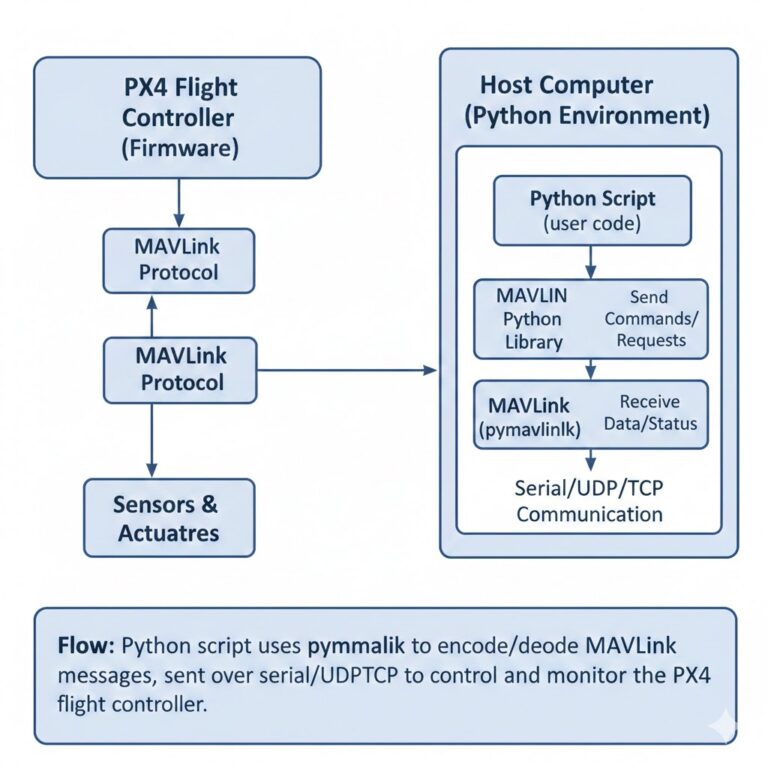
PX4 MAVLink-Python Programming : 3. Connecting to the drone
Hello! This is Aiden from the Marketing Team. Today, I would like to introduce PX4 MAVLink-Python programming, specifically focusing on how to ‘Connect’ to a drone. Please note that this content is copyrighted by QUAD Drone Lab, and we kindly ask that you refrain from unauthorized distribution. Connecting to a drone Overview The mavutil module…