
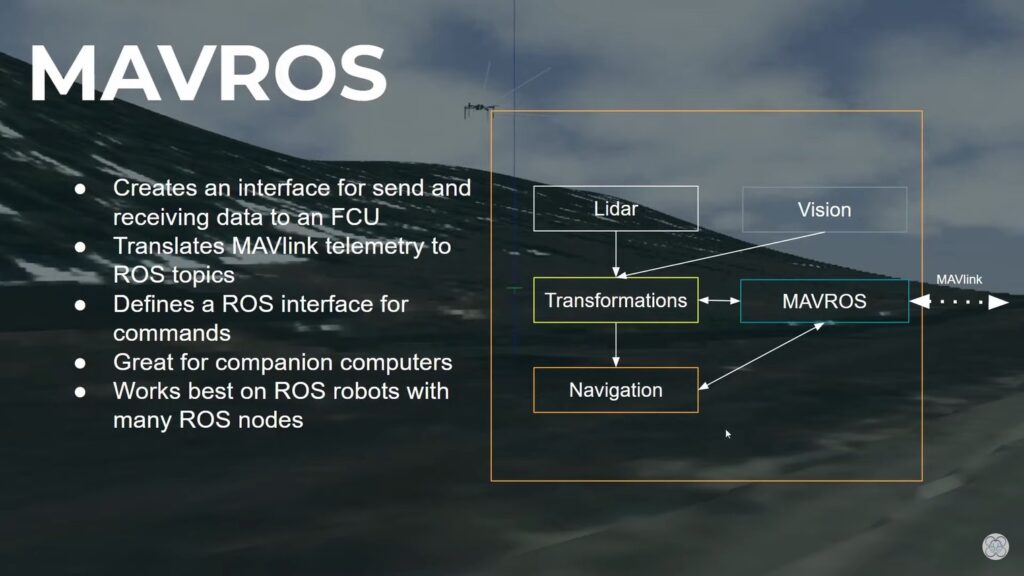
MavLink를 ROS에서 사용할 수 있도록 MAVLINK 메시지(dialect)를 ROS 메시지로 정의하고 서비스와 메시지를 송수신 하는 MAVROS 노드를 생성하여 사용 합니다.
ArduPilot, PX4 모두 범용적으로 사용할 수 있으며, 현재 ROS2 Humble 까지 지원 합니다.
< 1 min read
MavLink를 ROS에서 사용할 수 있도록 MAVLINK 메시지(dialect)를 ROS 메시지로 정의하고 서비스와 메시지를 송수신 하는 MAVROS 노드를 생성하여 사용 합니다.
ArduPilot, PX4 모두 범용적으로 사용할 수 있으며, 현재 ROS2 Humble 까지 지원 합니다.
제공 BetterDocs



