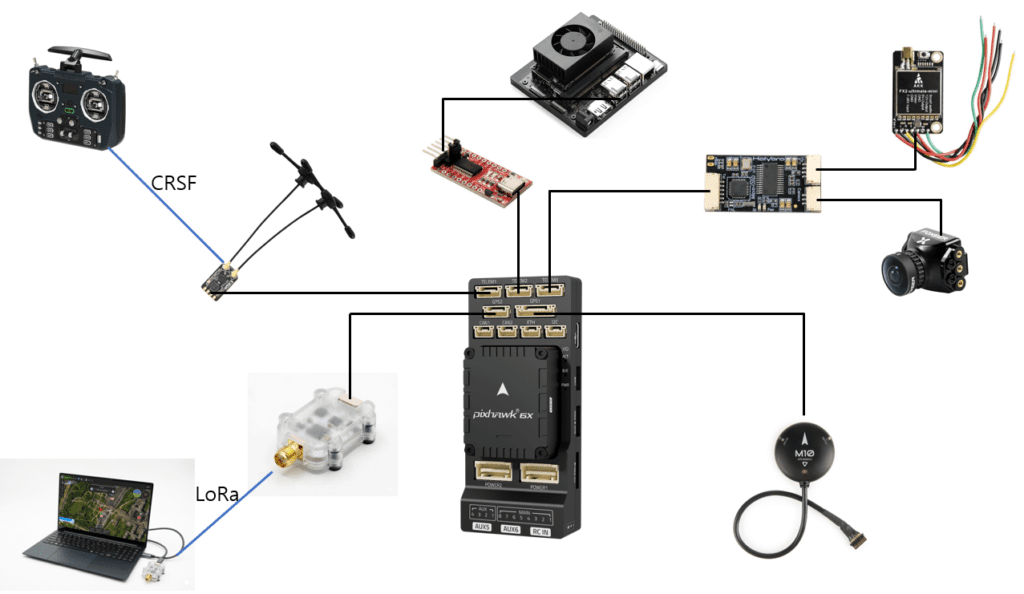
911 FALCON 드론은 Pixhawk 6X를 중심으로 GPS, 조종 링크, 텔레메트리, 영상 시스템, Jetson Orin Nano가 각각 연결되어, 비행 제어와 데이터 통신이 하나의 구조로 동작합니다.
이번 글에서는 911 FALCON 드론의 제어부와 통신부를 구성하는 주요 자재 선정 기준을 정리해 보았습니다. 비행제어기와 Companion Computer는 기체 내부에서 비행 안정화와 비전 처리를 담당하고, GPS·조종 링크·영상 시스템·텔레메트리 모듈은 기체와 외부 시스템을 연결하는 통신 구조를 형성합니다.
다음 편에서는 드론 제작 과정의 다음 단계인 기체 CAD 설계와 구조 설계 과정을 다루겠습니다. 지금까지 선정한 추력부, 전원부, 제어·통신부 자재들을 실제 기체 안에 어떻게 배치하고, 치수와 간섭을 어떻게 검토했는지, 그리고 제작을 위해 어떤 구조적 기준을 세웠는지 중심으로 정리해 보겠습니다. 감사합니다.

작성자: 이근찬, 쿼드(QUAD) 드론연구소 선임연구원
기고일: 2026.03.15
![PX4 MAVSDK – C++ Programming [Part 9] Precision Drone Control: Offboard Mode](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0319_인포그래픽-768x429.jpg)
![[PX4 Tuning Series 6] Trajectory Generator and Setpoint Tuning: The Art of Flight Feel and Smooth S-Curves](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Drone-Trajectory-Comparison-768x429.png)
![[PX4 Tuning Series Appendix] Racing Drone Tuning Guide (Racer Setup): Unlocking Extreme Performance](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Racing-Drone-Minimalism-and-Balance-768x429.png)
![PX4 MAVSDK – C++ Programming [3편] MAVSDK C++ 설치 및 SITL 시뮬레이션 환경 구축](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0313_인포그래픽-768x419.jpg)
![PX4 MAVSDK – C++ Programming [Episode 6] Basic Flight Control using Action API](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0316_인포그래피-768x512.png)