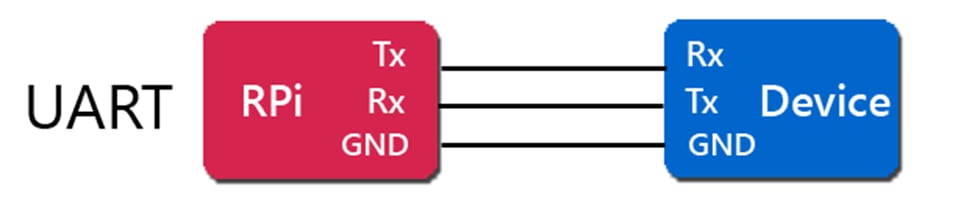
UART(범용 비동기화 송수신기: Universal asynchronous receiver/transmitter)
병렬 데이터의 형태를 직렬 방식으로 전환하여 데이터를 전송하는 컴퓨터 하드웨어의 일종이다.
UART는 일반적으로 EIA RS-232, RS-422, RS-485와 같은 통신 표준과 함께 사용합니다.
UART의 U는 범용을 가리키는데 이는 자료 형태나 전송 속도를 직접 구성할 수 있고 실제 전기 신호 수준과 방식(이를테면 차분 신호)이 일반적으로 UART 바깥의 특정한 드라이버 회로를 통해 관리를 받는다는 뜻이다.
통신 데이터는 메모리 또는 레지스터에 들어 있어 이것을 차례대로 읽어 직렬화 하여 통신합니다. 최대 8비트가 기본 단위이다.
UART는 일반적으로 컴퓨터나 주변 기기의 일종으로 병렬 데이터를 직렬화 하여 통신하는 개별 집적 회로이다. 비동기 통신이므로 동기 신호가 전달되지 않는다. 따라서 수신 쪽에서 동기신호를 찾아내어 데이터의 시작과 끝을 시간적으로 알아 처리할 수 있도록 약속되어 있습니다. 디지털 회로는 자체의 클럭 신호를 추가로 사용하여 정해진 속도로 수신 데이터로 부터 비트 구간을 구분하고 그 비트의 논리 상태를 결정하여 데이터 통신을 하는 USRT(범용 동기화 송수신기: Universal synchronous receiver/transmitter)도 사용합니다.
참고 https://ko.wikipedia.org/wiki/UART
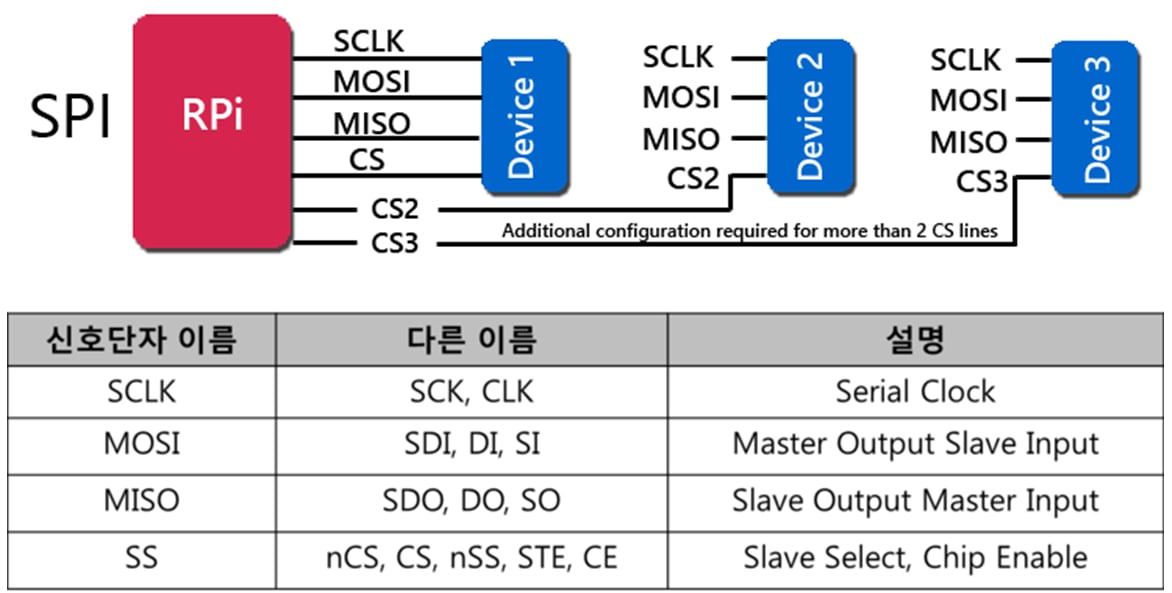
SPI 직렬 주변기기 인터페이스 버스(Serial Peripheral Interface Bus)
SPI 버스는 아키텍처 전이중 통신 모드로 동작하는 모토로라 아키텍처에 이름을 딴 동기화 직렬 데이터 연결 표준이다.
장치들은 마스터 슬레이브 모드로 통신하며 여기서 마스터 장치는 데이터 프레임을 초기화합니다.
여러 슬레이브 장치들은 개별 슬레이브 셀렉트 (칩 셀렉트) 라인과 함께 동작할 수 있습니다.
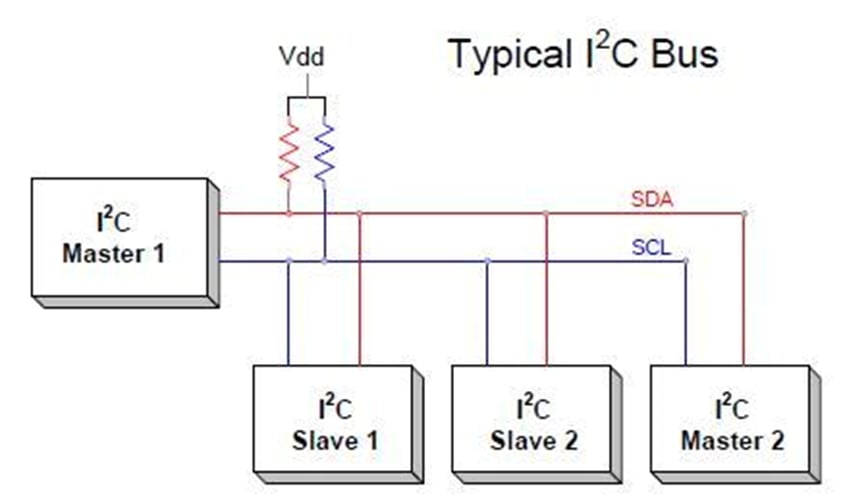
I2C(아이스퀘어드시, Inter-Integrated Circuit)
필립스에서 개발한 직렬 버스이다. 마더보드, 임베디드 시스템, 휴대 전화 등에 저속의 주변 기기를 연결하기 위해 사용된다.
2개의 입출력선을 이용하여 통신이 이루어지기 때문에, TWI (Two Wire Interface)라고도 불림.
2C 통신을 위한 장치는 마스터(Master)와 슬레이브(Slave)로 나뉨.
- 하나의 마스터에 다수의 슬레이브가 연결될 수 있음.
- 구별을 위해 각 슬레이브마다 고유한 주소 값을 갖도록 함.
- 슬레이브의 주소 값을 이용해 마스터는 한번에 하나의 슬레이브와 통신을 수행함.
- SCL(Serial Clock) : 마스터에서 슬레이브로 동기를 맞추기 위한 클럭 신호를 전송함.
- SDA(Serial Data) : SCL의 클럭 신호에 맞추어 마스터와 슬레이브 간에 데이터를 송수신함
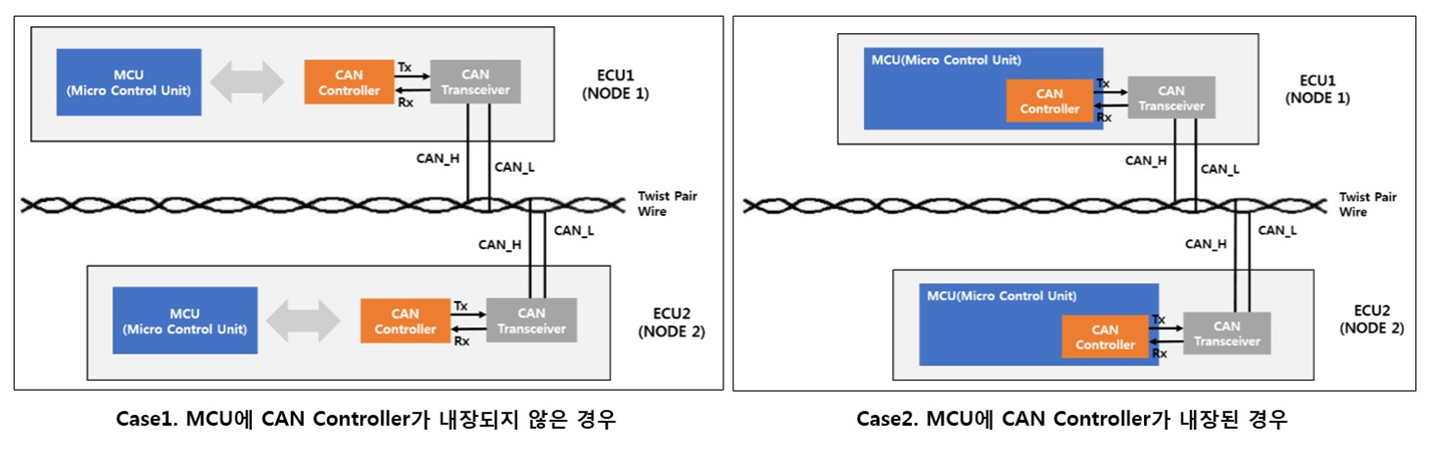
CAN(Controller Area Network)
차량 내에서 호스트 컴퓨터 없이 마이크로 컨트롤러나 장치들이 서로 통신하기 위해 설계된 표준 통신 규격입니다.
차량 내 *ECU(Electronic control unit)들은 CAN 프로토콜을 사용하여 통신합니다.
초기에는 차량 네트워크용으로 개발되었으나 최근에는 차량뿐만 아니라 산업 전 분야에 폭넓게 적용되고 있으며, 기본적인 시스템 구성은 아래와 같습니다.