

📢 QUAD 테크니컬 라이터(블로그 기부 필진) 1기 모집
“당신의 Pixhawk / ROS 2 지식을 공유하고, 대한민국 자율주행 드론 오픈소스 생태계를 함께 만들어가세요!”
쿼드는 설립 이래 육군 납품을 시작으로 KAIST, LIG넥스원 등 국내 유수의 연구기관 및 대학들과 함께하며 Pixhawk 기반 AI 자율주행 기술을 선도해 왔습니다.
우리가 가진 기술과 지식을 더 많은 개발자, 연구원, 학부 연구생, 대학원생들과 나누고, 함께 성장하는 오픈소스 자율비행 커뮤니티를 활성화하기 위해 [QUAD 공식 홈페이지 블로그]를 빛내줄 필진(지식 기부자)을 모집합니다.
📢 QUAD YouTube 채널 멤버십 종료 및 연구·교육 콘텐츠 전면 무료 개방 안내
저희 쿼드(QUAD)는 한 단계 더 높은 도약을 준비하며, 회원 여러분께 중요한 변화를 공유해 드리고자 합니다.
QUAD의 궁극적인 목표는 ‘글로벌 non-GPS 자율주행 드론 생태계의 대중화와 기술 거점 구축’입니다. 이에 따라, 소수 회원 중심의 유료 멤버십 체계를 종료하고, 그동안 축적된 Pixhawk, ROS 2, V-SLAM, 컴패니언컴퓨터 연동 등의 핵심 연구용 기술 콘텐츠를 전 세계 모든 개발자와 교육생들을 위해 전면 무료(개방형)로 전환하기로 결정하였습니다.
더 많은 이들이 드론 자율주행 기술을 배우고 연구할 수 있도록 기술 장벽을 허물고, QUAD가 글로벌 교육/연구용 드론 및 컨설팅 전문회사로 나아가는 첫걸음이 될 것입니다.
멤버십 종료 및 무료화 전환에 따른 아래 세부 내용은 블로그 공지를 참고해 주시기 바랍니다.
📺 진행중인 YouTube 강좌 :💎PX4 ‘장거리 하이브리드 무인 항법 시스템’ 만들기
📺 YouTube Live : 주간 드론,UAV 뉴스, 주간 픽스호크(PX4) 개발자 뉴스
비전문가도 실전 드론 개발자가 될 수 있도록,
픽스호크(PX4) · MAVLink · ROS 2 · Gazebo 기반 실무형 비행제어·시뮬레이션 교육과
실제 현장에서 쓰이는 픽스호크 드론 제품/솔루션을 제공합니다.
쿼드(QUAD) 드론연구소 소개
쿼드 드론연구소는 다음에 집중합니다.
- 비행제어·자율비행 기술 교육
- PX4, ROS2, AI, OpenCV, 시뮬레이션(Gazebo)
- 비전 기반 정밀 착륙, SLAM, VINS(Vision Inertial Navigation System), 비행로그 분석 등 실전 주제
- 대학생 캡스톤 디자인 지원
- 현장 중심의 드론 개발 노하우 공유
- 실제 프로젝트에서 겪은 시행착오와 팁을 숨기지 않고 공개
- 하드웨어 선택, 통신, 전파법, 인증, 양산 초기 단계까지 함께 고민
- 드론 제품/솔루션 기획·개발
- 교육, 연구용 자율주행 드론 개발 키트
- 테스트베드 기체
- 특정 미션(정찰, 측량, 연구용 등)에 특화된 플랫폼
“문서로 끝나는 교재”가 아니라,
원리를 이해하고, 직접 코딩하고, 날리고, 수정하는 과정을 함께 가져가는 것이 목표입니다.

교육 커리큘럼 안내
[🐣Course 01] 세미나 과정 (1일 / 6H)
- 주제: 드론 자율비행 이론 및 AI, V-SLAM 개요
- 대상: 자율주행 드론 개발 입문자, 프로젝트 기획자
- 핵심 내용:
- Pixhawk(PX4) 시스템 및 소프트웨어 아키텍처 이해
- MAVLink & MAVSDK 드론 개발 프로그래밍 기초
- uORB를 이용한 ROS2 드론 개발 프로그래밍 기초
- YOLO & OpenCV를 이용한 자율주행 개념 파악
- Pixhawk(PX4)와 V-SLAM 통합 개념 파악
[🚀Course 02] 프로그래밍 기본 과정 (2일 / 12H)
- 주제: 픽스호크 자율주행드론 제어 마스터
- 대상: 드론 관련 캡스톤 디자인을 준비중인 대학생, ROS2 및 시뮬레이션 기반 개발 희망자
- 핵심 내용:
- Gazebo 시뮬레이터(SITL) 기반 실습
- ROS2 기초 및 프로그래밍 (Node, Topic, Service)
- TF2, URDF 시각화 및 실제 기체(Q250-V3) 세팅
- uORB를 이용한 ROS2 드론 개발 프로그래밍 기초
[🏆Course 03] 종합 마스터 과정 (4일 / 24H)
- 주제: 픽스호크 AI, V-SLAM 자율주행드론 개발 전과정
- 대상: 드론 관련 캡스톤 디자인을 준비중인 대학생, 석·박사급 연구원, 기업 R&D 핵심 인력
- 핵심 내용:
- 컴패니언 컴퓨터(Jetson)와 FC(Pixhawk) 완벽 연동
- 쿼드(QUAD) 드론연구소에서 자체 개발한 컴패니언컴퓨터 SW(SD카드) 제공(실전에 바로 사용 가능)
- PX4 uORB 및 ROS2 미들웨어 심화 프로그래밍
- AI 실전: YOLO-Python 기반 객체 감지 및 추적(Track), OpenCV를 이용한 드론의 정밀 착륙, AI-드론을 활용한 자율주행 드론 공원 관리 앱 예제 제공
- Isaac ROS2 V-SLAM을 이용한 non-GPS 자율주행 드론의 개발
QUAD 교육만의 3가지 차별점
- 현장 중심의 온라인 교재와 SW 제공: 종이 교재가 아닌, 지속적으로 업데이트되는 Gitbook 기반 온라인 교재를 제공하여 교육 후에도 현업에서 즉시 활용 가능합니다.
- 독보적인 non-GPS 기술: 단순 비행이 아닌 터널, 지하, 실내 등 GPS가 수신되지 않는 극한 환경에서의 자율주행 기술(VIO, SLAM)을 전수합니다.
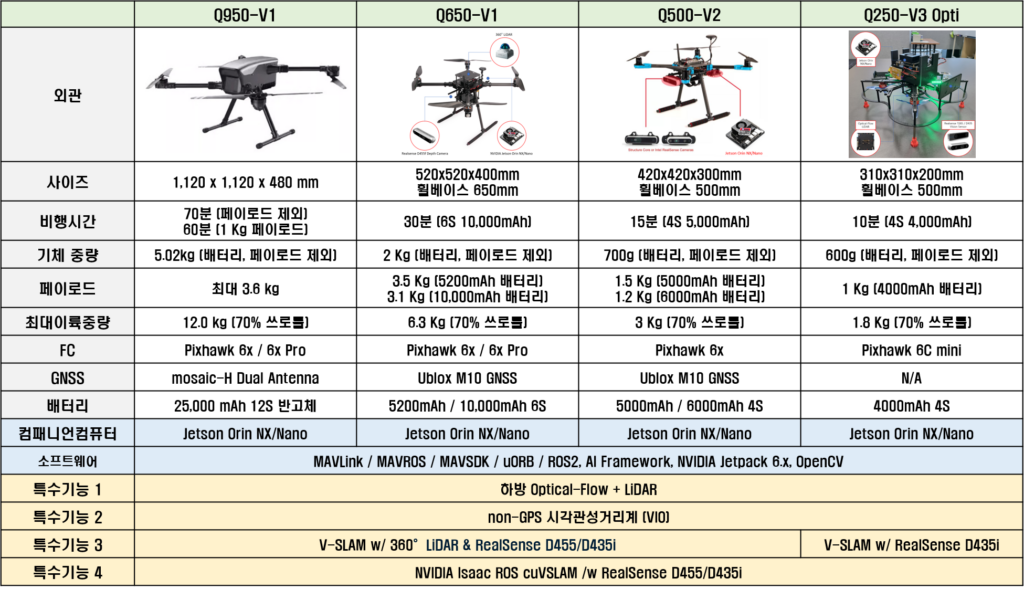
- 검증된 개발 키트 활용: * Q650-V1, Q500-V2, Q250-V3 등 실제 대학 및 기업 연구소에서 사용 중인 쿼드(QUAD)의 자체 드론 키트로 실습합니다.
YouTube 학습 채널 안내
유튜브 쿼드 드론연구소 채널은 단계별로 필요한 내용만 골라 배울 수 있도록 설계했습니다.
👨✈️ 입문파일럿 (Entry Pilot)
- 대상: 드론 개발은 처음이지만, 직접 세팅하고 띄워보고 싶은 분
- 제공 내용
- 입문자를 위한 기초 과정:
- 픽스호크 PX4 펌웨어 동작(센서 퓨전 EKF 알고리즘, PID, 비행제어, FFT 진동제어) 이해
- PX4 & QGroundControl 기본 설정
- 비행 모드 이해, 안전비행 절차
- 입문용 GitBook 교재 열람 (Non-GPS/기본 GPS 기체 위주)
- 추천 부품 리스트, 셋업 체크리스트
- 입문자를 위한 기초 과정:
🎖️ 개발자랩 (Developer Lab)
- 대상: 코드까지 직접 만지면서 드론을 개발하고 싶은 엔지니어/학생
- 제공 내용
- MAVLink 이해
- MAVSDK, MAVROS, ROS 2 · Gazebo 시뮬레이션 강좌
- PX4 펌웨어 구조 이해, 빌드/모듈 수정 예제
- GitBook 기반 심화 교재 전체 열람(개발자 랩 전용)
- 예제 코드(GitHub)와 연동된 실습 과제
🥇 전문가랩 (Expert Lab)
- 대상: 실제 프로젝트를 진행 중이거나,
연구·사업용 드론 플랫폼을 만들고 싶은 분 - 제공 내용
- 실내/Non-GPS 환경에서의 위치 추정·센서 융합
- NVIDIA isaac-ros-vslam VINS를 이용한 non-GPS SLAM 및 자율주행 실전 케이스
- 프로젝트 설계 리뷰, 시스템 아키텍처 예시
- 전문가랩 전용 GitBook 교재·자료
💎 다이아몬드랩 (Diamond Lab)
- 대상: 자신만의 드론 제품/서비스를 사업화하려는 분
- 제공 내용
- 비전 기반 착륙(ArUco / IR-Lock / Visual SLAM) 실전 케이스
- PX4의 새로운 ROS2 Interface Library C++ 프로그래밍 기법
- 프로젝트 기획 · 견적 · 일정 수립 실전 템플릿
- 기관·기업 제안서 예시, 테스트 플랜 예시
- 개별 프로젝트 상담(라이브/Q&A 세션 안내에 따라)
- 다이아몬드랩 전용 심화 자료 및 내부 노트
각 등급별로 교재 메뉴(🛠️ / 👨✈️ / 🎖️ / 🥇 / 💎)와
GitBook 스타일의 온라인 교재가 연결되어,
등급에 맞는 강좌/자료만 편하게 찾아볼 수 있도록 구성되어 있습니다.
제품 및 솔루션 소개
쿼드 드론연구소는 교육용을 넘어, 실제 프로젝트에 바로 투입 가능한
픽스호크 기반 드론 플랫폼과 개발용 키트를 제공합니다. (✉️ maponarooo@naver.com)
앞으로의 계획
- 유튜브 멤버십 등급과 연동된 온라인 교재(GitBook) 고도화
- 실습 위주 Non-GPS/실내 비행, 비전 기반 자율비행 강좌 확대
- 교육용·연구용 드론 키트 고도화
- 글로벌 교육 확대
문의 및 협업
- 드론 개발·커스터마이징 의뢰
- 기관·기업용 프로젝트/교육 협업
- 031-680-1311 / maponarooo@naver.com
언제든지 Contack 페이지 또는 메일을 통해 연락 주세요.
현장에서 바로 쓸 수 있는 드론 개발 파트너가 되겠습니다.