
배터리 하우징 설계 : 911 FALCON 프로젝트
안녕하세요, 쿼드(QUAD) 드론연구소의 이근찬 선임연구원입니다.
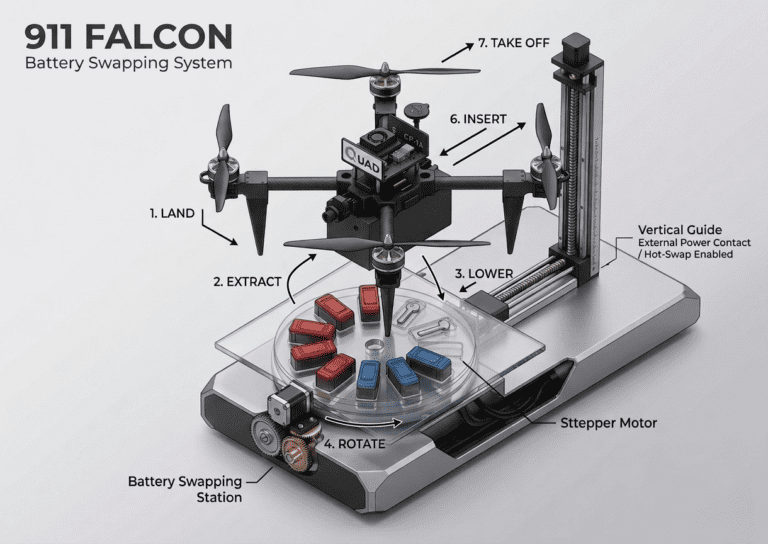
지난 편에서는 911 FALCON 시스템의 핵심 기능 중 하나인 배터리 교체 시스템의 기본 아이디어와 전체 구조를 정리해 보았습니다. 자율주행 차량 위에 탑재되는 배터리 교체 스테이션을 기준으로, X축·Z축 리니어 액추에이터와 캐러셀 구조, 스텝모터를 활용해 드론 배터리를 자동으로 교체하는 방식을 구상했으며, 드론이 스테이션에 정밀착륙한 이후 핫스왑이 가능하도록 기체 전원을 유지한 상태에서 기존 배터리를 제거하고 새 배터리를 장착하는 전체 시퀀스를 함께 살펴보았습니다.
이번 글에서는 그 다음 단계로, 실제 배터리 교체를 가능하게 하는 배터리 하우징 설계 과정을 다루겠습니다. 하우징의 기본 구성을 시작으로, 전원 접점 설계, 볼팅 위치, 카메라 및 단자 소켓 마운팅 홀, 락킹 시스템, 아이디얼 다이오드, 방열 홀 순으로 각 설계 요소와 그 과정에서 고려했던 구조적 문제들을 중심으로 정리해 보겠습니다.
1. 설계 개요
1-1) 배터리 하우징이 필요한 이유
911 FALCON의 배터리 교체 시스템은 리니어 액추에이터의 X축 단일 방향 움직임만으로 배터리를 삽입하고 제거하는 구조입니다. 이를 위해서는 배터리가 단순히 드론에 연결되는 것이 아니라, 슬라이드 결착만으로 전원 접점이 맞물리고, 비행 중에는 안전하게 고정되는 전용 인터페이스 구조가 필요했습니다.
1-2) 하우징 구성
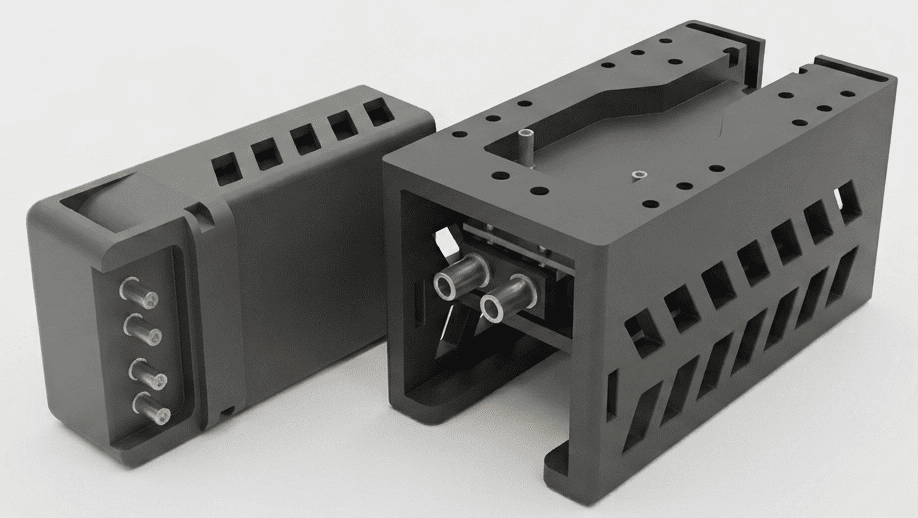
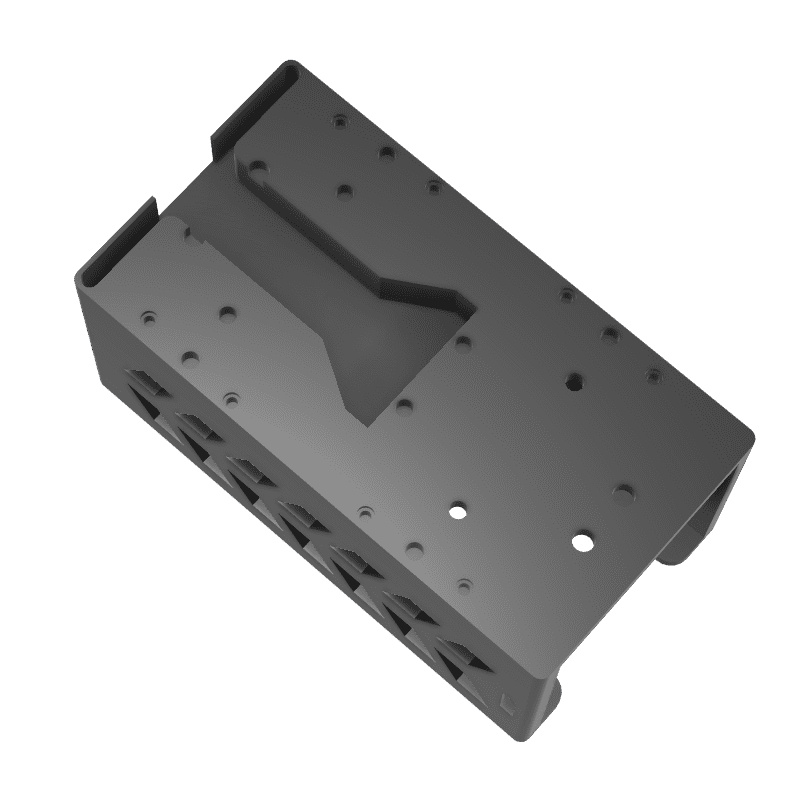
이러한 요구사항을 반영하여 하우징은 크게 배터리 하우징과 드론 하우징 두 파트로 구성됩니다.
- 드론 하우징: 드론 하판 하부에 고정되며, 배터리 하우징이 결착되는 수용 구조
- 배터리 하우징: 배터리에 직접 결선되며, 슬라이드 방식으로 드론 하우징에 삽입·분리
2. 전원 접점 설계 — XT90 단자 방식 채택
일반적인 드론은 배터리를 밸크로 스트랩으로 고정하고, XT 커넥터를 직접 연결하는 방식으로 전원을 공급합니다. 그러나 911 FALCON은 리니어 액추에이터를 통해 배터리를 자동으로 삽입·분리해야 하기 때문에, 슬라이드 결착 동작만으로 전원이 자동으로 연결되고 차단되는 접점 구조가 필요했습니다.
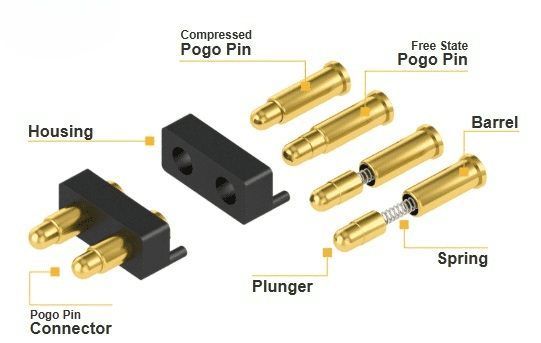
2-1) 포고핀 방식 검토 및 한계
처음에는 슬라이드 결착 방식에 적합한 포고핀(Pogo Pin) 을 전원 접점으로 사용하는 방안을 검토했습니다. 포고핀은 스프링 방식으로 접점이 자동으로 맞물리는 구조로, 슬라이드 결착 방식과 궁합이 좋은 부품입니다.
그러나 911 FALCON 드론은 안전 마진을 고려했을 때 최대 200A의 전류를 소비합니다. 포고핀은 일반적으로 수 암페어(A) 수준의 신호 전달에 특화된 부품으로, 이 수준의 대전류를 안정적으로 공급하기에는 무리가 있었습니다.
2-2) XT90 단자 방식 채택
이를 해결하기 위해 XT90 커넥터의 황동 단자를 분리하여 접점으로 활용하는 방식을 채택했습니다. XT90 단자는 드론 분야에서 대전류 공급에 널리 사용되는 검증된 부품으로, 200A 수준의 전류를 안정적으로 공급할 수 있습니다.
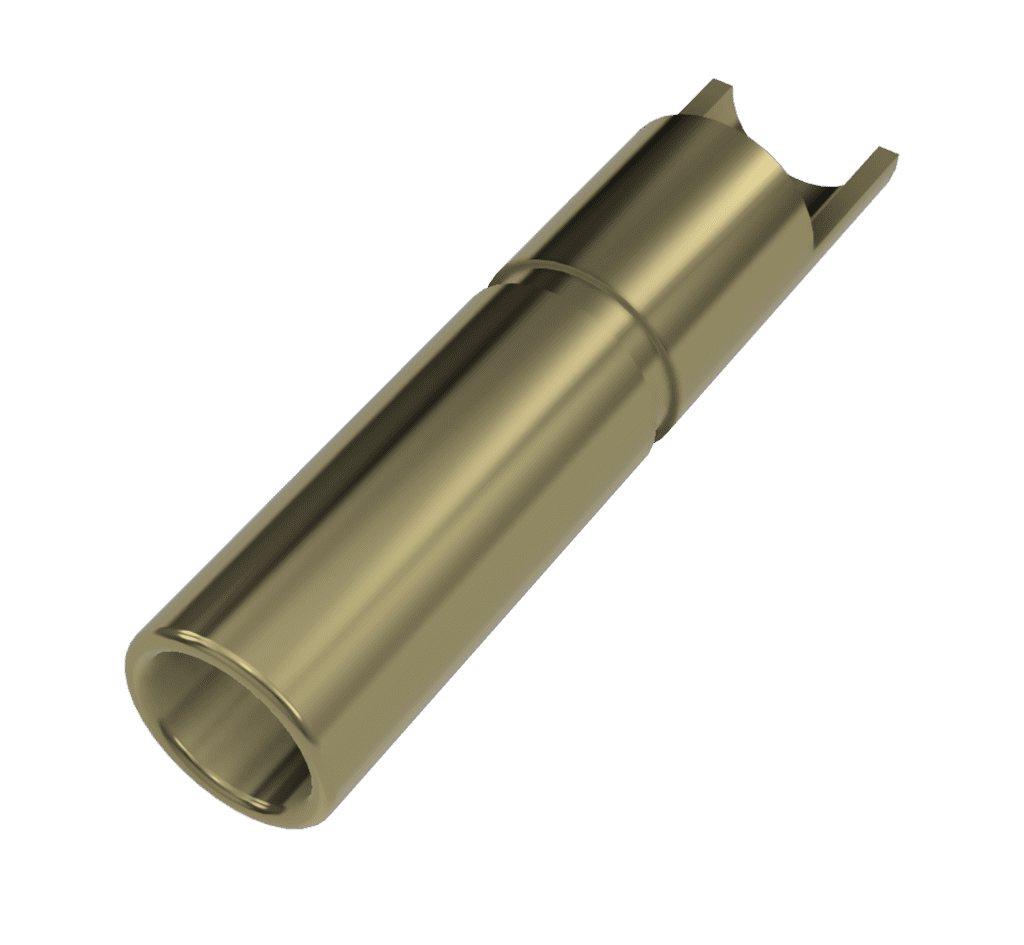
배터리 하우징에는 배터리에 결선된 XT90 암컷 단자가 하우징 내부에 정확히 위치하고 고정될 수 있도록 전용 소켓을 설계했습니다.
설계한 소켓은 배터리 하우징에 결착한 뒤, 배터리에 결선하고 볼팅 방식으로 고정했습니다.
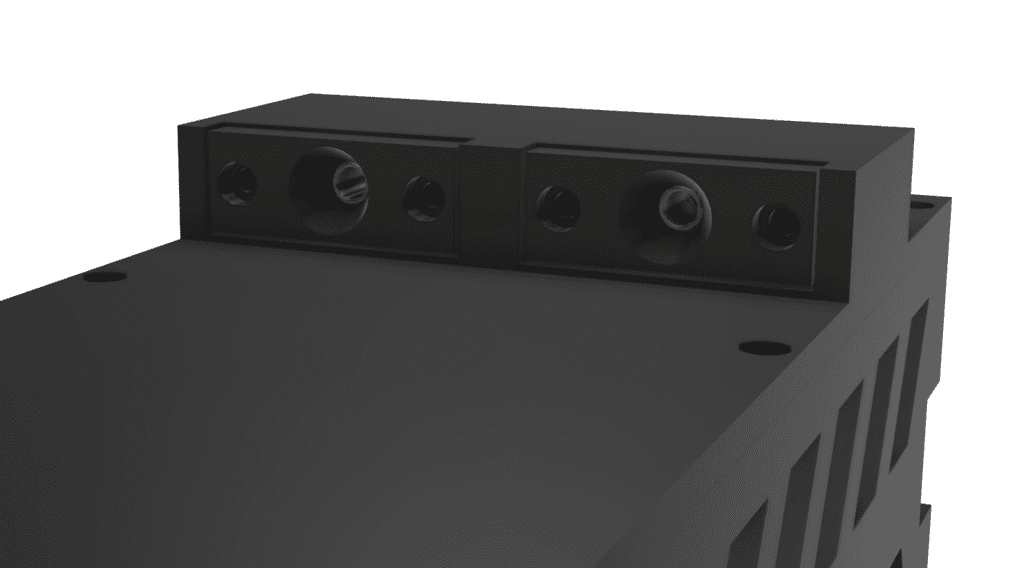
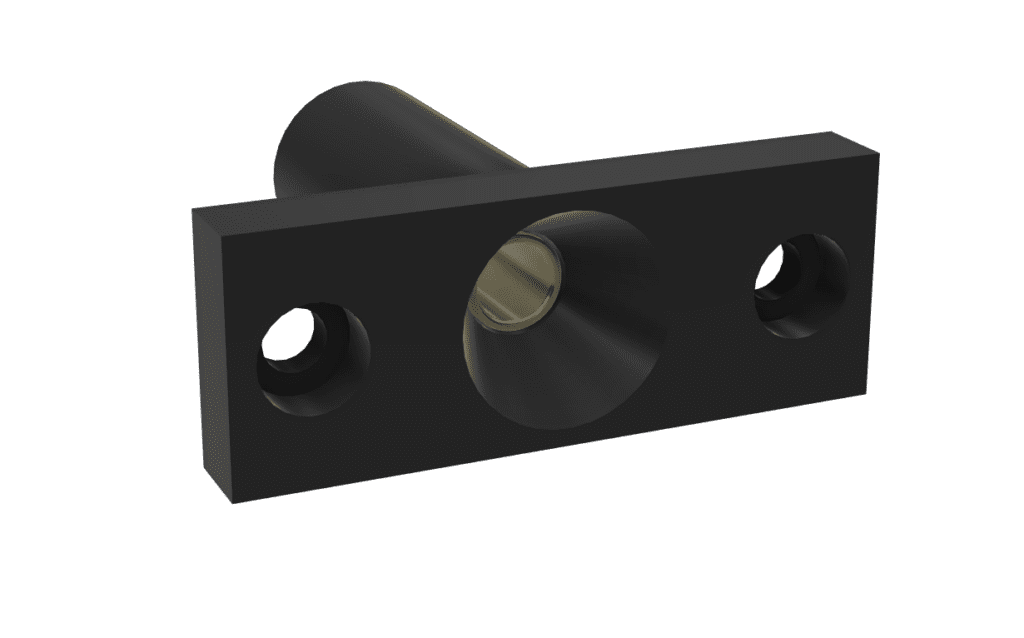
드론 하우징에도 마찬가지로 XT90 수컷 단자가 정확한 위치에 고정될 수 있도록 전용 소켓을 설계했습니다.
설계한 소켓은 드론 하우징에 볼팅 방식으로 고정한 뒤, 드론의 파워모듈에 연결됩니다.
배터리 하우징을 드론 하우징에 밀어 넣으면 암수 단자가 자동으로 맞물리며 전원이 공급됩니다. 반대로 빼내면 단자가 분리되며 전원도 함께 제거됩니다.
3. 볼팅 위치 설계
일반적인 드론 프레임은 배터리를 밸크로 스트랩으로 고정하는 방식을 기준으로 설계되어 있습니다. 따라서 HTX415 프레임에는 배터리 하우징을 볼팅으로 고정할 수 있는 전용 마운팅 홀이 별도로 마련되어 있지 않았습니다.
이를 해결하기 위해 프레임 조립 시 암대와 알루미늄 인서트를 고정하는 볼트의 끝단 나사산을 활용하는 방식으로 설계했습니다. 배터리를 넣은 배터리 하우징의 무게는 2kg이 넘기 때문에 한 측면당 2개의 볼트로 고정하도록 했으며, 프레임의 4개 모서리에 각각 적용하여 총 8개의 볼트로 드론 하우징을 하판에 고정하는 구조입니다.
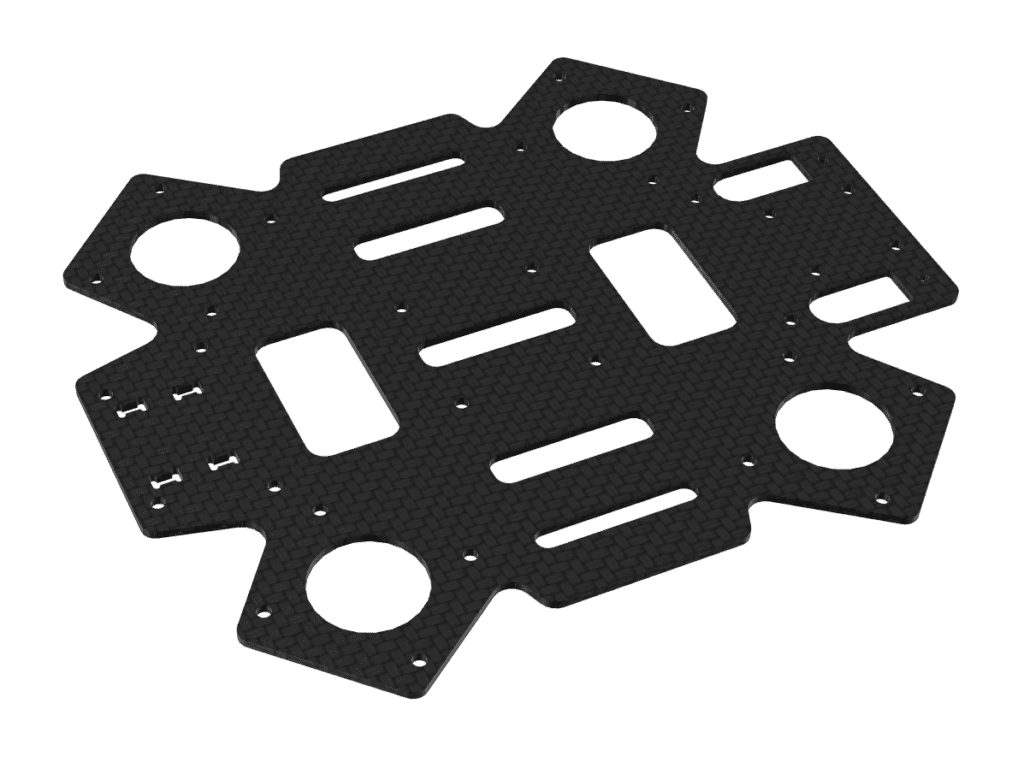
또한 드론 하판 하부에는 기존 구조물로 인해 돌출된 부분이 존재합니다. 드론 하우징이 하판에 밀착될 수 있도록, 해당 돌출부와의 간섭을 피하는 구멍을 하우징에 설계하여 구조적 간섭 없이 장착이 가능하도록 했습니다.
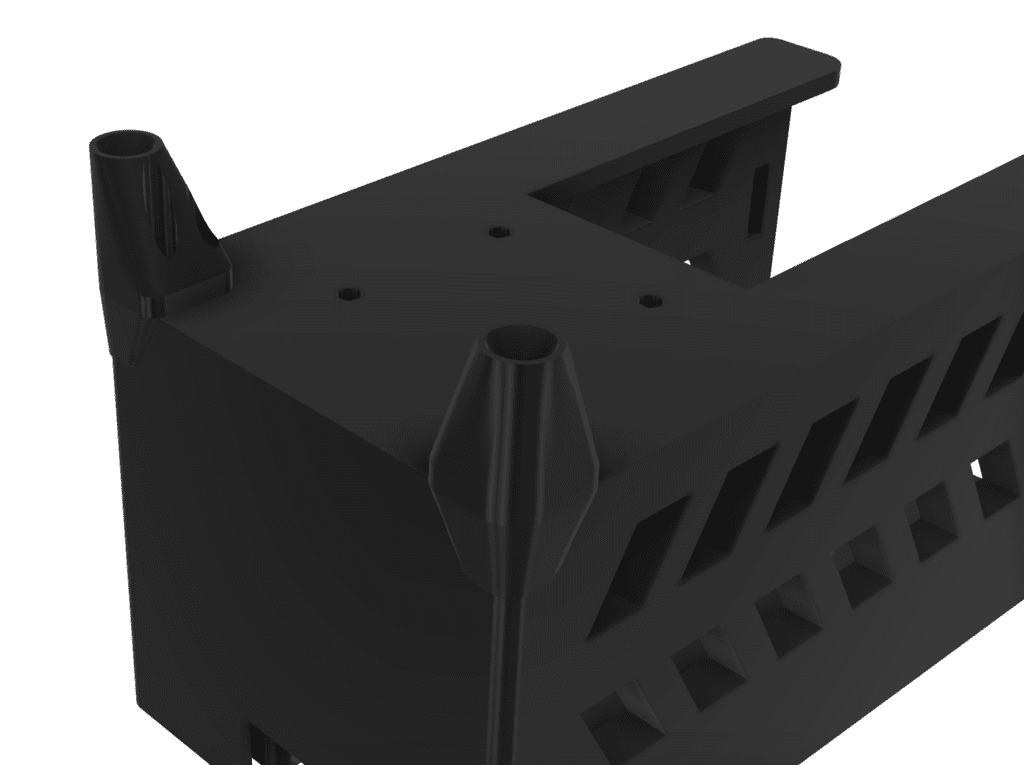
4. 하방 카메라 및 단자 소켓 마운팅 홀
드론 하우징은 드론 하판 하부를 덮는 구조이기 때문에, 하판 하부에 장착되어야 하는 부품들을 위한 별도의 마운팅 홀이 필요했습니다. 드론 하우징에는 두 가지 마운팅 홀을 설계했습니다.
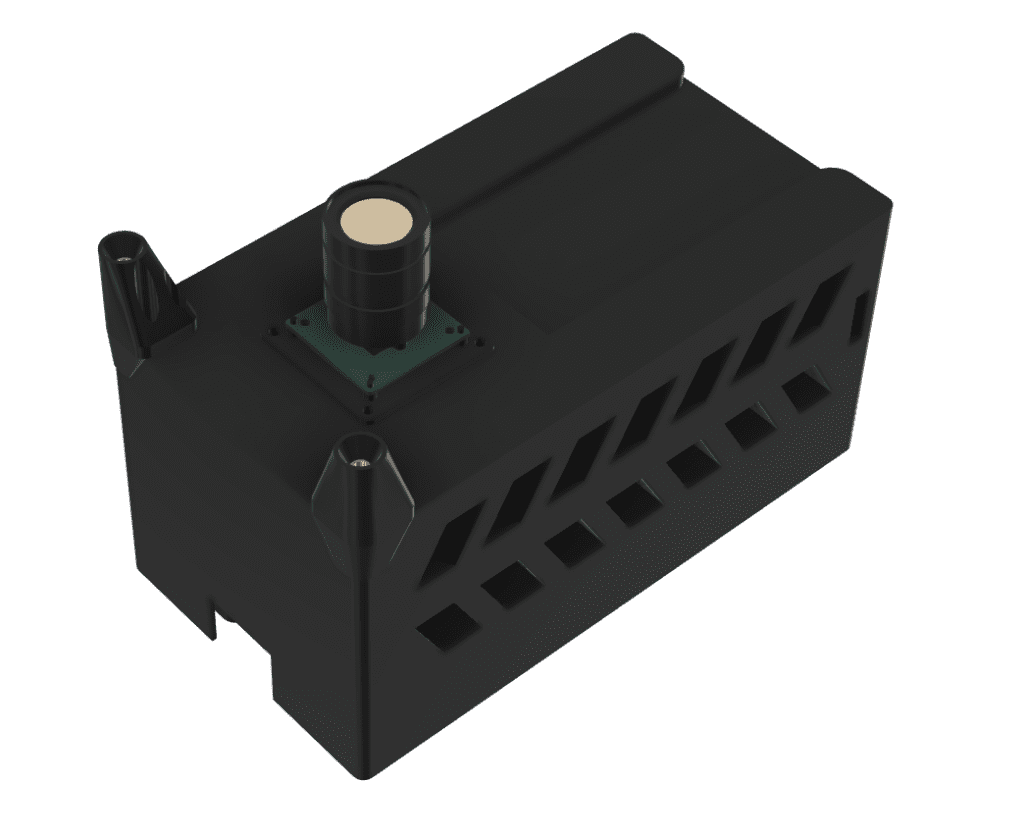
4-1) 하방 카메라 마운팅 홀
911 FALCON은 정밀착륙을 위해 Arducam 12.3MP IMX477 HQ 카메라 모듈을 하방에 장착합니다. 드론 하우징이 하판 하부를 덮는 구조이기 때문에, 카메라가 하방을 향해 시야를 확보할 수 있도록 드론 하우징에 카메라 마운팅 홀을 설계했습니다.
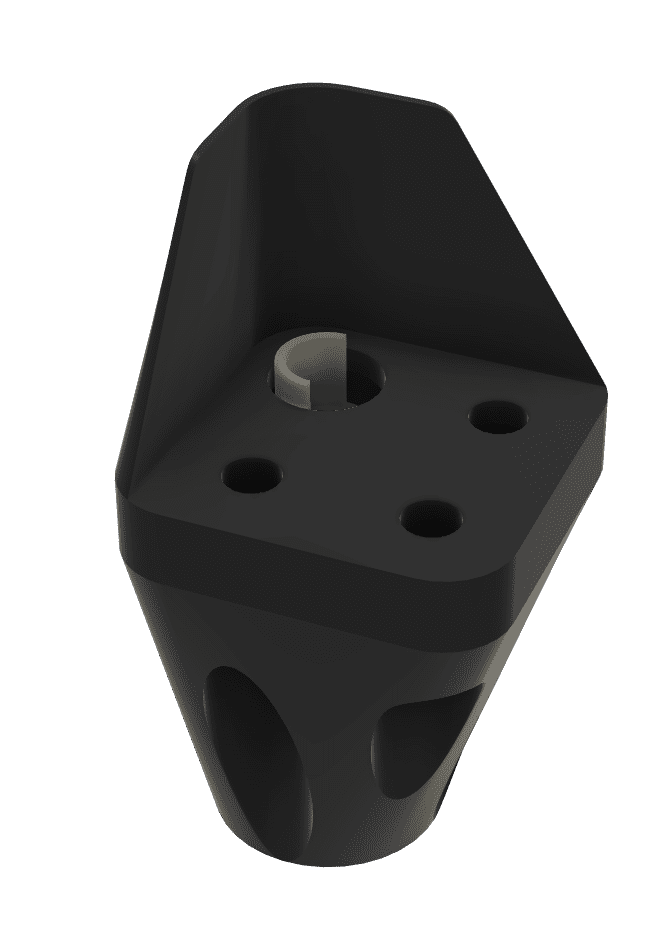
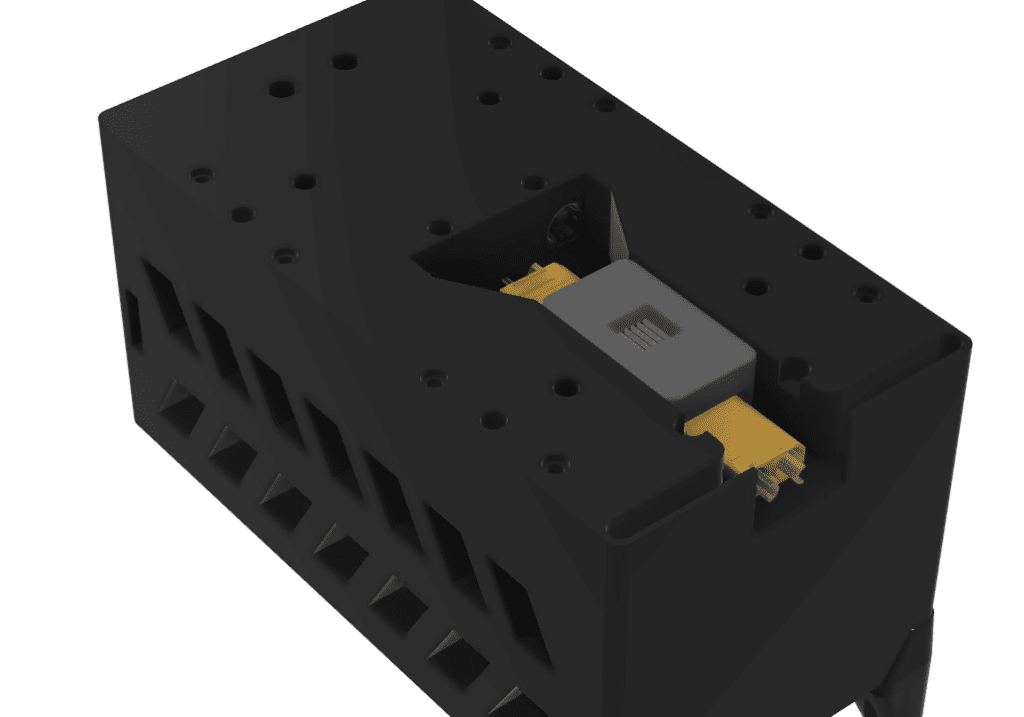
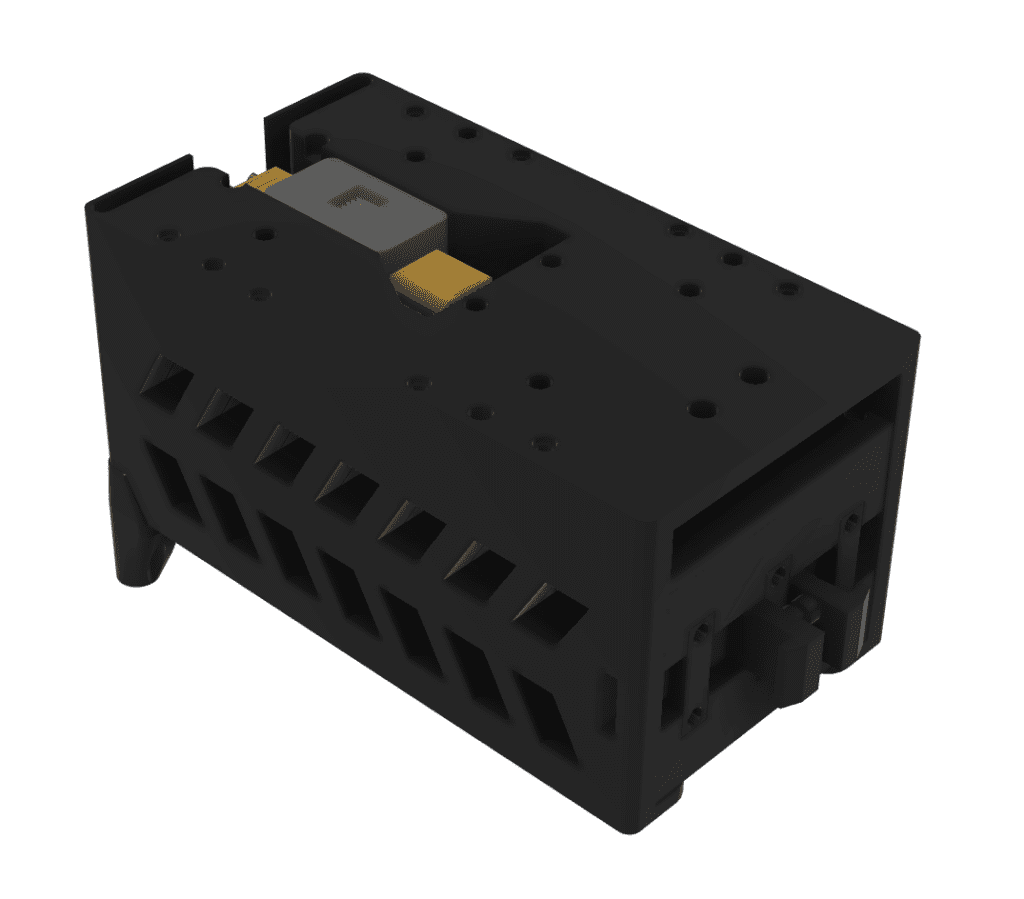
4-2) 핫스왑 단자 소켓 마운팅 홀
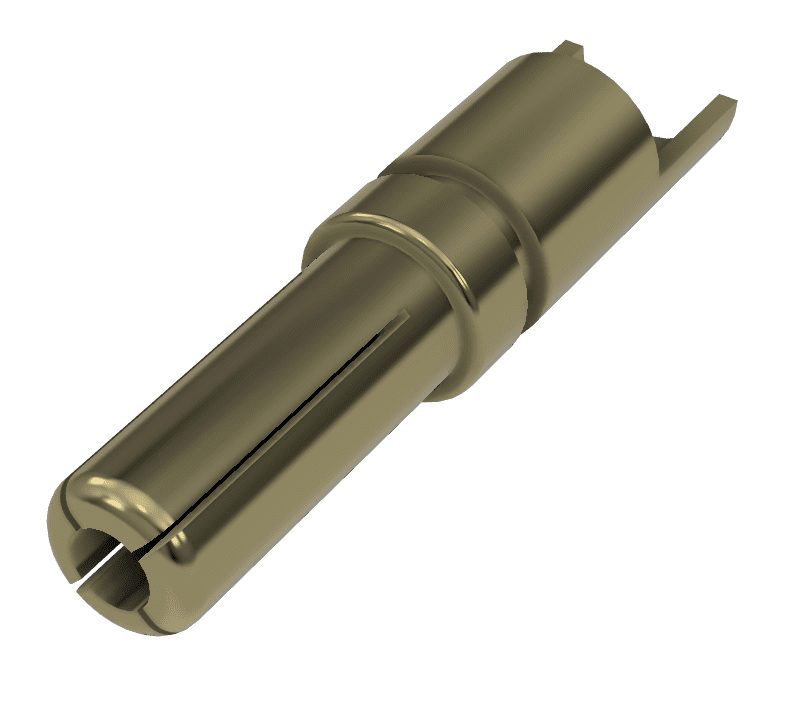
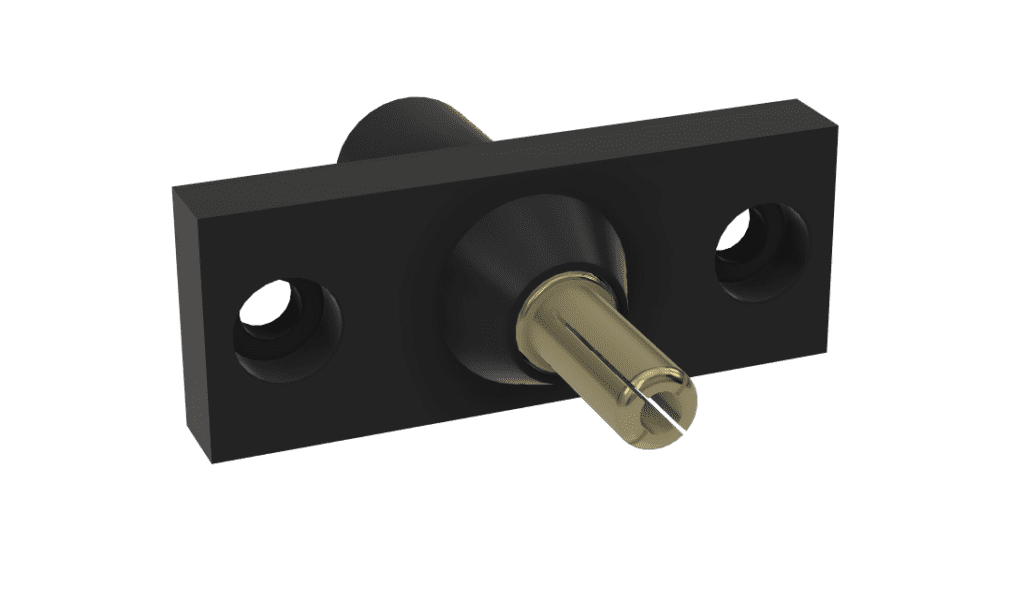
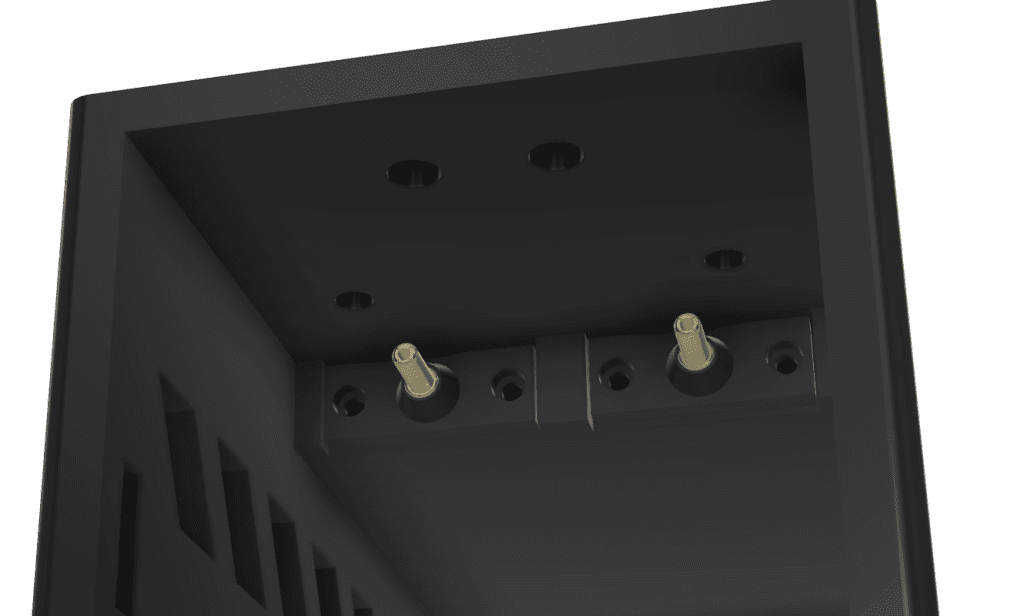
XT90 수컷 단자 소켓이 드론 하우징 내부에 정확히 위치하고 고정될 수 있도록, 소켓 형상에 맞춘 마운팅 홀을 드론 하우징에 설계했습니다. 아래는 드론 하우징에 볼팅되는 핫스왑 단자 소켓입니다.
이 단자 소켓은 드론 하우징의 마운팅 홀에 맞춰 볼팅 방식으로 고정되며, 배터리 하우징이 슬라이드로 결착될 때 암수 단자가 정확히 맞물릴 수 있는 위치에 장착됩니다.
5. 락킹 시스템
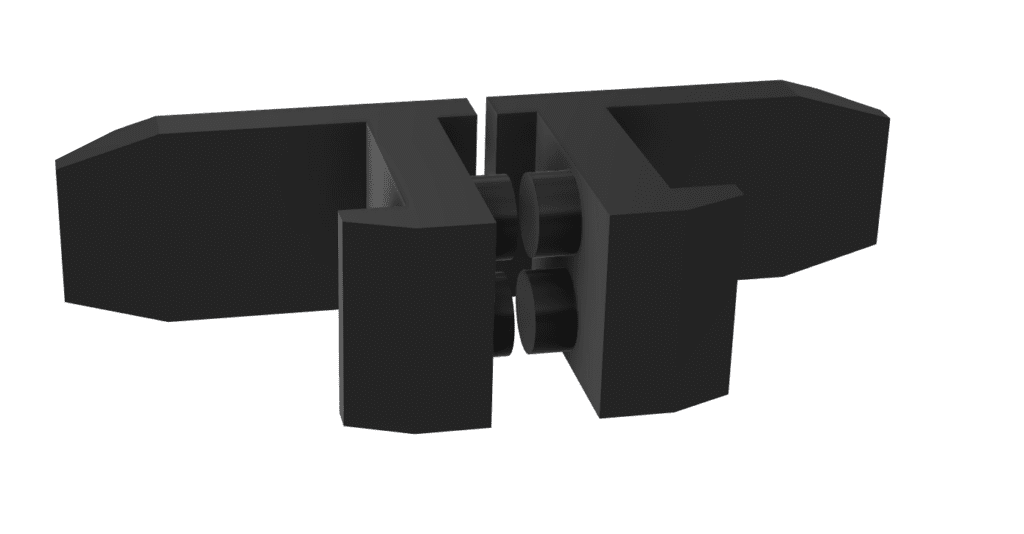
드론 비행 중 관성이나 진동으로 인해 배터리 결착이 느슨해지거나, 심한 경우 분리될 위험이 있습니다. 이를 방지하기 위해 푸셔 스프링 방식의 락킹 시스템을 설계했습니다.
5-1) 구조
배터리 하우징 좌우에 걸쇠를 배치하고, 두 걸쇠는 중앙의 압축 스프링으로 연결됩니다. 평상시 압축 스프링은 두 걸쇠를 서로 밀어내는 방향으로 작용하여, 걸쇠가 배터리 하우징 외곽으로 돌출된 상태를 유지합니다.
5-2) 결착 과정
- 걸쇠를 양손으로 누르면 스프링이 압축되며 걸쇠가 하우징 내측으로 들어옵니다.
- 이 상태에서 배터리 하우징을 드론 하우징에 슬라이드로 밀어 넣습니다.
- 결착 완료 후 걸쇠를 놓으면 스프링이 펴지며 걸쇠가 외측으로 벌어집니다.
- 드론 하우징에 설계된 홈에 걸쇠가 걸리며 락킹이 완료됩니다.
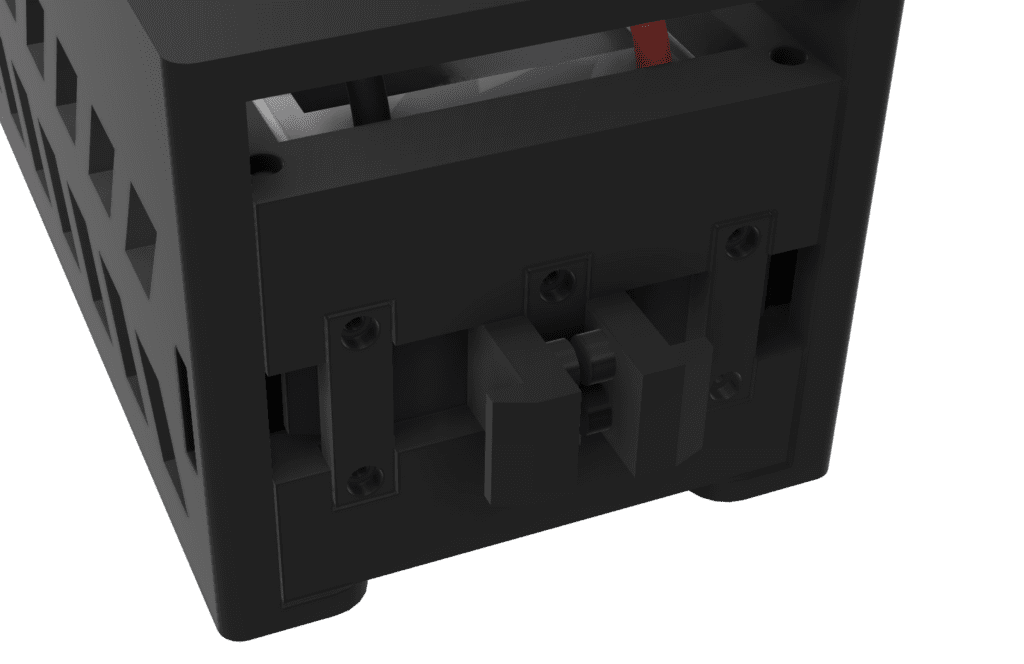
이 구조를 통해 비행 중 관성이나 진동이 발생하더라도 배터리 하우징이 드론 하우징에서 분리되지 않도록 안정적으로 고정됩니다.
6. 아이디얼 다이오드
6-1) 문제 상황
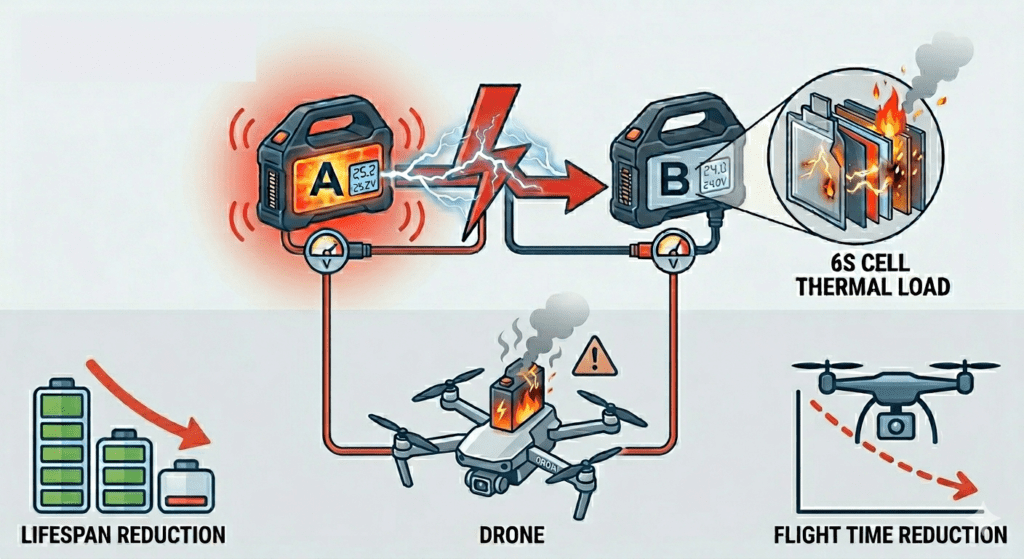
911 FALCON의 핫스왑 시스템은 드론이 착륙하면 스테이션의 전원 접점이 드론 하우징 단자에 결착되며, 스테이션 배터리가 드론에 전원을 공급하는 방식으로 동작합니다. 이 상태에서 드론의 기존 배터리를 제거하기 전까지 스테이션 배터리와 드론 배터리가 병렬로 연결되는 구간이 발생합니다.
리튬 배터리를 병렬로 연결할 때, 두 배터리 사이에 전위차가 존재하면 전압이 높은 쪽에서 낮은 쪽으로 순간적으로 대전류가 유입됩니다. 이는 배터리 셀에 급격한 열 부하를 가하며, 이러한 급속 방전이 반복될 경우 배터리 수명을 최대 30%까지 저하시킬 수 있습니다. 또한 보호회로 없이 전위차가 있는 두 배터리가 병렬 연결되면, 높은 전압의 배터리 전류가 낮은 전압의 배터리를 강제로 충전하게 되어 과전류, 과열, 심각한 경우 배터리 폭발로 이어질 수 있습니다.
6-2) 해결 방법 — 아이디얼 다이오드 적용
이를 방지하기 위해 드론 하우징과 스테이션의 배터리 결착 하우징 양측에 아이디얼 다이오드(Ideal Diode) 를 적용했습니다.

아이디얼 다이오드는 배터리에서 외부 방향으로만 전류를 흘리고, 외부에서 배터리 방향으로 유입되는 전류는 차단합니다. 이를 통해 두 배터리가 동시에 연결된 상태에서도 전위차로 인한 역전류 흐름을 방지하여 배터리를 안전하게 보호할 수 있습니다.
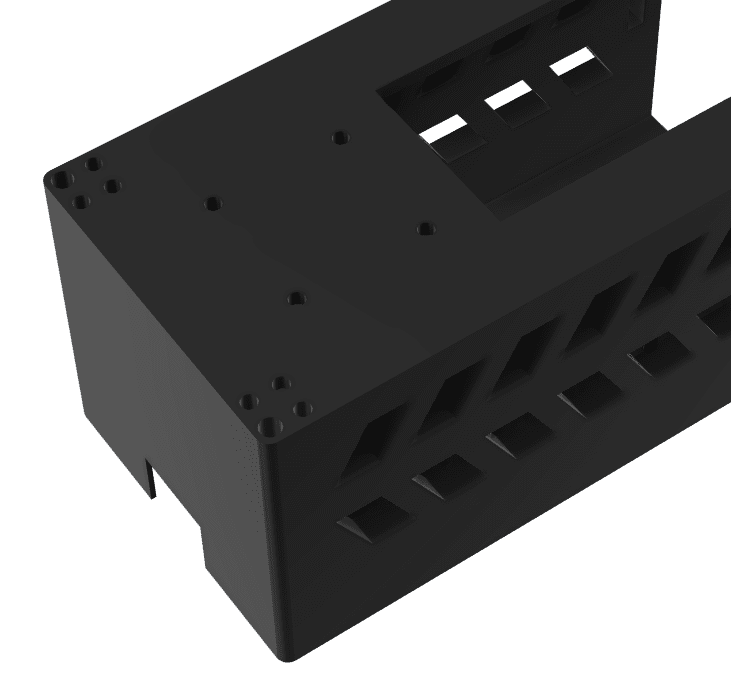
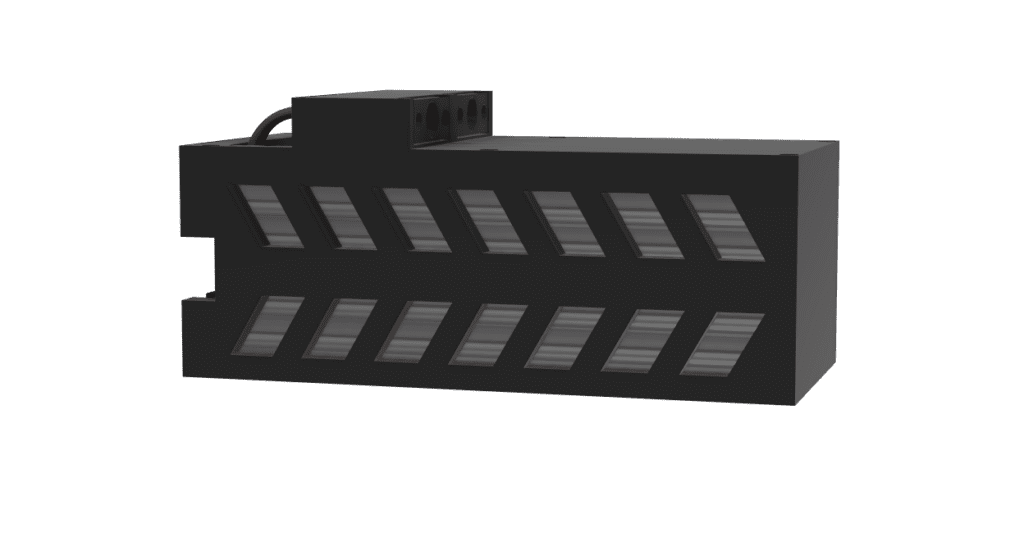
7. 배터리 방열 홀
배터리는 비행 중 지속적으로 대전류를 방출하며 발열이 발생합니다. 배터리 하우징이 배터리를 감싸는 구조이기 때문에, 방열 처리 없이는 하우징 내부에 열이 축적될 우려가 있었습니다.
이를 해결하기 위해 배터리 하우징과 드론 하우징 양측에 방열 홀을 설계했습니다. 배터리 하우징이 드론 하우징에 완전히 결착되었을 때 두 하우징의 방열 홀이 정렬되도록 위치를 설계하여, 비행 중 공기 흐름이 홀을 통과하며 배터리 발열을 자연스럽게 방열할 수 있도록 했습니다.

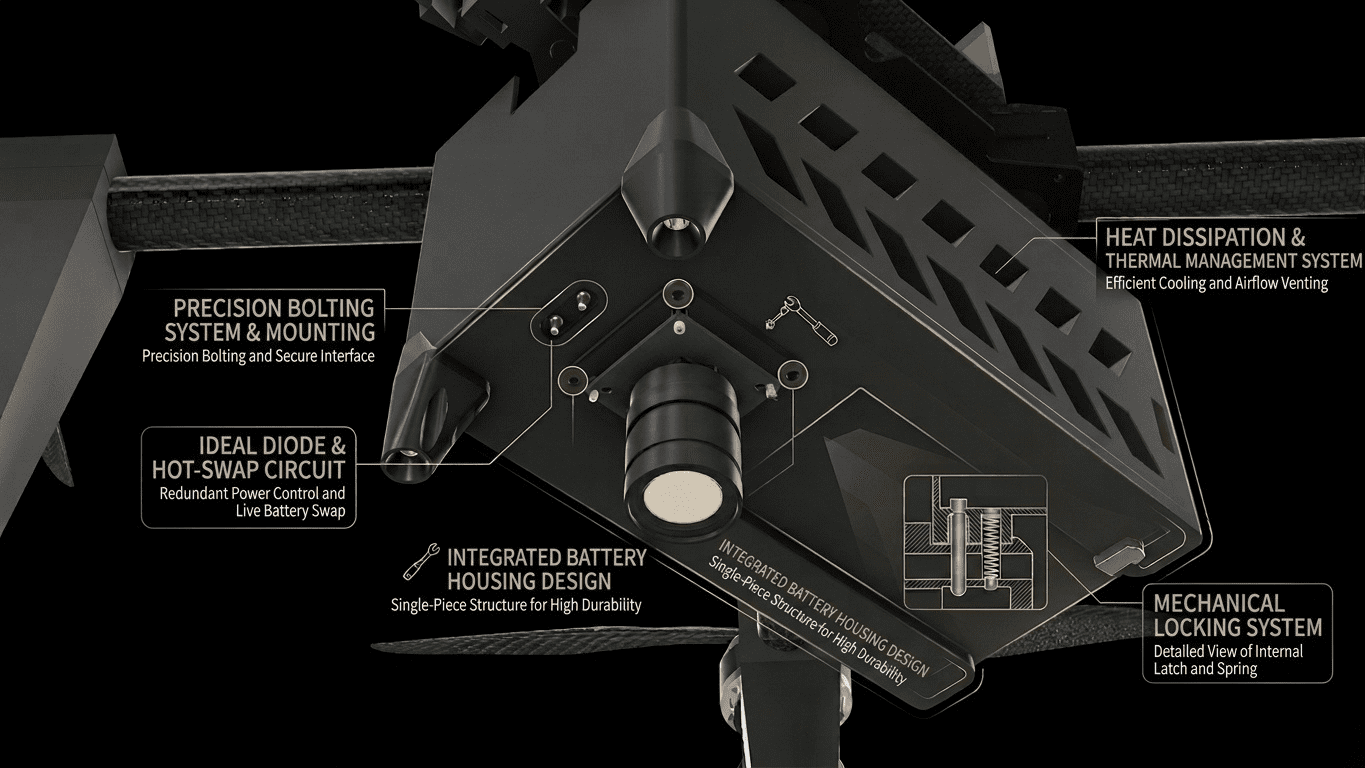
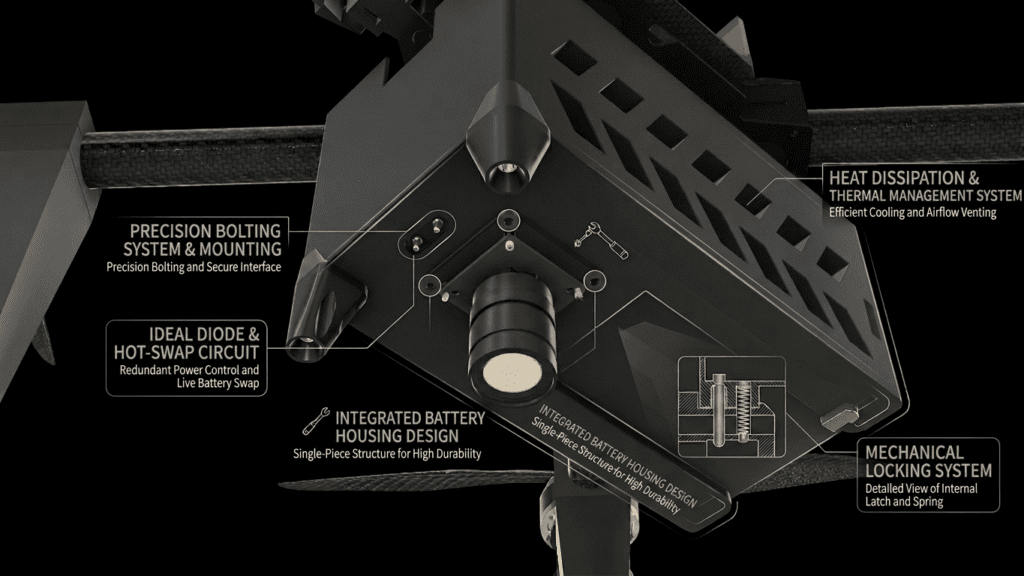
8. 구조 요약
이번 편에서 설계한 배터리 하우징의 전체 구성을 정리한 것입니다.
911 FALCON 드론은 드론 하우징이 드론 하판 하부에 마운팅됩니다. 배터리 하우징은 슬라이드 방식으로 드론 하우징에 결속되며, 락킹 시스템을 통해 비행 중 배터리가 분리되지 않도록 고정됩니다. 드론 하우징 하방에는 정밀착륙용 카메라와 핫스왑 단자 소켓이 함께 마운팅됩니다.
이번 글에서는 911 FALCON 드론의 배터리 하우징 설계 과정을 정리했습니다. XT90 접점 설계, 볼팅 구조, 락킹 시스템, 아이디얼 다이오드, 방열 홀까지, 핫스왑 운용에 필요한 요소들을 하우징 설계 단계에서 함께 반영했습니다.
특히 리니어 액추에이터의 X축 단일 방향 움직임만으로 배터리의 삽입과 제거가 이루어지는 구조에 맞춰, 슬라이드 결착 동작만으로 전원 접점이 자동으로 맞물리고, 락킹으로 고정되며, 방열까지 함께 이루어지는 방식으로 전체 하우징 구조를 구성했습니다.
다음 2주간은 연재를 잠시 쉬어가도록 하겠습니다. 이후에도 911 FALCON 프로젝트의 제작 과정을 꾸준히 이어서 정리해 보겠습니다. 감사합니다.

작성자: 이근찬, 쿼드(QUAD) 드론연구소 선임연구원
기고일: 2026.04.14
![[하이브리드 항법 시스템: 제6편] [구현-2단계] 중간 보정 단계: OpenCV/YOLO 지형지물 대조 및 Digital Twin 테스트](https://quad-drone-lab.co.kr/wp-content/uploads/2026/06/Absolute_Visual_Localization_for_UAVs-768x429.jpg)
![[하이브리드 항법 시스템: 제2편] PX4 자율 항법의 원리와 Gazebo SITL 시뮬레이터 세팅](https://quad-drone-lab.co.kr/wp-content/uploads/2026/04/PX4EKF2-Architecture-768x429.jpg)
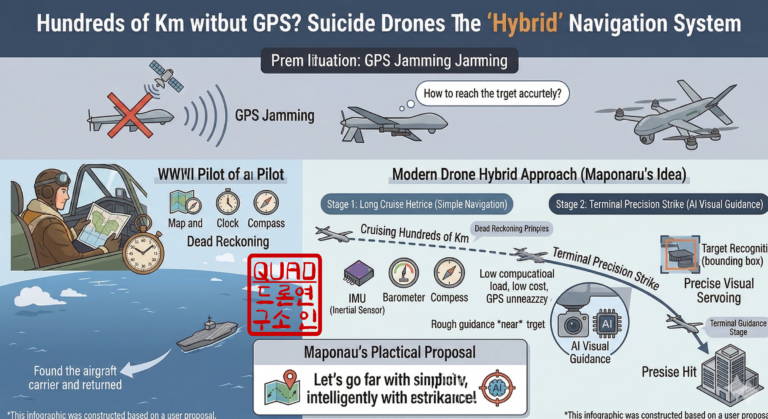
![[하이브리드 항법 시스템 제1편: 개요] GPS 없이 수백 km를 날아간다? 2차대전 조종사에게 배우는 하이브리드 항법 시스템](https://quad-drone-lab.co.kr/wp-content/uploads/2026/04/컴패니언-컴퓨터-기반의-AI-지형지물-보정-768x419.jpg)