
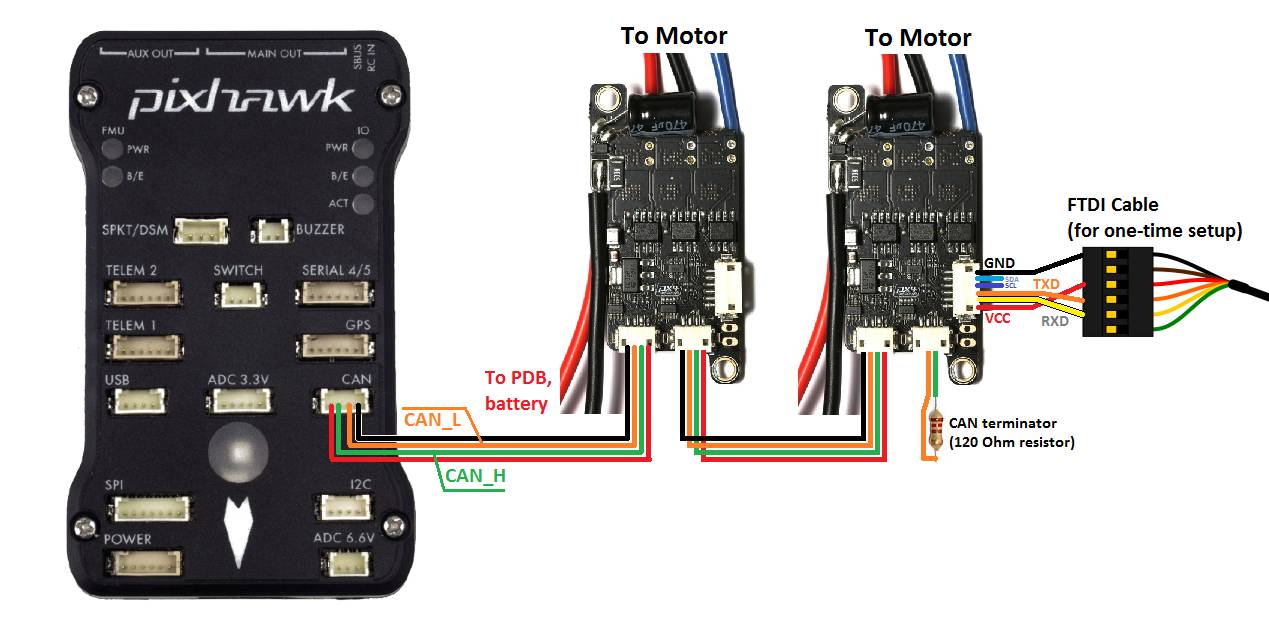
하나의 ESC(어느 것이든 상관 없음)는 4핀 DF13 – 4핀 DroneCAN 어댑터 케이블을 사용하여 자동 조종 장치의 CAN 포트에 연결해야 합니다. 각 후속 ESC는 4핀 DroneCAN 케이블을 사용하여 이전 ESC에 연결해야 합니다. 최종 ESC에는 4핀 DroneCAN 포트 중 하나에 연결된 CAN 버스 터미네이터가 있어야 합니다.
ESC의 디버그 포트에 대한 FTDI 케이블 연결은 ESC가 DroneCAN을 통해 매개변수를 제공하지 않는 경우에만 설정에 필요합니다. 이 경우 자세한 지침은 제조업체에 문의하십시오.
바람직하게 ESC는 DroneCAN GUI 도구 <common-uavcan-gui>를 사용하여 CAN 버스를 통해 구성할 수 있습니다 .



