2025 PX4 Developer Summit 리뷰 Part-1: 기조 연설(Lorenz Meier)
크리스마스가 멀지 않아 그런지 날씨가 많이 추워졌습니다.
지난주에 저는 감기에 걸려서 고생을 좀 했는데요, 구독자님들은 감기 걸리지 않도록 건강 관리 유의 하시기 바랍니다.
이번 포스팅은 지난주에 저희 YouTube 채널 “픽스호크 주간 기술동향“에서 소개해 드렸던 지난 11월 10-11일에 미국 Atlanta에서 있었던 ‘2025 PX4 Developer Summit’ 내용을 전체적으로 살펴보고 시사점에 대해 애기를 해 볼까 합니다.
YouTube에 재생목록이 있으니 참고하셔서 관심있는 내용을 보시면 좋은 정보를 얻을 수 있을거 같네요.
주요 기조연설 (Keynotes)
- Keynote: Lorenz Meier – PX4 창시자인 Lorenz Meier가 드론 산업의 역사와 미래, 그리고 오픈소스의 중요성에 대해 발표합니다.
- Keynote: Welcome & Opening Remarks (Ramon Roche) – 드론코드 재단(Dronecode Foundation)의 GM인 Ramon Roche가 행사의 시작을 알리며 PX4 커뮤니티의 성장과 비전을 공유합니다.
- Keynote: Becoming a Contributor (Jacob Dahl) – ARK Electronics의 임베디드 엔지니어 Jacob Dahl이 PX4 오픈소스 프로젝트에 기여하는 방법과 중요성에 대해 이야기합니다.
- Keynote: Open Robotics Project Updates (Michael Carroll & Addisu Taddese) – Intrinsic의 엔지니어들이 ROS 2와 Gazebo 등 오픈 로보틱스 프로젝트의 최신 업데이트를 공유합니다.
기술 세션: 제어 및 자율비행 (Control & Autonomy)
- From Pixels To Propellers: Sim2Real Control and Vision-based Navigation (Mihir Kulkarni) – GPS가 없는 환경에서 시뮬레이션 학습(Sim2Real)과 비전 센서를 활용해 자율 비행하는 기술을 소개합니다.
- Fly-by-Cam: Enabling Vision-First UAV Navigation (Anastasiia Dolgaryeva) – 시각 정보(Vision)를 최우선으로 하는 UAV 내비게이션 기술에 대해 다룹니다.
- Scaling PX4 for Heavy-Lift Drones (Aniruddha Mallick) – 대형 화물 드론(Heavy-Lift Drone)을 위한 경로 계획 및 제어의 기술적 과제와 해결책을 제시합니다.
- Fixed-wing Control API (Silvan Fuhrer) – 고정익 드론 제어를 위한 새로운 API와 활용법을 소개합니다.
- Taming the Wing: A Standardized Workflow for PX4 Fixed-Wing Tuning – 고정익 드론의 튜닝 과정을 표준화하여 더 쉽고 효율적으로 설정하는 방법을 설명합니다.
- Design MC Gains From First Principles Within the PX4 Architecture (Henry Kotzé) – PX4 아키텍처 내에서 멀티콥터(MC)의 제어 게인(Gain)을 원칙에 기반하여 설계하는 방법을 다룹니다.
- Micro XRCE-DDS를 통한 PX4 및 ROS 2: 구성, 함정 및 솔루션 – Beniamino Pozzan – Micro XRCE-DDS 인터페이스를 통해 PX4를 ROS 2 생태계에 통합할때 고려사항을 설명합니다.
- SAVLoc: 창고 내 PX4를 위한 구조 지원 시각적 위치 파악 – Michael Baldwin – 이 발표에서는 창고 환경에서 자율 주행을 위한 PX4 드론에 “SAVLoc” 또는 구조 기반 시각 위치 추정이라는 새로운 시각 기반 위치 추정 방법을 개발하고 통합하는 방법을 소개합니다.
기술 세션: 시스템 및 툴 (Systems & Tools)
- Accelerating PX4 Flight Review with AI (Benji Barash) – Roboto AI에서 개발한 AI 기반 로그 분석 툴을 이용해 비행 데이터를 자동으로 검토하고 문제를 진단하는 방법을 시연합니다.
- PX4 Device Manifest (Niklas Hauser & Alexander Lerach) – Auterion에서 제안하는 하드웨어 설정 관리 및 디바이스 매니페스트 시스템을 소개합니다.
- Fuse, Reset, or Reject? Handling Various Data-sources in EKF2 – 다양한 센서 데이터를 EKF2(확장 칼만 필터)에서 어떻게 융합하고 처리할지, 데이터 오류 시 대처법을 심도 있게 다룹니다.
- MAVLink Tools: Tomorrow’s Solutions for Today’s Problems (Patrick José Pereira) – 드론 통신 프로토콜인 MAVLink를 더 효율적으로 다루기 위한 최신 툴과 솔루션을 소개합니다.
초보자 및 실전 가이드 (Guides & Tutorials)
- Multicopter 101: From Design To Flight With PX4 (Matthias Grob) – 멀티콥터 설계부터 실제 비행까지의 전 과정을 초보자도 알기 쉽게 설명합니다.
- From Defaults To Flight in 15 Minutes (Alex Klimaj) – 기본 설정에서 실제 비행 준비까지 15분 안에 완료하는 노하우를 공유합니다.
- From Data To Deployment: Advanced UAV Modeling… (Ronal George & Eric Hillsberg) – MathWorks(매트랩) 툴을 활용하여 UAV를 모델링하고 제어 알고리즘을 배포하는 워크플로우를 소개합니다.
기타 흥미로운 세션
- Throw Your Drone Out of the Window! (Michał Barciś) – 파격적인 제목의 이 세션은 드론의 극한 상황 테스트나 복구 알고리즘 등 흥미로운 주제를 다룰 것으로 보입니다.
- Teaser Stream & Recap – 행사 전 티저 영상 및 행사 하이라이트를 담은 리캡 영상들입니다.
이번 개발자 모임에서는 지난해 모임보다 훨씬 많은 참석자와 스폰서들이 참여해 높은 수준의 발표를 해서 비약적으로 발전된 픽스호크 PX4의 위상을 느낄 수 있었습니다.

오늘은 이틀간 있었던 많은 세션 가운데 PX4의 창시자이자 Auterion의 CEO인 로렌츠 마이어(Lorenz Meier)가 진행한 기조연설(Keynote)을 살펴보고 마무리 하고자 합니다.
주요 내용은 다음과 같습니다.

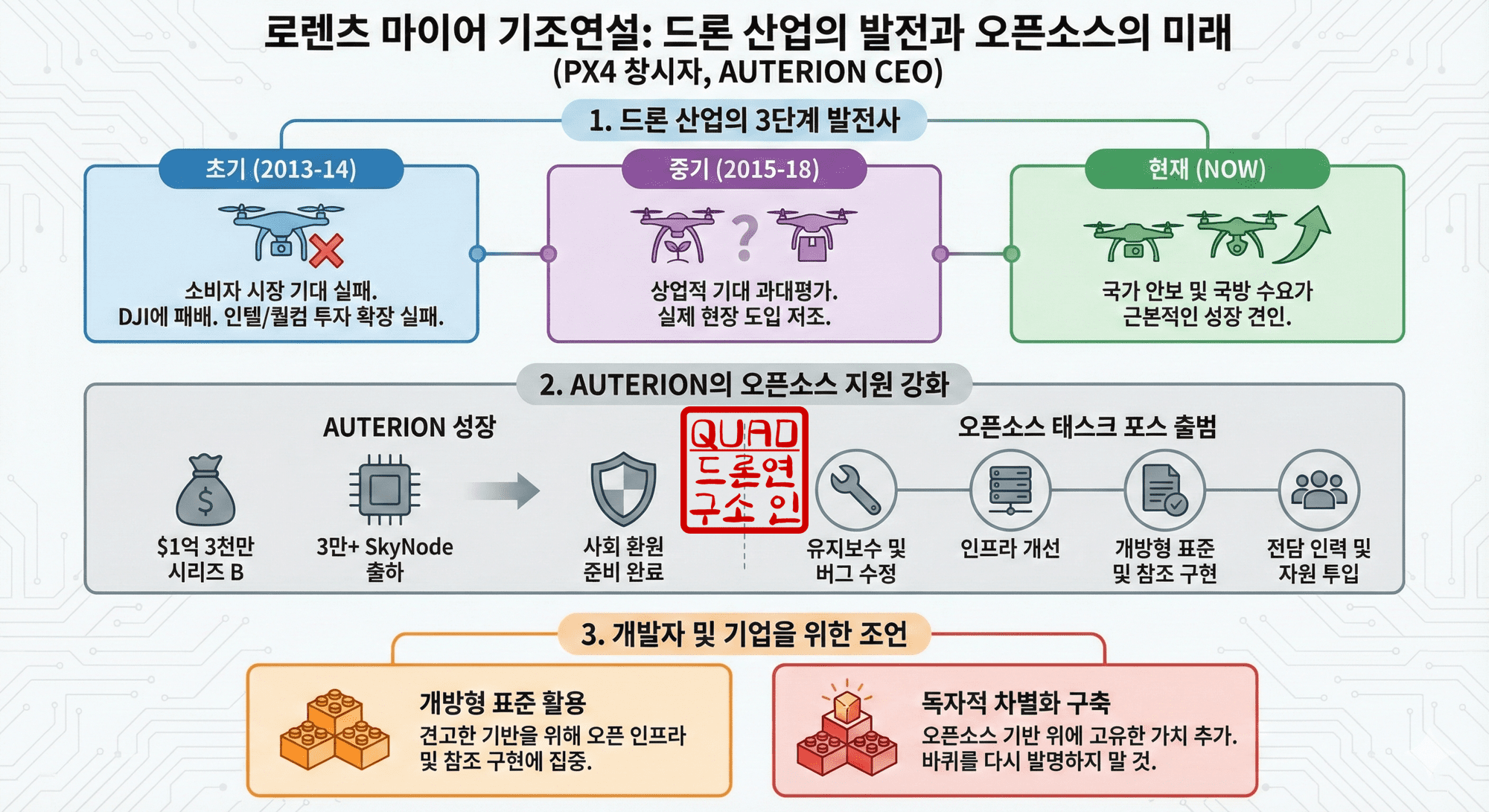
1. 드론 산업의 3단계 발전사
- 초기 (2013~2014년): 소비자용 드론 시장에서 DJI와 경쟁했으나 패배했으며, 인텔과 퀄컴 등이 막대한 투자를 했음에도 시장 확장에 실패했던 시기입니다.
- 중기 (2015~2018년): 상업용 드론(농업, 배송 등)에 대한 과도한 기대(Hype)가 있었으나, 실제 현장에서는 예상만큼 대규모의 드론이 필요하지 않아 확장이 더뎠습니다.
- 현재: 국방 및 국가 안보(National Interest)와 같은 필수적인 수요가 새로운 성장을 주도하고 있으며, 이는 단순한 유행이 아닌 근본적인 수요에 기반하고 있습니다.
2. Auterion의 오픈소스 지원 강화
- Auterion은 최근 1억 3천만 달러 규모의 시리즈 B 투자를 유치하고 3만 대 이상의 SkyNode를 출하하는 등 성장하였으며, 이를 통해 오픈소스 커뮤니티에 더 크게 기여할 준비가 되었습니다.
- 이를 위해 **’오픈소스 태스크 포스(Open Source Task Force)’**를 공식 출범하여, 새로운 기능 개발뿐만 아니라 버그 수정, 유지보수, 인프라 개선 등 실질적이고 중요한 작업에 전담 인력을 투입할 계획입니다.
3. 개발자 및 기업을 위한 조언
- 개방형 표준(Open Standards)을 정립하고 참조 구현을 제공하는 데 집중할 것입니다.
- 개발자와 기업들은 오픈소스 인프라를 적극 활용하되, 그 위에 자신들만의 차별화된 가치(Proprietary differentiation)를 얹는 방식으로 사업을 전개해야 한다고 조언했습니다.
- 드론 산업은 이제 항공 산업의 초기처럼 장기적인 성장의 기틀을 마련했으며, 지금이 가장 견고하고 잠재력이 큰 시기라고 강조했습니다.
결론적으로, 로렌츠 마이어는 드론 산업이 국방 및 안보 수요를 통해 본격적인 성장 궤도에 올랐음을 시사하며, Auterion이 오픈소스 생태계의 유지보수와 표준화를 위해 더욱 강력하게 지원할 것임을 약속했습니다.
그럼 오늘 포스팅은 이걸로 마칩니다. 구독자님들 모두 Merry Christmas~~~


작성자 : 마포나루, 쿼드(QUAD) 드론연구소 대표
기고일 : 2025-12-09
![[MAVSDK C++ Part 4] Building Your Own App: Project Setup and Drone Connection](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0314_인포그래피-768x512.png)
![[Hybrid Navigation System Part 4: Integration] Integrating PX4 and External INS Odometry via ROS 2 and Communication Verification](https://quad-drone-lab.co.kr/wp-content/uploads/2026/04/Drone-Navigation-Data-Integration-Flow-1-768x429.jpg)
![PX4 MAVSDK – C++ Programming [7편] 특정 위치로 이동 (goto_location) 및 하버사인 공식의 이해](https://quad-drone-lab.co.kr/wp-content/uploads/2026/03/0317_인포-768x512.png)