
Battery Swap Station – Swap Mechanism and Requirements : 911 FALCON Project
Hello, this is QUAD Drone Laboratory.
I’m Geunchan Lee, Senior Researcher at QUAD Drone Lab.
In the previous articles, we organized the airframe design of the 911 FALCON drone, reviewed the placement directions of the main components, and covered the design of the dedicated mounts required for actual integration into the frame. In this article, we will focus on one of the key features of the 911 FALCON system: the battery swap system.
The 911 FALCON is intended to perform repeated search and relief missions in disaster environments. Therefore, the system should not simply complete a single flight and stop. Instead, after the drone finishes one mission, it should be able to return to the station, exchange its battery, and then take off again to continue the next mission.
To achieve this, we planned a battery swap station mounted on an autonomous ground vehicle, with a structure that can automatically replace the battery after the drone lands. In this article, we will organize the basic idea, overall structure, operating sequence, and design requirements of this battery swap system.
1. Overview of the Battery Swap System
1-1) Why a Battery Swap System Is Needed
In conventional drone operations, when the battery level becomes low, the aircraft is recovered, the battery is manually replaced, and the drone is launched again. However, for the disaster-response mission profile targeted by the 911 FALCON, this approach has limitations in terms of continuous operation.
In particular, when wide areas must be repeatedly searched or when relief delivery and return flights must be performed continuously, the battery replacement process also needs to be automated as part of the overall mission flow. Therefore, this project aims for a structure in which the drone can land precisely on the station, have its battery replaced automatically without manual intervention, and then continue its mission.
1-2) Basic Structure
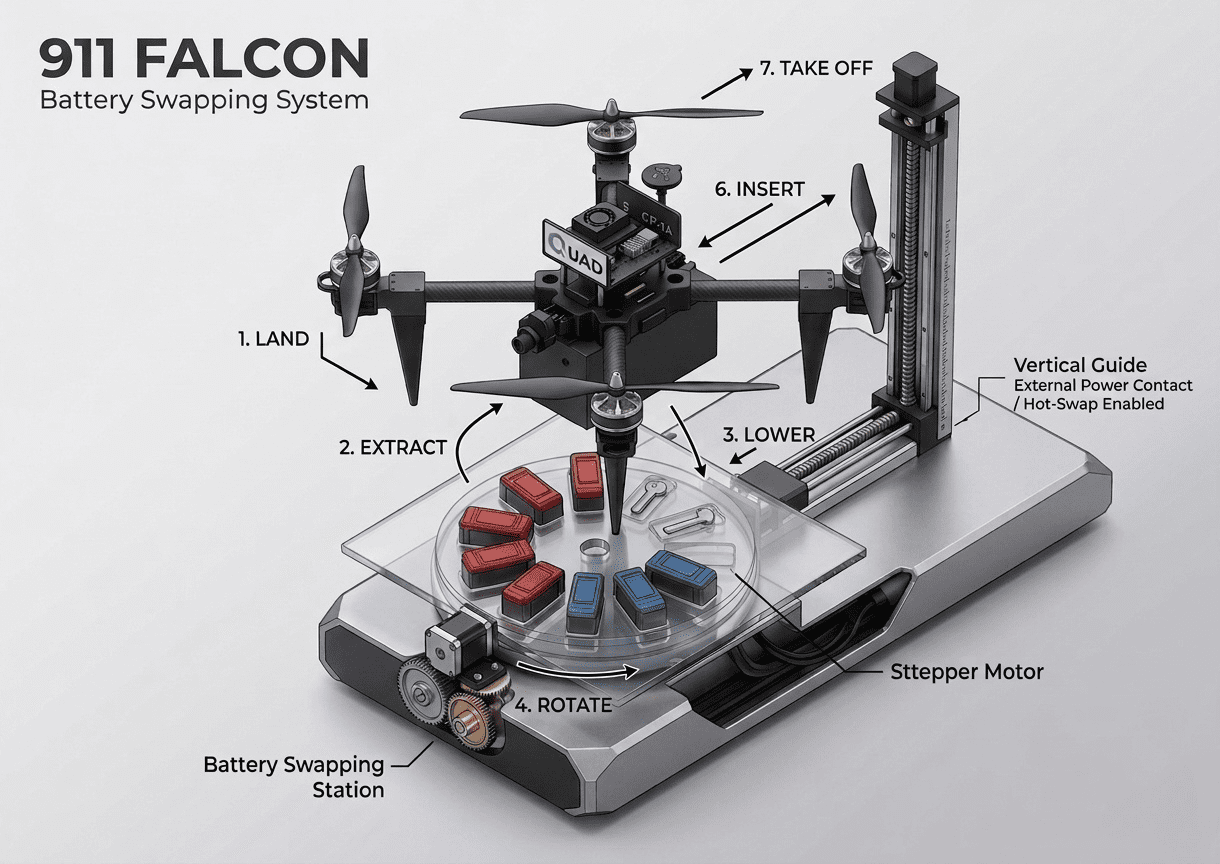
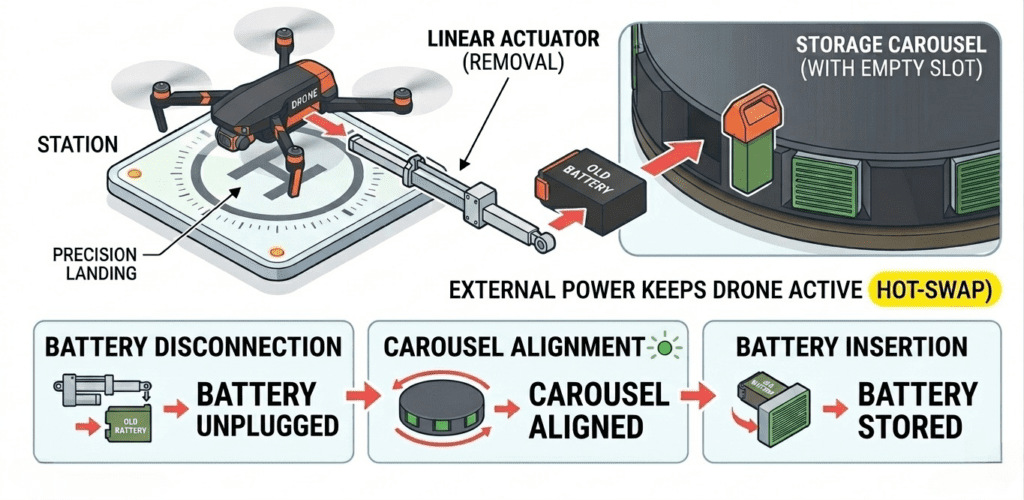
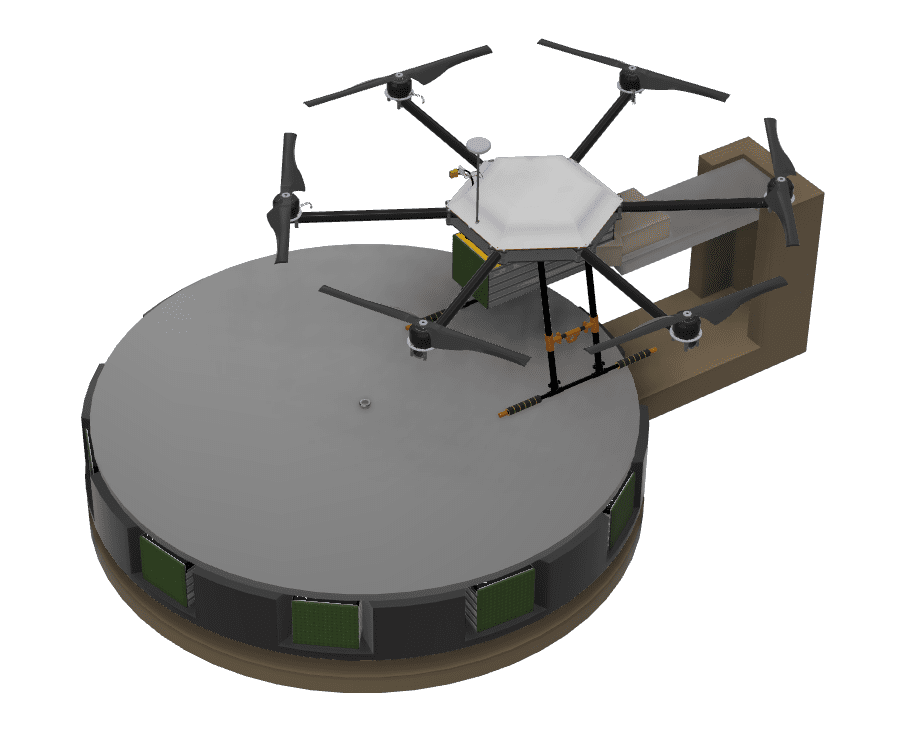
The battery swap system of the 911 FALCON is based on a battery swap station mounted on an autonomous ground vehicle. Once the drone completes precision landing, the station initiates the battery replacement sequence.
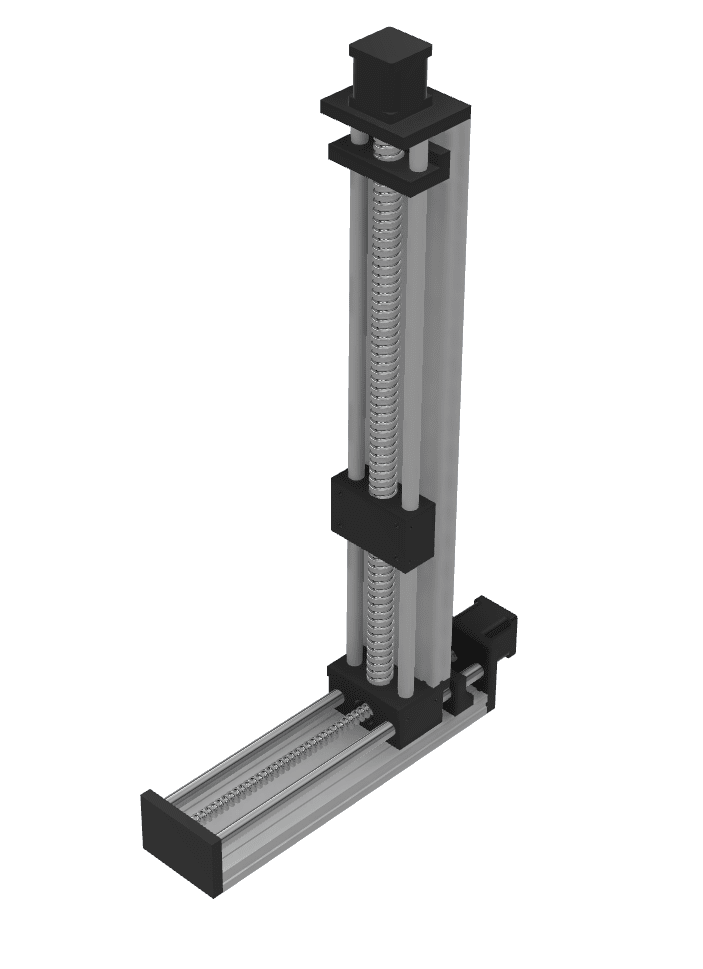
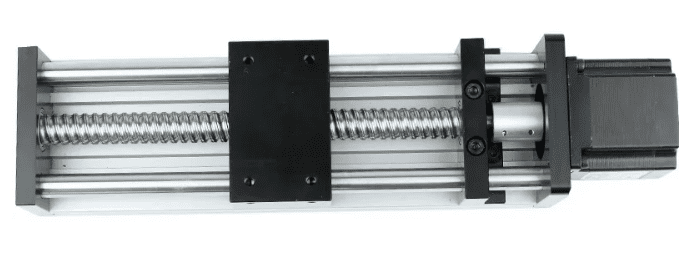
The battery removal and insertion process is planned to be carried out using two linear actuators, one for the X-axis and one for the Z-axis. The X-axis linear actuator is responsible for pulling the battery out of the drone and inserting a new one, while the Z-axis linear actuator is responsible for vertical movement to align the battery replacement position.
In other words, one axis is responsible for battery extraction and insertion, while the other is responsible for vertical alignment.
1-3) Carousel Structure
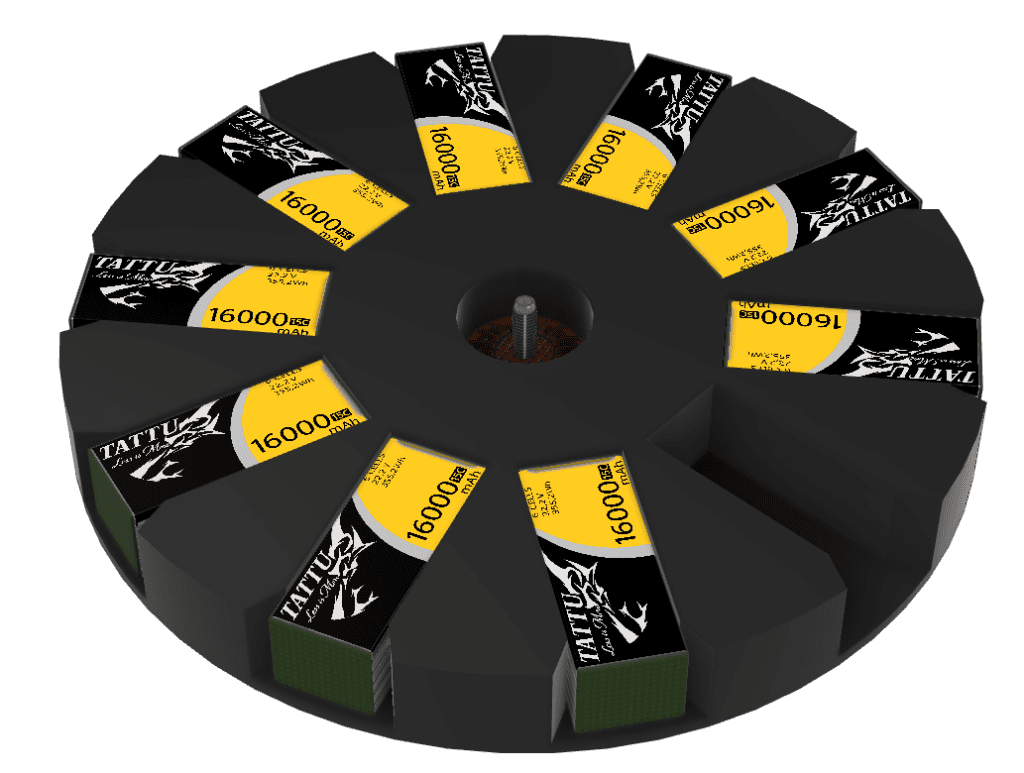
To store multiple batteries and supply them sequentially, a carousel-type rotating disk structure was adopted in the lower section of the station. This structure is designed to include nine battery slots and one empty slot, so that a used battery can be placed into the empty slot and a fresh battery can later be brought into the replacement position.
The carousel structure is arranged so that the drone lands on the upper platform, the rear linear actuator performs battery extraction and insertion, and the lower rotating carousel aligns battery positions sequentially. A step motor is placed at the center of the lower part of the station, and this step motor rotates the carousel so that the linear actuator can align with a specific battery slot.
In other words, the linear actuator does not move around to find every battery position directly. Instead, the carousel rotates to bring either the required battery slot or the empty slot into alignment with the actuator position.
https://www.youtube.com/watch?v=keBgvnn4wIA
2. Battery Replacement Sequence
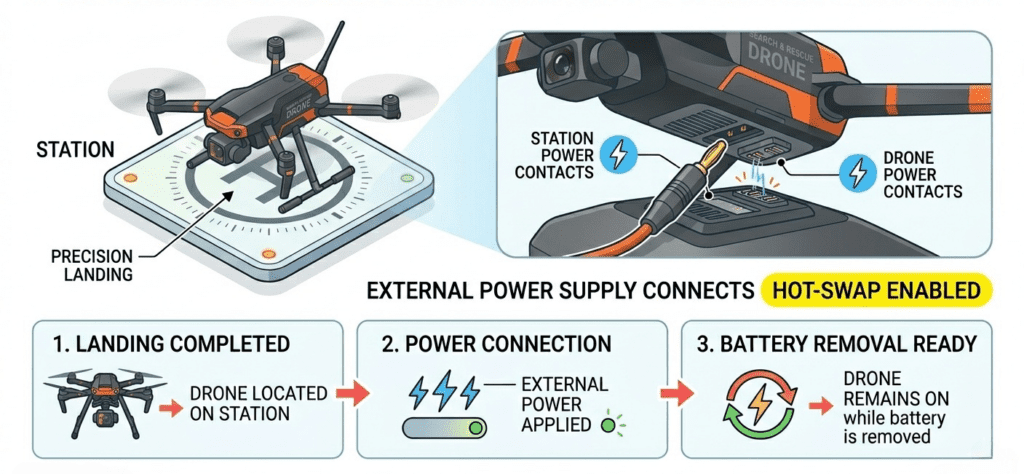
2-1) Precision Landing and External Power Connection
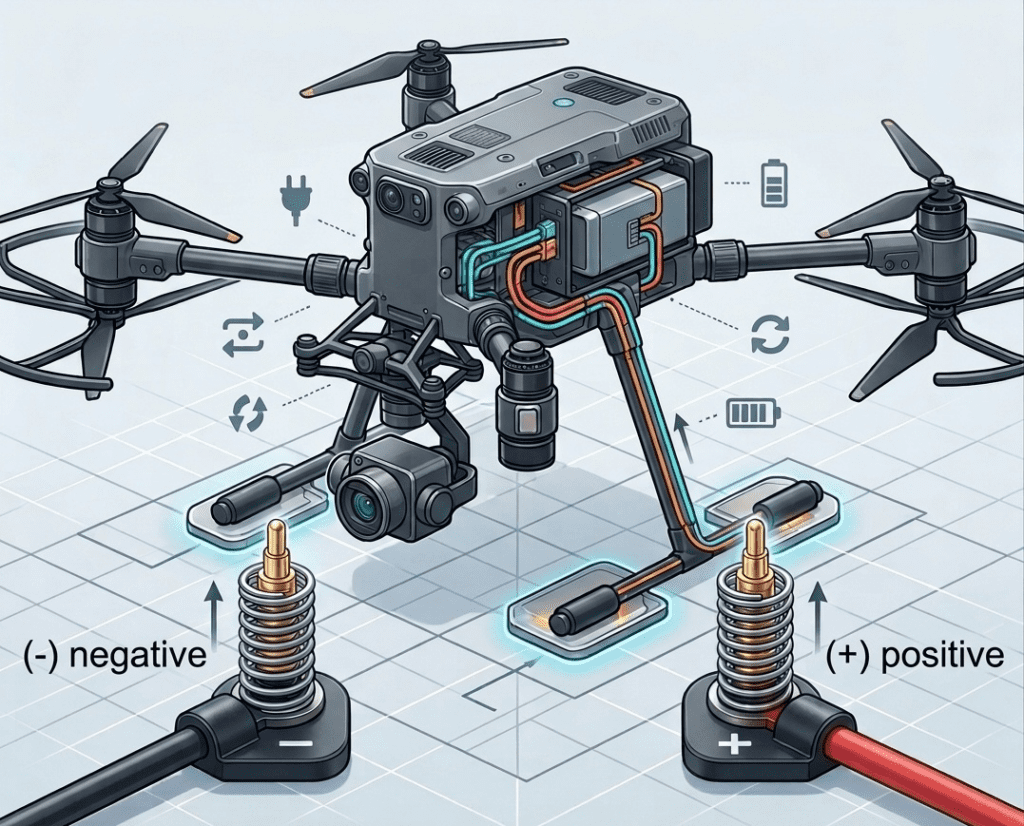
The battery replacement process begins after the drone completes precision landing on the station. First, the power contacts located at the top of the station connect to the drone and supply external power.
This step is required to prevent the drone from losing power while the battery is being removed, and it is the key condition that makes hot-swap possible throughout the battery replacement process.
2-2) Removal of the Used Battery and Alignment of the Empty Slot
After external power is connected, the linear actuator removes the battery from the drone. Then the step motor rotates the carousel until the empty slot is aligned with the linear actuator.
Once aligned, the removed battery is inserted into the empty slot of the carousel. In other words, the used battery is first transferred into the empty slot for temporary storage.
2-3) Alignment of the New Battery and Installation
After the used battery is placed into the empty slot, the carousel is rotated again so that the slot containing a new battery is aligned with the linear actuator.
The linear actuator then extracts the new battery from that slot, transfers it toward the drone, and inserts it into the airframe. Once the replacement is complete, the drone can take off again and continue the remaining mission.
2-4) Summary of the Entire Sequence
As a result, the overall process operates in the following order:
landing → external power connection → removal of the used battery → alignment of the empty slot and insertion of the removed battery → alignment of the fresh battery slot → installation of the new battery → takeoff again
3. Adopted Method and Design Requirements
3-1) Power Retention Condition
The most important point in this battery swap system was that it should not simply store batteries. Instead, the drone had to be able to perform the replacement process while remaining in a hot-swappable powered state.
For this reason, the upper power contacts of the station had to provide stable electrical power to the drone even while the battery was removed. Without this condition, the aircraft would lose power during battery separation, and the entire swap sequence would fail.
3-2) Why Linear Actuators Were Chosen
The battery had to be moved accurately in a straight line, so a linear actuator-based method was considered more suitable than a rotating linkage mechanism.
In particular, the roles were separated so that the X-axis handles battery extraction and insertion, while the Z-axis handles vertical position alignment. This made it possible to keep the structure relatively simple while clearly separating the required motions.
3-3) Why the Carousel Structure Was Chosen
The battery storage structure had to keep multiple batteries in a limited space while also placing used batteries and fresh batteries into the replacement position in sequence. At the same time, an important condition in this project was to keep the battery swap mechanism simple enough to operate with only two linear actuators.
For this reason, a carousel structure was adopted, with nine battery slots and one empty slot, so that used batteries could be stored and fresh batteries could be supplied in sequence. By contrast, if the batteries were stored in a grid layout, an additional Y-axis linear actuator would be required for position alignment, which would make the overall structure more complex.
Therefore, considering that this system is intended for a search drone operating repeatedly in disaster environments, we concluded that a carousel structure, which enables battery replacement with only X-axis and Z-axis actuators, was more suitable.
3-4) Summary of the Main Design Requirements
As a result, the key requirements of this system can be summarized as follows:
- The battery replacement sequence must start automatically after precision landing
- The drone must remain powered so that hot-swap is possible during battery replacement
- The battery must be removed and inserted stably in a straight-line direction
- Multiple batteries must be stored and supplied sequentially
- The carousel must be able to accurately align both the empty slot and battery slots with the actuator position
- After replacement is completed, the drone must be able to take off again and continue the mission
In this article, we organized the basic idea, overall structure, and operating sequence of the battery swap system planned for the 911 FALCON system. This system is based on a station mounted on an autonomous ground vehicle, and aims to automatically replace the drone battery using X-axis and Z-axis linear actuators, a carousel structure, and a step motor.
In particular, after the drone completes precision landing on the station, the aircraft remains powered in a hot-swappable condition through the upper power contacts while the used battery is removed. Then the carousel rotates to align the empty slot and the fresh battery slot in sequence, and the new battery is inserted into the drone.
In the next article, we will continue with the battery handling process and the design and fabrication of the battery housing, based on the battery swap mechanism and design requirements organized in this article. Thank you.

Author: Guenchan lee, Senior Researcher of QUAD Drone Lab.
Date: April 08, 2026
![[PX4 Tuning Series Appendix] Racing Drone Tuning Guide (Racer Setup): Unlocking Extreme Performance](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Racing-Drone-Minimalism-and-Balance-768x429.png)

![[하이브리드 항법 시스템: 특별편] GPS 교란을 버텨라! PX4 Dead-Reckoning (추측 항법) 모드 완벽 가이드](https://quad-drone-lab.co.kr/wp-content/uploads/2026/05/Resilient_Drone_Dead-Reckoning_Navigation-768x429.jpg)