배터리 교체 스테이션 – 스왑 메커니즘 및 요구사항 : 911 FALCON 프로젝트
안녕하세요, 쿼드(QUAD) 드론연구소의 이근찬 선임연구원입니다.
지난 편에서는 911 FALCON 드론의 프레임 설계, 주요 부품 배치, 그리고 전용 마운트 설계 과정을 순차적으로 정리해 보았습니다. 이번 글에서는 911 FALCON 시스템의 핵심 기능 중 하나인 배터리 교체 시스템에 대해 다루고자 합니다.
911 FALCON은 재난 현장에서 탐색과 구호 임무를 반복적으로 수행하는 것을 목표로 하는 시스템입니다. 따라서 단순히 1회 비행 후 임무를 종료하는 구조가 아니라, 드론이 임무를 마친 뒤 스테이션으로 복귀하고, 배터리를 교체한 뒤 다시 이륙하여 다음 임무를 수행할 수 있어야 합니다.
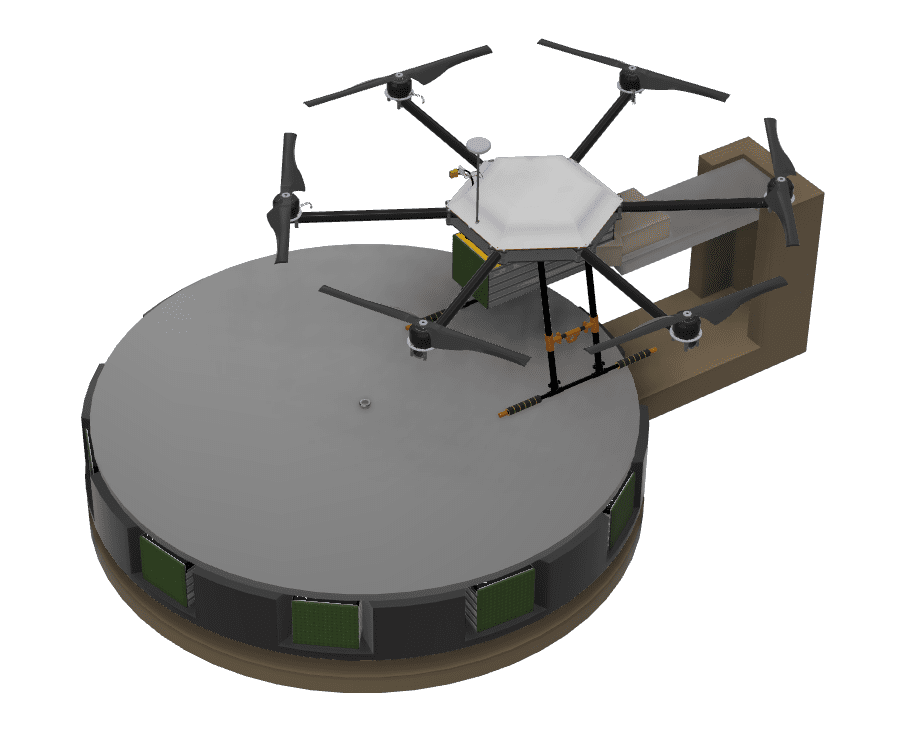
이를 위해 본 프로젝트에서는 자율주행 차량 위에 탑재되는 배터리 교체 스테이션을 구성하고, 드론 착륙 이후 자동으로 배터리를 교체할 수 있는 구조를 구상했습니다. 이번 글에서는 이러한 배터리 스왑 시스템의 기본 아이디어, 전체 구조, 동작 시퀀스, 그리고 설계 요구사항을 중심으로 정리해 보겠습니다.
1. 배터리 교체 시스템 개요
1-1) 배터리 교체 시스템이 필요한 이유
일반적인 드론 운용에서는 배터리 잔량이 부족해지면 기체를 회수한 뒤 사람이 직접 배터리를 교체하고 다시 이륙시키는 방식이 사용됩니다. 하지만 911 FALCON이 목표로 하는 재난 대응 임무에서는 이러한 방식이 연속 운용 측면에서 한계를 가질 수 있습니다.
특히 넓은 수색 구역을 반복적으로 탐색하거나, 물자 이송과 복귀가 연속적으로 이루어져야 하는 경우에는 배터리 교체 과정까지 포함하여 전체 임무 흐름을 자동화할 필요가 있습니다. 따라서 본 프로젝트에서는 드론이 스테이션에 정밀착륙한 이후, 별도의 수작업 없이 자동으로 배터리를 교체하고 다시 임무를 이어갈 수 있는 구조를 목표로 하였습니다.
1-2) 기본 구조
911 FALCON의 배터리 교체 시스템은 자율주행 차량 위에 장착되는 배터리 교체 스테이션을 기준으로 구성됩니다. 드론이 정밀착륙을 완료하면, 스테이션은 이를 기준으로 배터리 교체 시퀀스를 시작하게 됩니다.
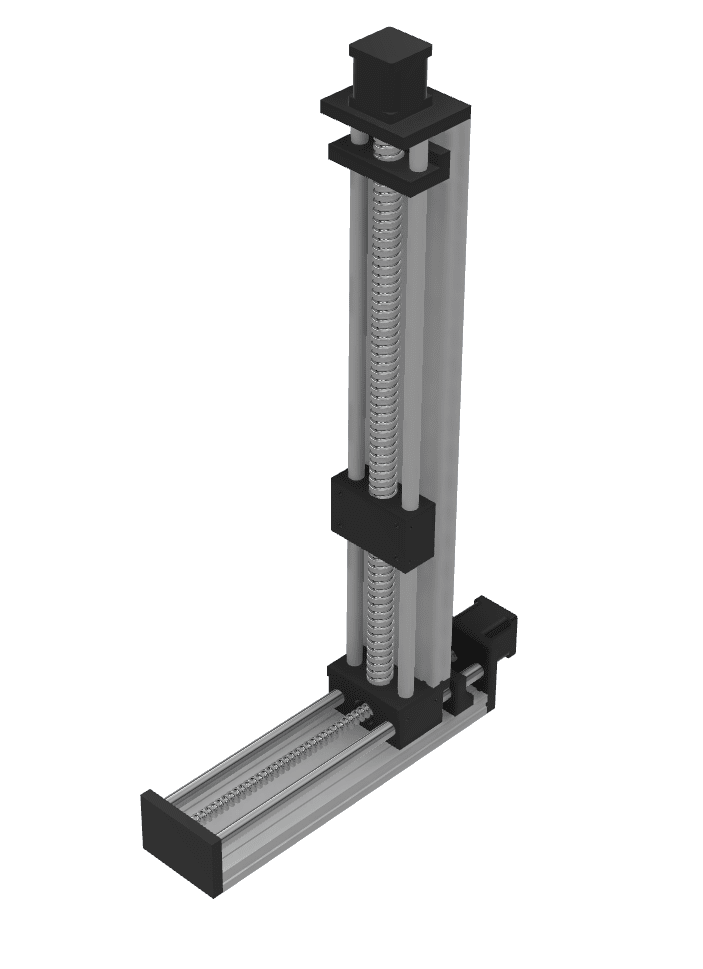
배터리 탈착 동작은 X축과 Z축, 두 개의 리니어 액추에이터를 통해 수행하도록 구상했습니다. 이때 X축 리니어 액추에이터는 배터리를 드론에서 빼내거나 다시 밀어 넣는 역할을 담당하고, Z축 리니어 액추에이터는 상하 방향 이동을 통해 배터리 교체 위치를 맞추는 역할을 담당합니다.
즉, 하나의 축은 배터리 탈착을 담당하고, 다른 하나의 축은 높이 정렬을 담당하는 구조입니다.
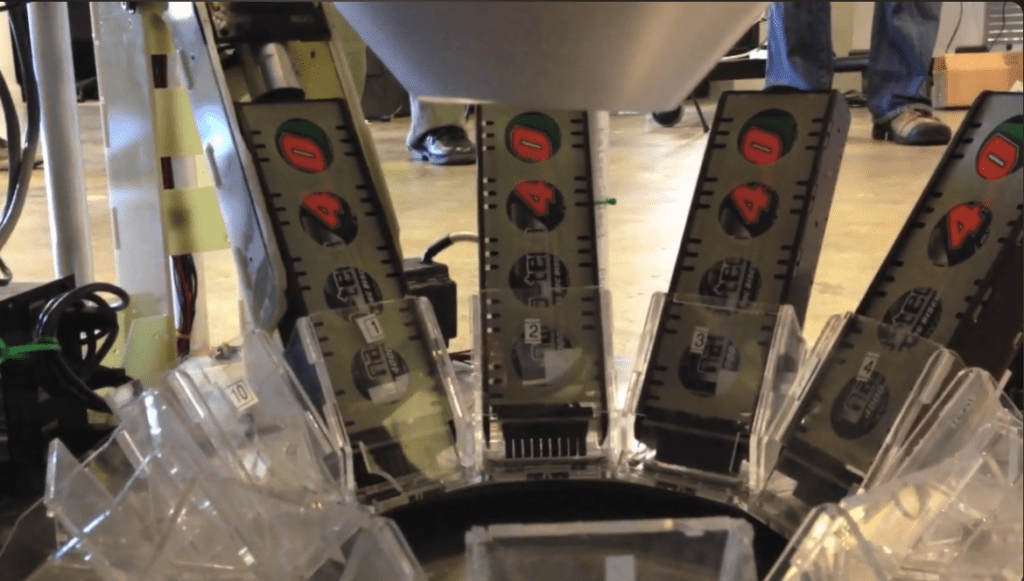
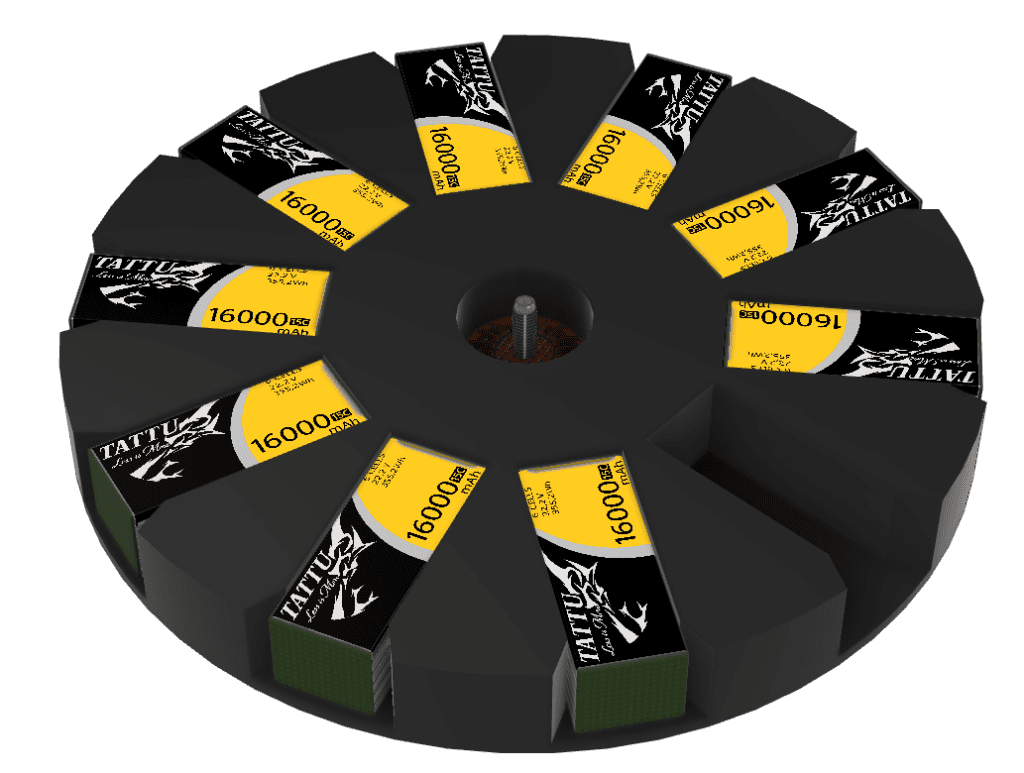
1-3) 캐러셀 구조
스테이션 하부에는 여러 개의 배터리를 저장하고 순차적으로 공급하기 위해 회전형 원판 구조인 캐러셀(carousel) 방식을 적용했습니다. 이 구조에는 9개의 배터리와 1개의 빈칸이 존재하도록 하여, 사용이 끝난 배터리를 빈칸에 넣고, 이후 새 배터리를 교체 위치로 가져올 수 있도록 했습니다.
캐러셀 구조는 드론이 상부에 착륙하고, 후방의 리니어 액추에이터가 배터리 탈착을 수행하며, 하부의 회전형 캐러셀이 배터리 위치를 순차적으로 정렬하는 방식으로 구성했습니다. 스테이션 하부 중앙에는 스텝모터가 배치되어 있으며, 이 스텝모터가 캐러셀을 회전시켜 리니어 액추에이터와 특정 배터리 홀의 위치를 맞추는 역할을 합니다.
즉, 리니어 액추에이터가 직접 모든 배터리 위치를 찾아 움직이는 것이 아니라, 캐러셀이 회전하여 필요한 배터리 칸 또는 빈칸을 액추에이터 위치로 가져오는 구조입니다.
https://www.youtube.com/watch?v=keBgvnn4wIA
2. 배터리 교체 시퀀스
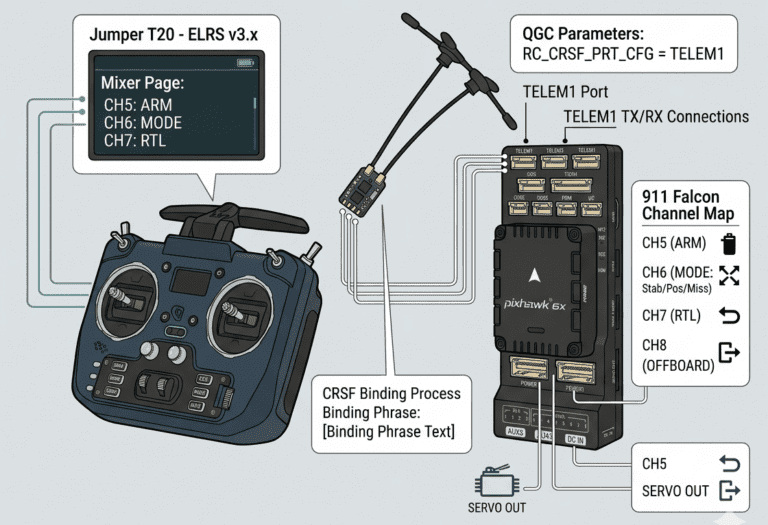
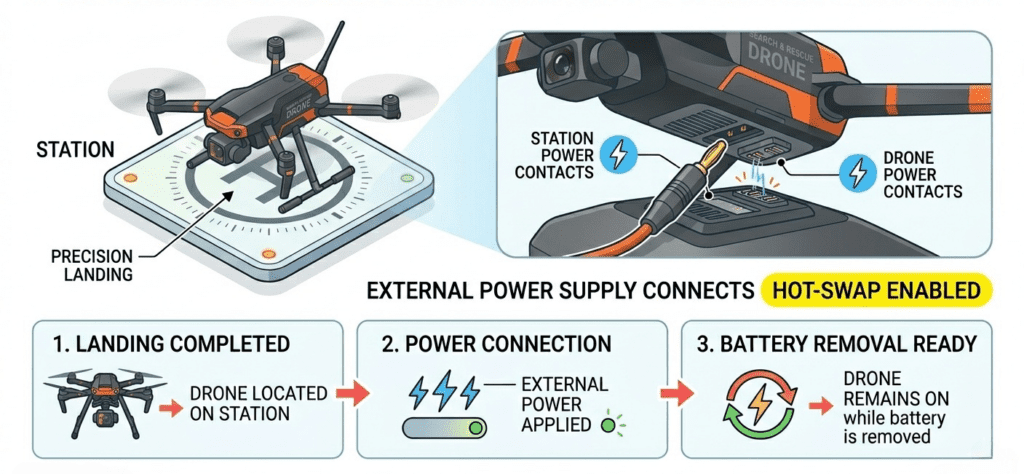
2-1) 정밀착륙 및 외부 전원 연결
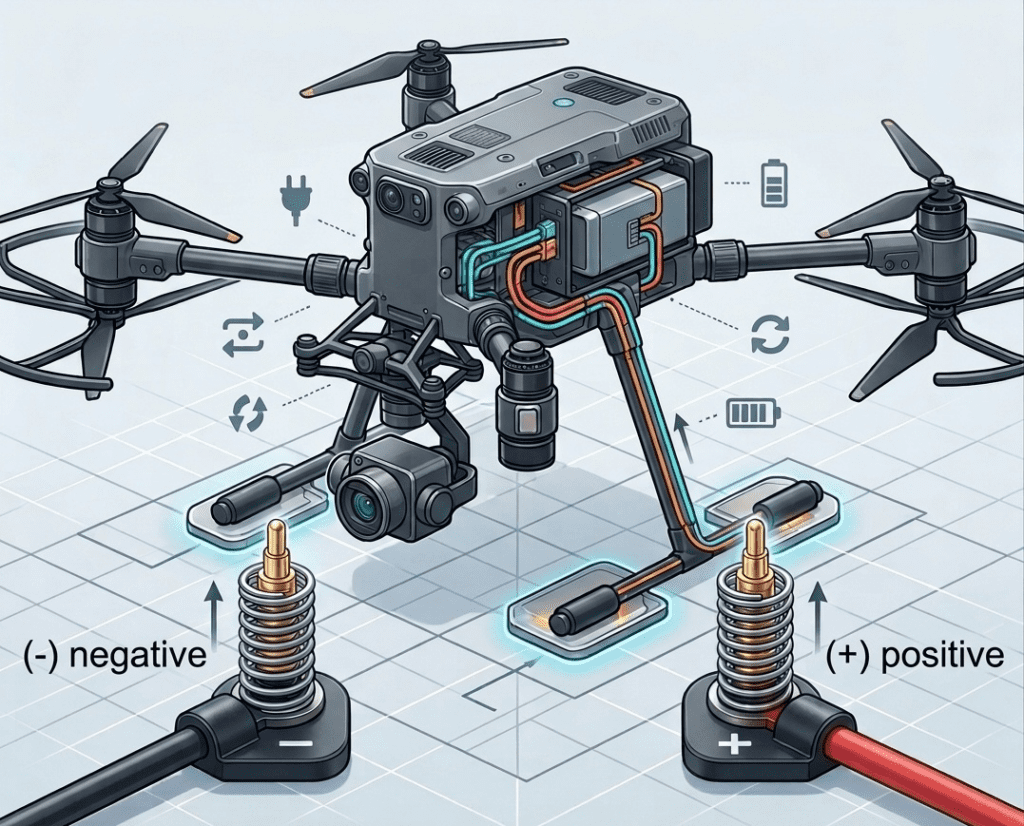
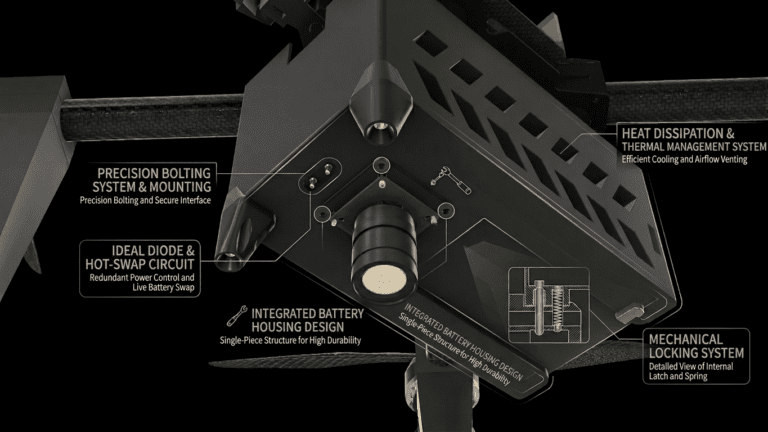
배터리 교체는 드론이 스테이션 위에 정밀착륙을 완료한 뒤 시작됩니다. 먼저 스테이션 상부에 위치한 전원 접점이 드론과 연결되어 외부 전원을 공급합니다.
이 단계는 배터리를 제거하는 동안에도 드론의 전원이 꺼지지 않도록 하기 위한 것으로, 전체 배터리 교체 과정에서 핫스왑(hot-swap)이 가능하도록 하는 핵심 조건입니다.
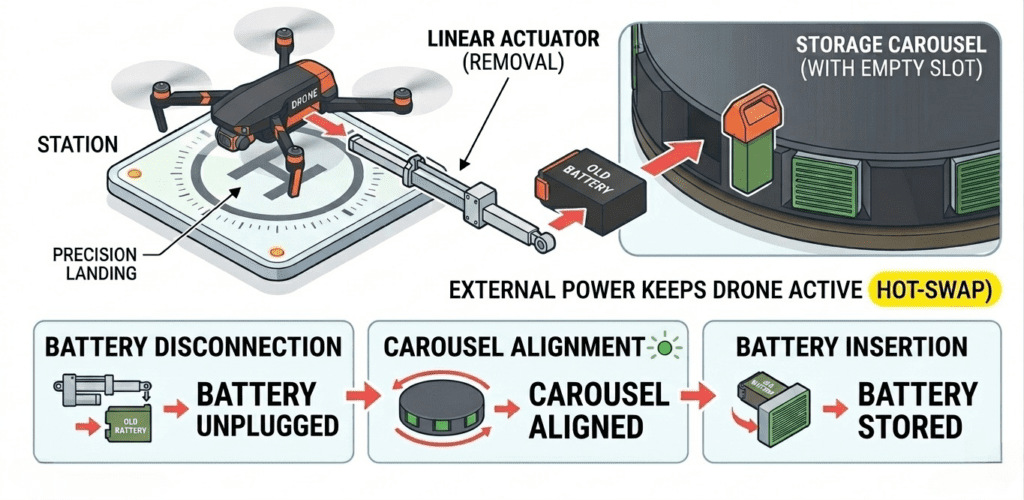
2-2) 기존 배터리 제거 및 빈칸 정렬
외부 전원이 연결된 이후에는 리니어 액추에이터가 기존 배터리를 드론에서 분리하여 꺼내게 됩니다. 이후 스텝모터가 캐러셀을 회전시켜 빈칸이 리니어 액추에이터와 정렬되도록 만듭니다.
그 상태에서 제거한 배터리를 캐러셀의 빈칸에 삽입합니다. 즉, 사용이 끝난 배터리는 먼저 빈칸으로 이동되어 저장되는 방식입니다.
2-3) 새 배터리 정렬 및 장착
기존 배터리를 빈칸에 넣은 뒤에는 다시 캐러셀을 회전시켜, 이번에는 새 배터리가 들어 있는 칸이 리니어 액추에이터와 정렬되도록 만듭니다.
이후 리니어 액추에이터가 해당 칸에서 새 배터리를 꺼내 드론 쪽으로 이송하고, 배터리를 다시 장착하게 됩니다. 교체가 완료되면 드론은 다시 이륙하여 남은 임무를 수행하게 됩니다.
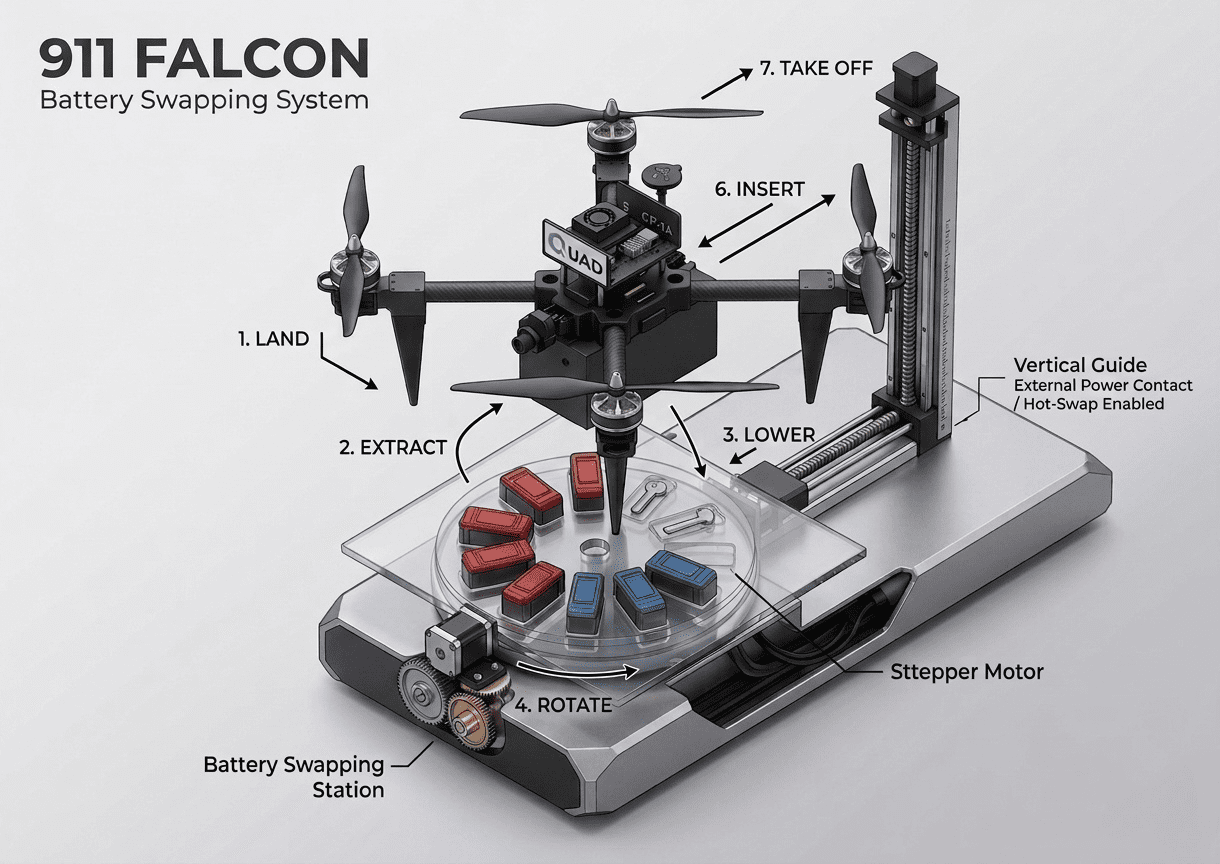
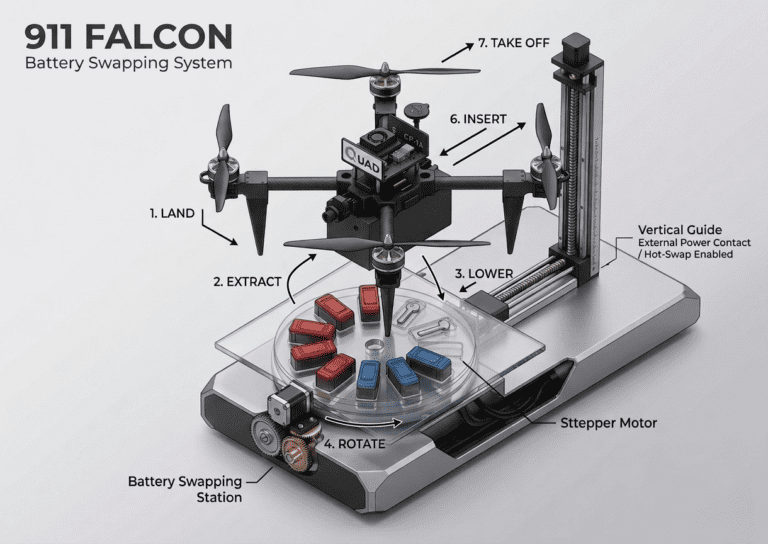
2-4) 전체 시퀀스 요약
결국 이번 구조는 착륙 → 외부 전원 연결 → 기존 배터리 제거 → 캐러셀 빈칸 정렬 및 배터리 삽입 → 새 배터리 칸 정렬 → 새 배터리 장착 → 재이륙의 순서로 동작하는 방식입니다.
3. 채택한 방식과 설계 요구사항
3-1) 전원 유지 조건
이번 배터리 교체 시스템에서 가장 중요했던 점은, 단순히 배터리를 보관하는 것이 아니라 드론이 전원이 유지된 상태에서 배터리를 교체할 수 있어야 한다는 점, 즉 핫스왑이 가능해야 한다는 점이었습니다.
따라서 스테이션 상부 전원 접점을 통해 배터리 제거 중에도 드론에 안정적으로 전원을 공급할 수 있어야 했습니다. 만약 이 조건이 확보되지 않으면, 배터리 분리 과정에서 기체 전원이 꺼지게 되고 전체 교체 시퀀스가 성립하지 않게 됩니다.
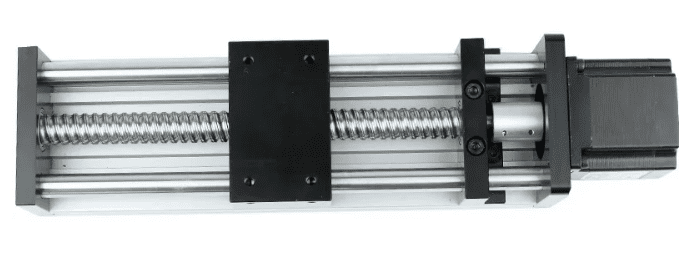
3-2) 리니어 액추에이터 채택 이유
배터리 탈착을 위한 구조는 직선 방향으로 정확하게 밀고 당길 수 있어야 했기 때문에, 회전 링크보다는 리니어 액추에이터 기반 방식이 더 적합하다고 판단했습니다.
특히 X축은 탈착, Z축은 상하 위치 정렬로 역할을 분리함으로써, 구조를 비교적 단순하게 유지하면서도 필요한 동작을 분명하게 나눌 수 있도록 했습니다.
3-3) 캐러셀 구조 채택 이유
배터리 저장 구조에서는 여러 개의 배터리를 한정된 공간 안에 보관하면서, 사용한 배터리와 새 배터리를 순차적으로 교체 위치에 배치할 수 있어야 했습니다. 동시에 본 프로젝트에서는 배터리 교체를 두 개의 리니어 액추에이터만으로 수행할 수 있는 단순한 구조를 만드는 것도 중요한 조건이었습니다.
이를 위해 캐러셀 구조를 적용하였고, 9개의 배터리와 1개의 빈칸을 두는 방식으로 사용 배터리 회수와 새 배터리 공급이 가능하도록 구상했습니다. 반면 배터리를 격자 구조로 보관할 경우에는 위치 정렬을 위해 Y축 리니어 액추에이터가 추가로 필요하게 되어 구조가 더 복잡해집니다.
따라서 이번 프로젝트에서는 재난 현장에서 반복적으로 운용되는 수색용 드론 시스템이라는 점을 고려했을 때, X축과 Z축 두 개의 액추에이터만으로 교체를 수행할 수 있는 캐러셀 구조가 더 적합하다고 판단했습니다.
3-4) 핵심 요구사항 정리
- 드론 정밀착륙 이후 자동으로 교체 시퀀스를 시작할 수 있어야 함
- 배터리 교체 과정에서 핫스왑이 가능하도록 드론 전원이 유지되어야 함
- 배터리를 직선 방향으로 안정적으로 탈착할 수 있어야 함
- 다수의 배터리를 저장하고 순차적으로 공급할 수 있어야 함
- 캐러셀의 빈칸과 배터리 칸을 액추에이터 위치에 정확하게 정렬할 수 있어야 함
- 교체 완료 후 드론이 다시 이륙해 임무를 이어갈 수 있어야 함
이번 글에서는 911 FALCON 시스템에 적용할 배터리 교체 시스템의 기본 아이디어와 구조, 그리고 동작 시퀀스를 정리해 보았습니다. 본 시스템은 자율주행 차량 위에 탑재되는 스테이션을 기준으로, X축·Z축 리니어 액추에이터, 캐러셀 구조, 스텝모터를 활용하여 드론 배터리를 자동으로 교체하는 방식을 목표로 하고 있습니다.
특히 드론이 스테이션에 정밀착륙한 이후, 상부 전원 접점을 통해 핫스왑이 가능하도록 기체 전원을 유지한 상태에서 기존 배터리를 제거하고, 캐러셀을 회전시켜 빈칸과 새 배터리 칸을 순차적으로 정렬한 뒤, 새로운 배터리를 장착하는 방식으로 전체 시퀀스를 구성했습니다.
다음 편에서는 이번에 정리한 배터리 교체 메커니즘과 요구사항을 바탕으로, 실제 배터리 작업과 배터리 하우징 설계 및 제작 과정을 중심으로 이어서 정리해 보겠습니다. 감사합니다.

작성자: 이근찬, 쿼드(QUAD) 드론연구소 선임연구원
기고일: 2026.04.08


![[Hybrid Navigation System Series Part 5: Implementation-Stage 1] Cruising Phase: Classical Dead Reckoning, Wind Estimation, and Gazebo Wind Simulation](https://quad-drone-lab.co.kr/wp-content/uploads/2026/05/Drone-Vector-Navigation-Crab-Angle-768x429.png)