
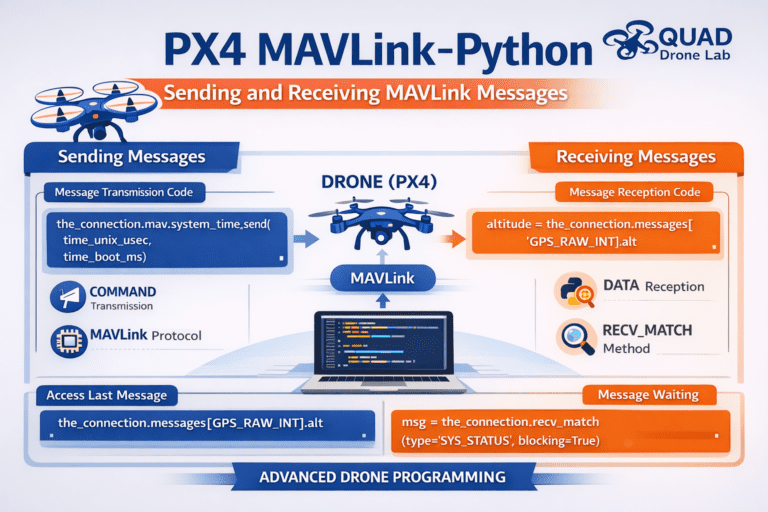
PX4 MAVLink-Python Programming: 4. Sending and Receiving MAVLink Messages
Hello. This is Aiden from the marketing team. Today, I would like to introduce PX4 MAVLink-Python programming, specifically focusing on sending and receiving MAVLink messages. Please note that this content is registered under the copyright of our QUAD Drone Lab, and we kindly ask you to refrain from unauthorized distribution. Sending and Receiving MAVLink Messages…
![[Series Announcement] The Ultimate Guide to PX4 Tuning for Drone Researchers and Students](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/PX4-Multicopter-Optimization-and-Tuning-Guide-768x429.png)
![The Ultimate Guide to MAVSDK-Python Programming [Part 12]: Troubleshooting Guide and Logging Techniques](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Drone-Software-Error-Handling-Comparison-768x429.png)
![The Ultimate Guide to MAVSDK-Python Programming [Part 11]: Creating Manual Drone Control via Keyboard Inputs](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Drone-RC-Stick-Input-Mapping-768x429.png)
![The Ultimate Guide to MAVSDK-Python Programming [Part 10]: Enhancing Target Reaching Efficiency with Feed-Forward Simultaneous Control](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Feed-Forward-Drone-Navigation-Control-Comparison-768x429.png)
![The Ultimate Guide to MAVSDK-Python Programming [Part 9]: OFFBOARD Velocity Control (Based on BODY and NED Frames)](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/image-3-768x543.png)
![The Ultimate Guide to MAVSDK-Python Programming [Part 8]: OFFBOARD Position Control (Based on NED Frame)](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/image-2-768x545.png)
![The Ultimate Guide to MAVSDK-Python Programming [Part 7]: Understanding the Core Principles of OFFBOARD Mode](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Offboard-Drone-Communication-Architecture-768x429.png)
![The Ultimate Guide to MAVSDK-Python Programming [Part 6]: Analyzing MAVSDK-Python Basic Sample Programs](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/image-768x420.png)
![The Ultimate Guide to MAVSDK-Python Programming [Part 5]: Complete Understanding of Python ‘asyncio’ for MAVSDK Control](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/Synchronous-vs-Asynchronous-Drone-Processing-768x429.png)