
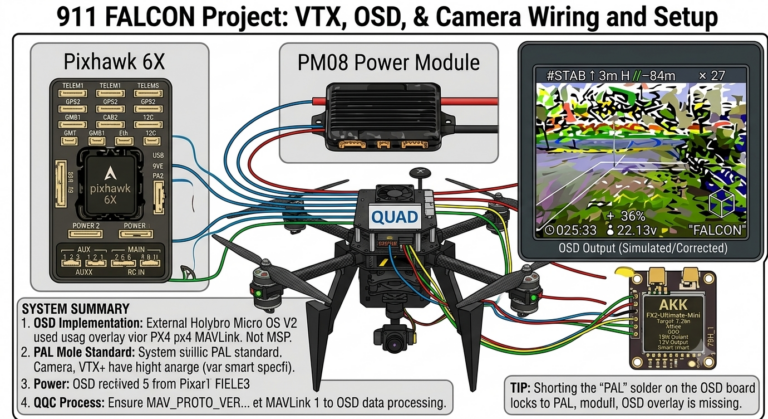
영상송신기·OSD·카메라 배선 및 세팅 : 911 FALCON 프로젝트
안녕하세요, 쿼드(QUAD) 드론연구소의 이근찬 선임연구원입니다. 지난 편에서는 911 FALCON 드론의 모터 및 ESC 배선 과정과 아밍 및 스로틀 동작 확인까지 정리했습니다. 파워모듈에서 PDB를 거쳐 ESC로 이어지는 전원 배선과 모터 결선, FC와의 신호선 연결까지 배선 과정을 순서대로 진행했으며, 모터 방향 설정과 아밍·스로틀 동작 확인을 통해 기체가 조종기의 입력에 정상적으로 반응하는 것까지 확인했습니다. 이번 편에서는 영상송신기·OSD·카메라 배선…
![[Hybrid Navigation System: Part 6] [Implementation-Phase 2] Intermediate Correction: OpenCV/YOLO Terrain Matching and Digital Twin Testing](https://quad-drone-lab.co.kr/wp-content/uploads/2026/06/Absolute_Visual_Localization_for_UAVs-768x429.jpg)
![🎉 [Congratulations] Senior Researcher Geunchan Lee (Leatherneck Dev) Wins the ‘Silver Award’ at Hanyang University’s Creative Comprehensive Design Competition! 🎉](https://quad-drone-lab.co.kr/wp-content/uploads/2026/06/은상수상_20260608_170844072-1-768x1024.jpg)
![[ROS2 Mastery Part 9] Static Frame and Moving Robot TF2 Broadcasting Practice Guide](https://quad-drone-lab.co.kr/wp-content/uploads/2026/06/0605_인포그래픽-768x429.jpg)