
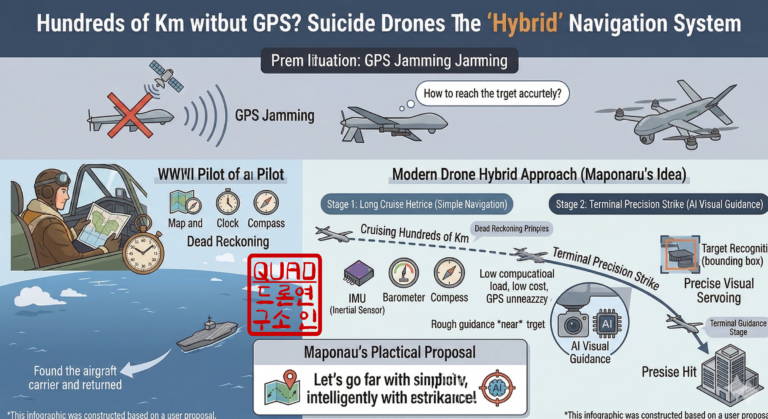
Building a ‘non-GPS Hybrid Unmanned Navigation System’ for Suicide Drones: Ready
Recently, news about “Iranian suicide drones flying hundreds of kilometers to attack a target” has become an almost daily occurrence. Watching these reports, a thought suddenly crossed my mind: “With recent GPS jamming making it difficult to use GPS for navigation, how did they manage to fly to their targets?” This led to another question:…

![ROS2 Mastery [Part 2] Core Communication Concepts of ROS2 and How to Use the Powerful Utility “RQT”](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0331_그림6-768x512.png)

![ROS2 Mastery [Part 1] Complete Guide to ROS2 Jazzy Development Environment and Workspace](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0330_인포그래픽-1-768x429.png)
![[Series Announcement] ROS2 Mastery: A Comprehensive ROS2 Guide for Students and Researchers](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/image-11-768x429.png)
