
MAVLink 기반 시스템용 UAV 지상국 소프트웨어 패키지
MAVProxy는 UAV용으로 완벽하게 작동하는 GCS로, MAVLink 프로토콜을 지원하는 모든 AutoPilot 시스템(예: ArduPilot을 사용하는 시스템)을 위한 미니멀하고 휴대 가능하며 확장 가능한 GCS로 설계되었습니다. MAVProxy는 강력한 명령줄 기반 “개발자” 지상국 소프트웨어입니다. 추가 모듈을 통해 확장하거나 Mission Planner, APM Planner 2, QGroundControl 등과 같은 다른 지상국으로 보완하여 그래픽 사용자 인터페이스를 제공할 수 있습니다.
UDP를 통해 네트워크를 통해 UAV에서 다른 장치의 여러 지상국 소프트웨어로 메시지를 전달하는 기능 을 포함하여 여러 주요 기능이 있습니다 .
MAVProxy는 일반적으로 개발자(특히 SITL과 함께)가 새 빌드를 테스트하는 데 사용합니다.
MAVProxy는 ArduPilot과 함께 컴패니언 컴퓨팅 및 다중 데이터 링크를 사용할 수 있도록 CanberraUAV 에서 처음 개발되었습니다 . ArduPilot 생태계에서 가장 다재다능한 도구 중 하나로 성장했으며 사용자가 현재 다른 GCS 도구에서 볼 수 있는 많은 기능의 기원을 MAVProxy로 추적할 수 있습니다.
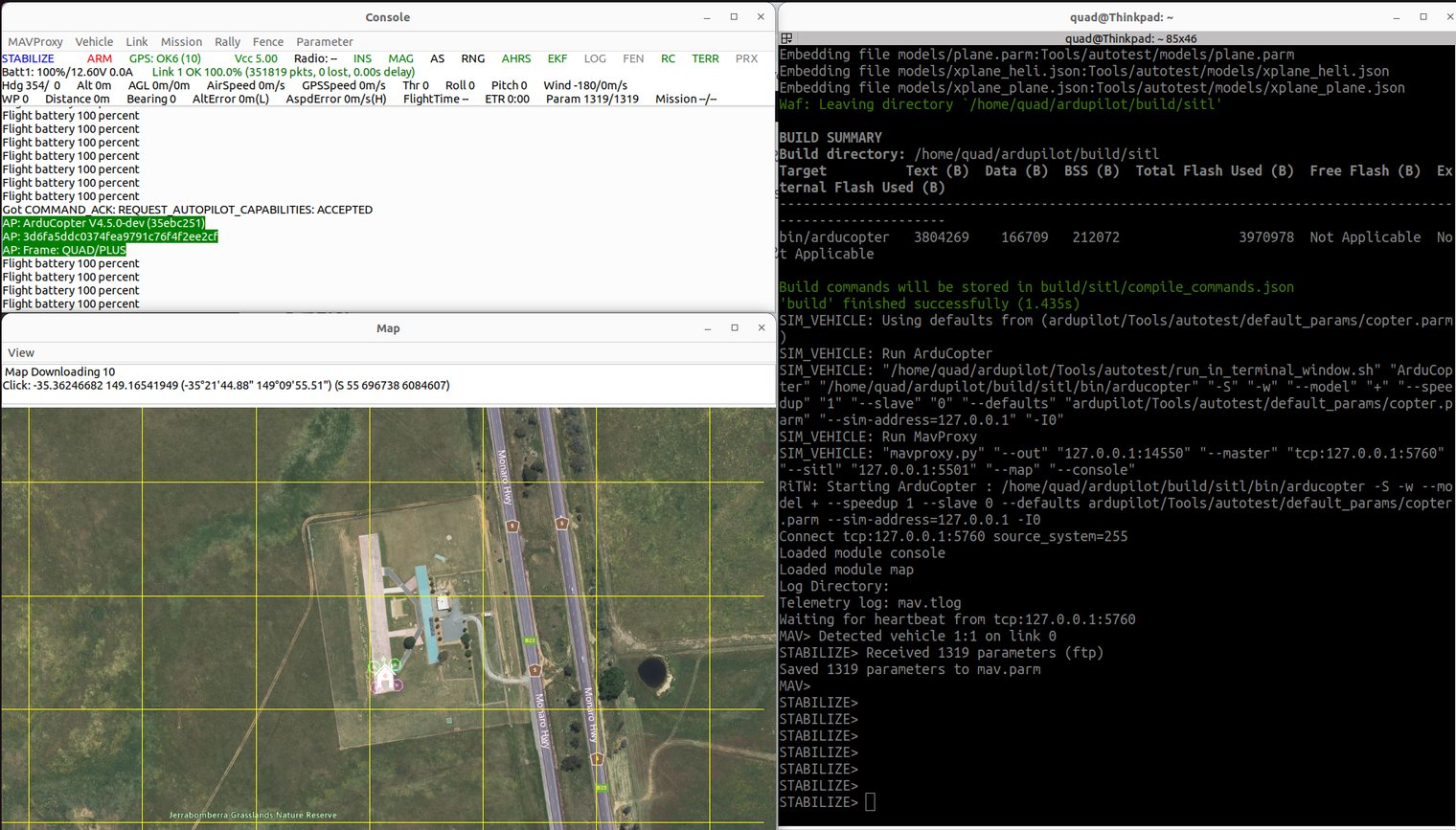
특징
- 명령줄 콘솔 기반 앱입니다. 기본 GUI를 제공하기 위해 MAVProxy에 플러그인이 포함되어 있습니다.
- 네트워크로 연결되어 여러 대의 컴퓨터에서 실행할 수 있습니다.
- 휴대가 가능합니다. Python, pyserial 및
select()함수 호출이 포함된 POSIX OS(Linux, OS X, Windows 등)에서 실행되어야 합니다. - 가벼운 디자인으로 작은 넷북에서도 쉽게 실행할 수 있습니다.
- 로드 가능한 모듈을 지원하며 콘솔, 무빙 맵, 조이스틱, 안테나 추적기 등을 지원하는 모듈이 있습니다.
- 명령의 탭 완성.



